- java.lang.Object
-
- GRobot
-
public class GRobot extends Object implements Poloha, Smer, Rozmer, Farebnosť, Priehľadnosť, Konštanty
Úvod
Táto dokumentácia je podporným materiálom na vyučovanie predmetov programovania v Jave s podporou programovacieho rámca GRobot. Obsahuje úplný opis všetkých tried a metód vrátane príkladov použitia. (Materiál môže byť priebežne aktualizovaný, preto odporúčame sledovať tieto stránky.)
Od 12. 3. 2019 je zdrojový kód programovacieho rámca GRobot umiestenný na serveroch GitHub. Jeho projekt je v nepravidelných intervaloch aktualizovaný. Môže nastať prípad, kedy sa aktuálna verzia tejto dokumentácie presunie na niektorú pridruženú službu repozitára. V tom prípade by sa táto informácia objavila v opise repozitára. Aktuálna verzia balíčka JAR (t. j. binárna verzia rámca), môže svoje umiestnenie tiež zmeniť. Aj o tejto skutočnosti sa pokúsime podať informáciu na vhodnom umiestnení (on-line).
Programovací rámec má uľahčiť vstup do problematiky programovania. Programovanie je široká oblasť. Vstup do tejto problematiky s použitím „čistého“ jazyka Java považujeme za náročný, preto vznikol tento rámec. Aby bol tento nástroj použiteľný, bolo nevyhnutné vypracovanie kompletnej dokumentácie, ktorú ponúkame na týchto stránkach.
Grafický robot je skonštruovaný do sveta s dvomi plátnami, na ktoré môže kresliť. Funkcionalitu robota zabezpečuje najmä ústredná trieda
GRobot. Okrem nej je rámci definovaných asi päťdesiat ďalších tried, ktoré podporujú fungovanie robotov, sveta, oboch plátien a ďalších prvkov, akými sú napríklad obrázky, zvuky, farby, zoznamy, udalosti, súbory a podobne… Tieto triedy vznikli prirodzeným vývojom a ich účelom je zjednodušenie používania celého rámca.Programovanie robota
Nasledujúci príklad ukazuje ako naprogramovať robot tak, aby nakreslil trojuholník (rovnostranný):
for(inti =0; i <3; ++i) {dopredu(50.0);doprava(120.0); }
Výsledok kreslenia trojuholníka.Príklad tri razy zopakuje dvojicu príkazov na pohyb robota o 50 bodov dopredu a otočenie o 120° doprava. Tým dostaneme trojuholník. (Na zamyslenie: prečo sa otáčame o 120°? Keď príklad chceme prepracovať tak, aby sa ním dal nakresliť ľubovoľný pravidelný n-uholník, musíme poznať odpoveď na túto otázku… Predtým, než sa pozriete na riešenie, skúste porozmýšľať…)
Príklad sme prepracovali tak, aby kreslil ľubovoľný pravidelný n-uholník so želanou dĺžkou strany. Zaviedli sme dve pomocné premenné, ktorých hodnoty stačí zmeniť:
intpočetUhlov =3;doubledĺžkaStrany =50.0;for(inti =0; i < početUhlov; ++i) {dopredu(dĺžkaStrany);doprava(360.0/ početUhlov); }(Teraz, keď ste uvideli riešenie, poznáte odpoveď na vyššie spomenutú otázku? Pri odpovedaní na otázku, prečo sa na nakreslenie trojuholníka otáčame práve o 120° môžeme zaujať najmenej dva rôzne postoje. Prvý postoj: Keď sa na problém pozrieme z nadhľadu – z pohľadu celkového pohybu robota a spýtame sa: koľko ráz sa musím otočiť, aby som nakreslil trojuholník? Odpoveď znie dva razy. Kvôli zjednodušeniu výpočtov zaveďme predpoklad, že robot musí skončiť otočený rovnakým smerom ako začínal. Keď sa potom sa spýtame: koľko ráz sa musí pri kreslení trojuholníka robot otočiť, aby skončil obrátený tým istým smerom ako začínal? Odpoveď znie tri, čo je rovnaký počet ako počet uhlov trojuholníka. V prípade, že kreslíme rovnostranný trojuholník, je miera otočenia sa v každom rohu rovnomerná, pretože všetky tri uhly sú rovnaké. Na otočenie sa okolo svojej osi o jednu otáčku, sa musí robot otočiť o 360°. Keď toto otočenie rovnomerne rozdelíme na tri diely, dostávame výsledok pootočenia sa v jednom rohu – 120°. Podobná úvaha platí pre každý pravidelný n-uholník. Druhý postoj: Keď sa na problém pozrieme detailnejšie len v kľúčovom bode pohybu robota – v rohu a zapojíme poznatky z geometrie, ktoré hovoria, že súčet všetkých uhlov v trojuholníku musí byť 180°. Keďže kreslíme rovnostranný trojuholník, sú všetky tri uhly rovnaké, to znamená 60°. Ibaže pozor, hovoríme o vnútorných uhloch trojuholníka. Musíme si uvedomiť, že robot je po nakreslení strany otočený „von“ z trojuholníka. Je obrátený v smere kreslenia prvej strany a na to, aby sa otočil do smeru kreslenia druhej strany, musí opísať „vedľajší“ uhol vnútorného uhla (t. j. doplnok k priamemu uhlu – 180°), čo je 120°.)
Všetky príklady v rámci tejto dokumentácie je nevyhnutné umiestniť do triedy. Vhodná je napríklad nasledujúca schéma:
Poznámka: Rovnakú schému generuje aj šablóna „Hlavná trieda aplikácie“ v slovenskom preklade softvéru BlueJ a tak isto aj generátor projektov od autora programovacieho rámca
GRobot, ktorý nájdete na jeho stránkach. Spomínaný generátor projektov uľahčuje študentom vytvorenie nového projektu BlueJ a nasledujúci import programovacieho rámcaGRobotdo projektu, ktorý by inak museli vykonávať ručne.importknižnica.GRobot;«importy ostatných tried, ktoré sú v projekte použité»publicclass«názov triedy»extendsGRobot{private«názov triedy»() {«sem vložte kód príkladu»}publicstaticvoidmain(String[] args) {new«názov triedy»(); } }Za «názov triedy» treba doplniť vhodný názov – mal by vystihovať podstatu (toho, čo trieda robí). Na miesto «sem vložte kód príkladu» treba vložiť príklad… Vyššie uvedený príklad s kreslením trojuholníka vyzerá v schéme triedy takto:
importknižnica.GRobot;publicclassTrojuholníkextendsGRobot{privateTrojuholník() { }publicstaticvoidmain(String[] args) {newTrojuholník(); } }V niektorých prípadoch treba medzi importované triedy zaradiť aj použité triedy Javy. Napríklad v príklade opisu metódy
náter, v ktorom sú použité triedy JavyRadialGradientPaint,MultipleGradientPaint.CycleMethod,MultipleGradientPaint.ColorSpaceType,Point2DaAffineTransform, preto ich treba importovať, o čom informuje aj upozornenie uvedené v rámci opisu metódynáter. Väčšinou sa podobné upozornenie nachádza v blízkosti príkladov, ktoré sa nespoliehajú len na funkcionalitu programovacieho rámca, ale v niektorých prípadoch sa mohlo stať, že na to dokumentácia explicitne neupozorňuje.Metódy a konštruktory
Funkčné prvky tried môžeme rozdeliť do dvoch základných kategórií:
- metódy
- a konštruktory.
Metódy sa starajú o fungovanie objektu počas jeho bytia, konštruktory spolupracujú pri vytváraní nového objektu. Konštruktor je vlastne špeciálnou odrodou metódy, ktorá nesmie mať určený žiadny návratový typ a musí sa volať rovnako ako trieda. Podľa toho ich ľahko rozlíšime. Nasledujúci príklad definuje jednoduchú triedu
Šípkas konštruktorom a metódou:importknižnica.GRobot;publicclassŠípkaextendsGRobot{publicŠípka() { definujVlastnéKreslenie(); }privatevoiddefinujVlastnéKreslenie() {vlastnýTvar(newKreslenieTvaru() {publicvoidkresli(GRobotr) { r.zdvihniPero(); r.posuňVľavo(0.5* r.veľkosť()); r.dozadu(r.veľkosť()); r.položPero(); r.doprava(15); r.dopredu(2* r.veľkosť()); r.doprava(150); r.dopredu(2* r.veľkosť());// Prípadné ďalšie príkazy…} }); } }
Vlastný tvar robota z príkladu vľavo po zväčšení robota na veľkosť 100
(šedá kružnica je len ilustračná).Okrem tohto rozdelenia, môžeme metódy rozdeliť do ďalších kategórií podľa účelu. Z programátorského fyzického hľadiska (z pohľadu jazyka Java) medzi nimi rozdiel nie je, ale z programátorského logického[1] hľadiska (z pohľadu programátora) ten rozdiel (prinajmenšom pre každého skúsenejšieho programátora) vidno. Jasne sa rysujú najmä dva druhy metód – takzvané „gettery“ a „settery,“ čo je nepreložiteľný názov vyplývajúci z účelu metód. Getter (z anglického „get“ – vziať) číta hodnotu vlastnosti a setter (z anglického „set“ – nastaviť) ju, naopak, zapisuje. Jednou z hlavných myšlienok objektovo orientovaného programovania vždy bolo mať súkromné vlastnosti a verejné metódy, ktoré s nimi pracujú. Z toho sa vyvinuli gettery a settery, ktoré síce nenašli pevné zakotvenie priamo v jazyku Java, ale programátori ich odlišujú od „klasických“ metód. Našiel sa aj zaužívaný spôsob vyjadrenia tejto skutočnosti v programe – najjednoduchší možný – v názve metódy. Gettery začínajú anglickým „get“ a settery „set“… Takto by vyzeral jednoduchý príklad triedy
Osobas vlastnosťouveka prislúchajúcim getterom a setterom:[1] – termín „logický“ je v počítačovej terminológii často používaný ako opak „fyzického“; logický môže znamenať všeobecný, nekonkrétny, patriaci do určitej množiny, vytvorený pre určité potreby… naopak fyzický znamená kokrétny, pevný, stanovený…; logický a fyzický v tomto prípade znamená akoby „pomyselný“ a „skutočný,“ pričom i ten pomyselný má v tomto prípade veľký význam, pretože dáva veciam určitý zmysel, kategorizuje ich, rozdeľuje…
publicclassOsoba {privateintvek;publicintgetVek() {returnvek; }publicvoidsetVek(intvek) {if(vek <0)thrownewGRobotException("Vek nesmie byť záporný!","negativeAge");this.vek = vek; } }V slovenskom názve anglické slovká get a set nevyzerajú príliš dobre, preto sme sa rozhodli ich v rámci projektu programovacieho rámca grafického robota zamlčať. Namiesto toho používame v rámci dokumentácie ikonu
 na getter a
na getter a  na setter.
Funkčnosť metód sa tým, samozrejme, nemení, ibaže bez explicitného
uvedenia „get“ a „set“ v názve ich nie je možné na prvý pohľad (podľa
názvu) rozoznať, preto sa to usilujeme kompenzovať aspoň v dokumentácii
pomocou ikon. Jestvujú vlastnosti, ktoré nemajú žiadny setter. Z toho
vyplýva, že sú určené len na čítanie. Výskyt opačného typu vlastností
(len na zápis) je v praxi veľmi zriedkavý. Obvykle by každá vlastnosť
mala mať možnosť čítania hodnoty. V tomto rámci sa vlastnosti určené len
na zápis nevyskytujú.
na setter.
Funkčnosť metód sa tým, samozrejme, nemení, ibaže bez explicitného
uvedenia „get“ a „set“ v názve ich nie je možné na prvý pohľad (podľa
názvu) rozoznať, preto sa to usilujeme kompenzovať aspoň v dokumentácii
pomocou ikon. Jestvujú vlastnosti, ktoré nemajú žiadny setter. Z toho
vyplýva, že sú určené len na čítanie. Výskyt opačného typu vlastností
(len na zápis) je v praxi veľmi zriedkavý. Obvykle by každá vlastnosť
mala mať možnosť čítania hodnoty. V tomto rámci sa vlastnosti určené len
na zápis nevyskytujú.Trieda
GRobota všetky triedy tohto balíčka obsahujú definície veľkého množstvo takzvaných aliasov.
Aliasy sú presne tým, čo slovo „alias“ vyjadruje – prezývkami. Potreba
ich vzniku vyplynula z častých (často zbytočných) drobných omylov (kvázi
„preklepov“) začínajúcich programátorov pri používaní robota (resp.
jazykov akým je Logo). Tie súviseli s nejednoznačnosťou (slovenského)
jazyka, v ktorom jestvuje množstvo synoným (v slovenčine sú to napríklad:
dopredu, vpred, dozadu, vzad a podobne). Časom bolo jasné, že na všetko
nebude možné vytvoriť alias, preto po dosiahnutí určitej úrovne nasýtenia
už ďalšie aliasy (v súvislosti s riešením synoným) nevznikali.
aliasov.
Aliasy sú presne tým, čo slovo „alias“ vyjadruje – prezývkami. Potreba
ich vzniku vyplynula z častých (často zbytočných) drobných omylov (kvázi
„preklepov“) začínajúcich programátorov pri používaní robota (resp.
jazykov akým je Logo). Tie súviseli s nejednoznačnosťou (slovenského)
jazyka, v ktorom jestvuje množstvo synoným (v slovenčine sú to napríklad:
dopredu, vpred, dozadu, vzad a podobne). Časom bolo jasné, že na všetko
nebude možné vytvoriť alias, preto po dosiahnutí určitej úrovne nasýtenia
už ďalšie aliasy (v súvislosti s riešením synoným) nevznikali.Alias vo väčšine prípadov iba volá originálnu metódu (resp. kopíruje správanie originálnej triedy, keďže aliasom môže byť i celá trieda). Z technického pohľadu to mierne zvyšuje režijné náklady na činnosť programu, preto i skúsenejším programátorom odporúčame používať vždy originálne metódy, nie aliasy. Rovnako, v súvislosti s aliasmi tried, originálne triedy a ich použitie v rôznych kontextoch je podrobnejšie testované. Aj preto odporúčame používať originály.
Každý slovenský identifikátor s diakritikou má tiež definovaný alias bez diakritiky, aby bolo rámec možné používať aj bez používania diakritiky (z historických dôvodov). Je však nevyhnutné byť pri používaní alebo nepoužívaní diakritiky jednotnotný: inak povedané, buď používať diakritiku dôsledne, alebo vôbec. Kritické sú prípady priradenia inštancie s diakritikou do premennej typu bez diakritiky. Nasledujúci riadok kódu nie je preložiteľný:
PolozkaPonukypoložka =newPoložkaPonuky("Položka");Rovnako nie je použiteľný žiadny identifikátor s čiastočne použitou diakritikou (napríklad
PriehľadnostaleboPriehladnosť). O problémoch s diakritikou v krátkosti informujeme aj v úvodnom slove.História
Tento programovací rámec (angl. framework) vznikol postupným vývojom a rozširovaním malého projektu, ktorý sa spočiatku volal
Korytnačka, medzitým chvíľu niesol beta označenieŽelva(táto verzia nebola nikdy publikovaná), potom bol premenovaný na Skupinu tried grafického robota, potom na Knižnicu grafického robota, ktorá bola nakoniec pretransformovaná na tento programovací rámec.Ako mohol názov pôvodnej triedy (
Korytnačka) zasväteným našepkať, počiatky tohto projektu čerpali inšpiráciu aj z filozofie programovacieho jazyka Logo a jeho pokračovateľov… Logo je programovací jazyk používaný vo výučbe. Keďže originál jazyka je určený pre anglicky hovoriace deti a študentov, vzniká po svete množstvo jazykových mutácií. Spomeňme dve najdôležitejšie v slovenskom jazyku: Comenius Logo a úspešného pokračovateľa Imagine. Vo svete Loga ide o programovanie kresliacej korytnačky, takže učiaci sa môže hneď vidieť výsledky svojho úsilia. Z toho je odvodený termín „korytnačia grafika.“ Svet grafického robota sa usiluje tieto princípy poskytnúť pre začínajúcich (i pokročilých) programujúcich v programovacom jazyku Java. Pozrime sa na stručnú históriu vývoja trošku podrobnejšie.Začalo sa to vývojom triedy
Korytnačkaniekedy v auguste roku 2010. Prvé verzie triedyKorytnačka(približne do verzie 4.0) boli významnou mierou inšpirované triedouTurtleautora Alfreda Herma (Odkaz: Alfred Hermes, Turtle class, 6a, 14.12.2003, English), ktorá je súčasťou balíka BlueJ. Boli jej rozšírením a dá sa povedať, že s ňou boli spätne kompatibilné.Ďalšie verzie sa od pôvodnej idey značne odchýlili, preto nebola deklarovaná spätná kompatibilita s pôvodnou triedou
Turtle, ani prvými verziami korytnačky. Takže môžeme povedať, že približne od verzie 4.0, ktorá vznikala niekedy koncom zimného semestra akademického roka 2010/2011, sa začal vývoj samostatnej triedyKorytnačka, ktorá už nebola postavená na jadre pôvodnej triedyTurtle.Na stránkach univerzity v Princetone (Zdroj: https://introcs.cs.princeton.edu/java/stdlib/) sme našli našli knižnicu pre študentov pozostávajúcu zo 17 tried. Z nich nás zaujala trieda
Draw, v ktorej sme našli cenné poznatky o práci s grafikou v Jave. S využitím týchto informácií sme začali budovať novú sériu korytnačiek (beta verzia nového radu bola vyvíjaná pod pracovným názvomŽelvaa bola už postavená na triedach s príponou 2D – napríkladGraphics2D…). Postupne pribúdali nové a nové vnorené triedy (niekedy nazývané aj zahniezdené triedy, angl. nested classes) a do stavu s funkčnou lúkou, oblohou, súbormi, udalosťami, automatickým časovačom a tak ďalej, sa trieda postupne prepracovávala od verzie 5.0 vyššie.Priebežne prechádzala výraznými úpravami, nie všetky čiastkové verzie boli publikované. Od verzie 6.9 boli k dispozícii aliasy všetkých metód a vlastností aj bez diakritiky. Táto verzia však nikdy neopustila súkromie prostredia svojho vzniku. Priniesla množstvo novej funkcionality, ďalšie vnorené triedy, nové metódy, zavrhla niektoré staršie koncepty, iné ponechala… Tým sa spätná kompatibilita opäť výrazne porušila.
Verzia korytnačky 7.0 už trieda „neuniesla“ svoje meno a na jej báze vznikol nový projekt. Keďže študenti (neznalí histórie Loga) mali veľa otázok v súvislosti s pomenovaním a fungovaním takto pomenovanej triedy (
Korytnačka– ako to, že kreslí – učíte nás, že názvy majú byť výstižné…) a i samotná postupne sa rozrastajúca korytnačka sa od pôvodného konceptu pridŕžajúceho sa logovskej jednoduchosti značne odchýlila, rozhodli sme sa, že zmena názvu a založenie nového projektu novému konceptu iba prospeje.Testovanie prvej beta verzie triedy
Robot0.6 sa začalo koncom augusta 2011 – rok po začatí vývoja pôvodnej korytnačky. Koncom septembra, po rozsiahlych úpravách a revíziách, prekročila verzia číslo 0.8 (pričom sme sa rozhodli, že verzia 1.0 bude priradená až prvej úplnej a riadne otestovanej verzii triedyRobot; vo verzii 0.8 stále chýbala definícia jednej triedy). V januári 2013 bola ústredná trieda premenovaná naGRobot. Keďže nešlo o výraznú zmenu názvu, číslovanie verzií bolo ponechané. Dôvody a dôsledky sú uvedené v zozname zmien (pri čísle verzie 1.33)…Ďalší z významných zlomov nastal na sklonku roka 2015. Knižnica bola rozdelená na viacero samostatných súborov a presunutá do balíčka s názvom
knižnica. Tým sa pôvodná knižnica priblížila ku korektnému prístupu tvorby programovacích rámcov (angl. framework) v jazyku Java. Tým sa však transformácia neskončila a významný prerod zaznamenala až v roku 2018, kedy boli všetky pôvodné aj novšie vnorené triedy (okrem jednej –Spojnica) presunuté na vyššiu úroveň v zmysle ich transformácie na samostatné triedy balíčka (aj keď v rámci balíčka zostali stále úzko prepojené) a knižnica (vtedy vo verzii 1.85) bola premenovaná na programovací rámec s číslom verzie 2.0.Transformácia bola dlho odkladaná, pretože po pôvodnom (počiatočnom) rozhodnutí umiestniť „všetko do jediného súboru“ bolo veľmi komplikované hľadať cestu späť. Preto pôvodná knižnica veľmi dlho zotrvávala v jednom súbore. S nárastom jej objemu počas jej vývoja narastal aj počet vnútorných prepojení, ktoré o to viac odďaľovali jej rozdelenie. Autor dokonca zvažoval zanechať po určitom čase túto vývojovú líniu projektu GRobot a začať vývoj úplne novej verzie umiestnenej v balíčku a rozdelenej do samostatných súborov úplne od začiatku. Lenže časová náročnosť takéhoto opätovného napísania celého rámca (v tom čase zvaného knižnicou) tento postup nedovolila. Preto sa vývoj novej línie nezačal a namiesto toho boli niektoré zmeny a kroky súvisiace s ďalším vylepšovaním programovacieho rámca vykonané priamo v tejto línii.
Poznámka: Na úplnosť dodajme, že pôvodný spôsob umiestnenia celej skupiny tried do jedného súboru malo jedno rýdzo pragmatické odôvodnenie. V tom čase autor úplne zavrhoval distribúciu predchodcov tohto rámca vo forme .jar balíčka a tiež nejestvoval generátor projektov. Študenti si museli vytvárať projekty sami a do každého nového projektu museli skopírovať celý obsah skupiny tried (v tom čase ešte korytnačky). Vzhľadom na prvé systematicky sa opakujúce skúsenosti získané ešte počas používania predchádzajúcej pomôcky (ktorou bola trieda
Konzola– jej účelom bolo predovšetkým zjednodušiť čítanie hodnôt zo štandardného vstupu, ktorým je predvolene klávesnica, a jej funkcionalitu GRobot absorboval s miernou transformáciou k svojim potrebám) bolo najjednoduchším riešením poskytnúť jediný nezbalený súbor na prevzatie, ktorý študenti jednoducho a priamo (bez rozbaľovania, bez komplikácií) umiestnili do priečinka s novým projektom. Z hľadiska princípov tvorby softvéru je tento dôvod určite absurdný, lenže tento softvér bol pôvodne primárne tvorený na účely výučby a tomuto cieľu podliehalo všetko, čo s projektom súviselo.Ďalšia odporúčaná študijná literatúra
1. Keogh, James: Java bez předchozích znalostí – průvodce pro samouky. 1. vyd. Brno : Computer Press, 2005. ISBN 80-251-0839-2. 2. Kalaš, Ivan a kol.: Informatika pre stredné školy. Bratislava : SPN, 2001. ISBN 80-08-01518-7. 3. Zajacová, Katarína: Základy programovania. Trnava : 2010. [online]. Dostupné na: http://cec.truni.sk/zajacova/2010_ZP_Java/index.html. Citované: 2010 – 2012. 4. Hudeková, Dominika: Zbierka úloh v Jave. Trnava : 2012. [online]. Dostupné na: http://cec.truni.sk/hudekova/2012_ZU_Java/index.html. Citované: 2012 – 2014. 5. Hudeková, Dominika – Novák, Lukáš: Java – programovací jazyk pre pokročilých programátorov + Java ako prvý programovací jazyk. Trnava : 2014. [online]. Dostupné na: http://cec.truni.sk/hudekova/2014_EU_Java/. Citované: 2014 – 2016. Študijná literatúra v anglickom jazyku
1. Barnes, J. David – Kölling, Michael: Objects First with Java: A Practical Introduction Using BlueJ: International Edition. 5/E. Canterbury, Kent : University of Kent, 2012. ISBN 978-013-283554-1. 2. The Java Tutorials (Learning the Java Language). Oracle, 1995, 2015. [online]. Dostupné na: https://docs.oracle.com/javase/tutorial/. Citované: 2015 – 2016. 3. Java Platform Standard Edition 8 Documentation. Oracle. [online]. Dostupné na: https://docs.oracle.com/javase/8/docs/. Citované: 2014 – 2016. Od verzie 1.0 vyššie je pravidelne aktualizovaný zoznam zmien.
-
-
Prehľad vnorených tried
Vnorené triedy Modifikátor a typ Trieda a opis static classGRobot.SpojnicaTáto trieda slúži na uchovávanie a prístup k vlastnostiam čiarových spojníc, ktoré sú definovateľné medzi robotmi.
-
Prehľad atribútov
Atribúty Modifikátor a typ Atribút a opis static PlátnopodlahaReprezentácia podlahy tohto sveta.static Schránkaschranka Alias pre schránka.static SchránkaschránkaStatická inštancia triedySchránka, ktorá umožňuje pracovať so schránkou operačného systému.static PlátnostropReprezentácia stropu tohto sveta.Súborsubor Alias pre súbor.SúborsúborKaždý robot smie otvoriť jeden textový (prípadne konfiguračný) súbor na čítanie alebo zápis.static SvetsvetRámec hlavného okna aplikácie.SVGPodporasvgExportAtribút na export kreslenia tohto robota do zadanej inštancieSVGPodpora.static SVGPodporasvgPodporaStatická inštancia triedySVGPodpora, ktorá zastrešuje podporu importu a exportu vektorových tvarov vo formáte SVG.-
Atribúty zdedené z rozhrania Smer
juh, JUH, juhovychod, JUHOVYCHOD, juhovýchod, JUHOVÝCHOD, juhozapad, JUHOZAPAD, juhozápad, JUHOZÁPAD, sever, SEVER, severovychod, SEVEROVYCHOD, severovýchod, SEVEROVÝCHOD, severozapad, SEVEROZAPAD, severozápad, SEVEROZÁPAD, vychod, VYCHOD, východ, VÝCHOD, zapad, ZAPAD, západ, ZÁPAD
-
Atribúty zdedené z rozhrania Farebnosť
akvamarinova, akvamarínová, antracitova, antracitová, atramentova, atramentová, biela, cervena, cierna, červená, čierna, fialova, fialová, hneda, hnedá, modra, modrá, nebeska, nebeská, oranzova, oranžová, papierova, papierová, preddefinovaneFarby, preddefinovanéFarby, purpurova, purpurová, ruzova, ružová, seda, siva, sivá, snehova, snehová, svetlaNebeska, svetláNebeská, svetloakvamarinova, svetloakvamarínová, svetloatramentova, svetloatramentová, svetlocervena, svetločervená, svetlofialova, svetlofialová, svetlohneda, svetlohnedá, svetlomodra, svetlomodrá, svetlooranzova, svetlooranžová, svetlopurpurova, svetlopurpurová, svetloruzova, svetloružová, svetloseda, svetlosiva, svetlosivá, svetlošedá, svetlotyrkysova, svetlotyrkysová, svetlozelena, svetlozelená, svetlozlta, svetložltá, šedá, tmavaNebeska, tmaváNebeská, tmavoakvamarinova, tmavoakvamarínová, tmavoatramentova, tmavoatramentová, tmavocervena, tmavočervená, tmavofialova, tmavofialová, tmavohneda, tmavohnedá, tmavomodra, tmavomodrá, tmavooranzova, tmavooranžová, tmavopurpurova, tmavopurpurová, tmavoruzova, tmavoružová, tmavoseda, tmavosiva, tmavosivá, tmavošedá, tmavotyrkysova, tmavotyrkysová, tmavozelena, tmavozelená, tmavozlta, tmavožltá, tyrkysova, tyrkysová, uhlikova, uhlíková, zelena, zelená, ziadna, zlta, žiadna, žltá
-
Atribúty zdedené z rozhrania Priehľadnosť
NEPRIEHLADNA, NEPRIEHĽADNÁ, NEPRIEHLADNE, NEPRIEHĽADNÉ, NEPRIEHLADNY, NEPRIEHĽADNÝ, NEVIDITELNA, NEVIDITEĽNÁ, NEVIDITELNE, NEVIDITEĽNÉ, NEVIDITELNY, NEVIDITEĽNÝ
-
Atribúty zdedené z rozhrania Konštanty
ANO, ÁNO, CAKAT, CISELNA_PREMENNA, CITANIE_GIF_ANIMACIE, CITANIE_PNG_SEKVENCIE, ČAKAŤ, ČÍSELNÁ_PREMENNÁ, ČÍTANIE_GIF_ANIMÁCIE, ČÍTANIE_PNG_SEKVENCIE, FAREBNA_PREMENNA, FAREBNÁ_PREMENNÁ, HORIZONTALNA, HORIZONTÁLNA, CHYBA_CITANIA_PNG_SEKVENCIE, CHYBA_CITANIA_SKRIPTU, CHYBA_ČÍTANIA_PNG_SEKVENCIE, CHYBA_ČÍTANIA_SKRIPTU, CHYBA_DVOJITA_MENOVKA, CHYBA_DVOJITÁ_MENOVKA, CHYBA_CHYBAJUCA_MENOVKA, CHYBA_CHÝBAJÚCA_MENOVKA, CHYBA_CHYBNA_STRUKTURA, CHYBA_CHYBNÁ_ŠTRUKTÚRA, CHYBA_NEZNAMA_MENOVKA, CHYBA_NEZNÁMA_MENOVKA, CHYBA_NEZNAME_MENO, CHYBA_NEZNÁME_MENO, CHYBA_NEZNAME_SLOVO, CHYBA_NEZNÁME_SLOVO, CHYBA_NEZNAMY_PRIKAZ, CHYBA_NEZNÁMY_PRÍKAZ, CHYBA_VOLANIA_SKRIPTU, CHYBA_VYKONANIA_PRIKAZU, CHYBA_VYKONANIA_PRÍKAZU, KOPIROVANIE_SUBOROV, KOPÍROVANIE_SÚBOROV, KRESLI_CENTROVANE, KRESLI_CENTROVANÉ, KRESLI_NA_STRED, KRESLI_PRIAMO, KRESLI_ROTOVANE, KRESLI_ROTOVANÉ, KRESLI_V_SMERE, LAVE, ĽAVÉ, mainDeveloper, mainDeveloperTitled, majorVersion, minorVersion, navrat, návrat, NIE, ODOVZDANIE_UDAJOV, ODOVZDANIE_ÚDAJOV, ODRAZ, ODRAZENIE, ODRAZIT, ODRAZIŤ, OPLOTENIE, OPLOTIT, OPLOTIŤ, PLOT, POLOHOVA_PREMENNA, POLOHOVÁ_PREMENNÁ, POROVNANIE_SUBOROV, POROVNANIE_SÚBOROV, PRAVE, PRAVÉ, PRERUSIT, PRERUŠIŤ, PRETOC, PRETOCENIE, PRETOCIT, PRETOČ, PRETOČENIE, PRETOČIŤ, PREVZATIE_UDAJOV, PREVZATIE_ÚDAJOV, PRIPAJANIE_SUBOROV, PRIPÁJANIE_SÚBOROV, RETAZCOVA_PREMENNA, REŤAZCOVÁ_PREMENNÁ, riadok, SPOSOB_DEAKTIVACIA, SPOSOB_ENTER, SPOSOB_ESCAPE, SPOSOB_SHIFT_TAB, SPOSOB_SHIFT_TABULATOR, SPOSOB_TAB, SPOSOB_TABULATOR, SPÔSOB_DEAKTIVÁCIA, SPÔSOB_ENTER, SPÔSOB_ESCAPE, SPÔSOB_SHIFT_TAB, SPÔSOB_SHIFT_TABULÁTOR, SPÔSOB_TAB, SPÔSOB_TABULÁTOR, strana, STREDNE, STREDNÉ, UKONCENIE_CHYBOU, UKONCENIE_SKRIPTU, UKONČENIE_CHYBOU, UKONČENIE_SKRIPTU, versionNote, versionString, VERTIKALNA, VERTIKÁLNA, VODOROVNA, VODOROVNÁ, VYKONAT_PRIKAZ, VYKONAŤ_PRÍKAZ, VYPISAT_MENOVKU, VYPÍSAŤ_MENOVKU, VYPISAT_MENOVKY, VYPÍSAŤ_MENOVKY, VYPISAT_PREMENNE, VYPÍSAŤ_PREMENNÉ, VYPISAT_PRIKAZ, VYPÍSAŤ_PRÍKAZ, VYPISAT_RIADOK, VYPÍSAŤ_RIADOK, VYPISAT_SKRIPT, VYPÍSAŤ_SKRIPT, years, yearsMonths, ZABRANIT_VYKONANIU, ZABRÁNIŤ_VYKONANIU, ZAPIS_GIF_ANIMACIE, ZÁPIS_GIF_ANIMÁCIE, ZAPIS_PNG_SEKVENCIE, ZÁPIS_PNG_SEKVENCIE, ZAVRETE, ZAVRETÉ, ZIADNA_CHYBA, ZIADNE, ZRUSIT, ZRUŠIŤ, ZVISLA, ZVISLÁ, ŽIADNA_CHYBA, ŽIADNE
-
-
Prehľad konštruktorov
Konštruktory Konštruktor a opis GRobot()Predvolený konštruktor nastavujúci predvolené vlastnosti robota.GRobot(int nováMaximálnaŠírka, int nováMaximálnaVýška)Konštruktor umožňujúci stanovenie iných rozmerov kresliacich plátien (podlahy a stropu) než predvolená.GRobot(int nováMaximálnaŠírka, int nováMaximálnaVýška, String novýTitulok)Konštruktor umožňujúci stanovenie iných rozmerov kresliacich plátien (podlahy a stropu) než je predvolená a zmenu titulku hlavného okna aplikácie sveta.GRobot(String novýTitulok)Konštruktor umožňujúci zmenu titulku okna aplikácie sveta.
-
Prehľad metód
Všetky metódy Inštančné metódy Skutočne definované metódy Modifikátor a typ Metóda a opis voidaktivacia() Alias pre aktivácia.voidaktivácia()Táto metóda je predvolene prázdna.voidaktivaciaOdkazu() Alias pre aktiváciaOdkazu.voidaktiváciaOdkazu()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidaktivaciaOkna() Alias pre aktiváciaOkna.voidaktiváciaOkna()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidaktivita()Táto metóda je predvolene prázdna.booleanaktivny() Alias pre aktívny.booleanaktívny()Overí, či je tento robot aktívny.voidaktivuj()Aktivuje robot a spustí časovač (ak je nečinný).voidaktivuj(boolean ajČasovač)Metóda má rovnaký účel ako metódaaktivuj()s tým, že dovoľuje programátorovi určiť, či má byť automaticky spustený časovač (ak nie je v činnosti).voidaktivuj(int trvanieAktivity)Metóda má rovnaký účel ako metódaaktivuj(), ibaže dovoľuje programátorovi určiť trvanie aktivity.voidaktivuj(int trvanieAktivity, boolean ajČasovač)Metóda spája funkcionalitu metódaktivuj(trvanieAktivity)aaktivuj(ajČasovač).voidbod()Nakreslí na aktuálnej pozícii robota bod alebo skupinu bodov (kruhovú oblasť) podľa aktuálnej hrúbky pera, najmenej však oblasť s veľkosťou jedného pixela.booleanbodV(double súradnicaBoduX, double súradnicaBoduY) Alias pre bodVKruhu.booleanbodV(Poloha objekt) Alias pre bodVKruhu.booleanbodVCeste(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa aktuálne súradnice zadaného bodu nachádzajú v uzavretej oblasti cesty, ktorá bola zaznamenaná kreslením aktuálneho robota od posledného použitia metódyzačniCestu.booleanbodVCeste(Poloha objekt)Funguje rovnako ako metódabodVCeste(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…booleanbodVElipse(double súradnicaBoduX, double súradnicaBoduY)booleanbodVElipse(double súradnicaBoduX, double súradnicaBoduY, double pomer)Zistí, či sa súradnice zadaného bodu nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi odvodenými z veľkosti robota a zadaného pomeru strán.booleanbodVElipse(double súradnicaBoduX, double súradnicaBoduY, double a, double b)Zistí, či sa súradnice zadaného bodu nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi zadaných poloosí.booleanbodVElipse(Poloha objekt)Funguje rovnako ako metódabodVElipse(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
booleanbodVElipse(Poloha objekt, double pomer)Funguje rovnako ako metódabodVElipse(x, y, pomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
booleanbodVElipse(Poloha objekt, double a, double b)Funguje rovnako ako metódabodVElipse(x, y, a, b), len namiesto súradníc bodu je použitá poloha zadaného objektu…booleanbodVHviezde(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú v hviezde so stredom na aktuálnej pozícii robota, rotovanej v smere robota a rozmerom podľa veľkosti robota.booleanbodVHviezde(double súradnicaBoduX, double súradnicaBoduY, double polomer)Zistí, či sa súradnice zadaného bodu nachádzajú v hviezde so stredom na aktuálnej pozícii robota, rotovanej v smere robota a rozmerom udaným polomerom opísanej kružnice.booleanbodVHviezde(Poloha objekt)Funguje rovnako ako metódabodVHviezde(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
booleanbodVHviezde(Poloha objekt, double polomer)Funguje rovnako ako metódabodVHviezde(x, y, polomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…booleanbodVKruhu(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú v kruhu s polomerom veľkosti robota a stredom na aktuálnej pozícii robota.booleanbodVKruhu(double súradnicaBoduX, double súradnicaBoduY, double polomer)Zistí, či sa súradnice zadaného bodu nachádzajú v kruhu so zadaným polomerom stredom na aktuálnej pozícii robota.booleanbodVKruhu(Poloha objekt)Funguje rovnako ako metódabodVKruhu(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
booleanbodVKruhu(Poloha objekt, double polomer)Funguje rovnako ako metódabodVKruhu(x, y, polomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…booleanbodVObdlzniku(double súradnicaBoduX, double súradnicaBoduY) Alias pre bodVObdĺžniku.booleanbodVObdlzniku(double súradnicaBoduX, double súradnicaBoduY, double pomer) Alias pre bodVObdĺžniku.booleanbodVObdlzniku(double súradnicaBoduX, double súradnicaBoduY, double a, double b) Alias pre bodVObdĺžniku.booleanbodVObdlzniku(Poloha objekt) Alias pre bodVObdĺžniku.booleanbodVObdlzniku(Poloha objekt, double pomer) Alias pre bodVObdĺžniku.booleanbodVObdlzniku(Poloha objekt, double a, double b) Alias pre bodVObdĺžniku.booleanbodVObdĺžniku(double súradnicaBoduX, double súradnicaBoduY)booleanbodVObdĺžniku(double súradnicaBoduX, double súradnicaBoduY, double pomer)Zistí, či sa súradnice zadaného bodu nachádzajú v obdĺžniku so stredom na aktuálnej pozícii robota, rotovanom v smere robota a s rozmermi podľa veľkosti robota a zadaného pomeru strán.booleanbodVObdĺžniku(double súradnicaBoduX, double súradnicaBoduY, double a, double b)Zistí, či sa súradnice zadaného bodu nachádzajú v obdĺžniku so stredom na aktuálnej pozícii robota, rotovanom v smere robota a s rozmermi udanými ako poloosi vpísanej elipsy.booleanbodVObdĺžniku(Poloha objekt)Funguje rovnako ako metódabodVObdĺžniku(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
booleanbodVObdĺžniku(Poloha objekt, double pomer)Funguje rovnako ako metódabodVObdĺžniku(x, y, pomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
booleanbodVObdĺžniku(Poloha objekt, double a, double b)Funguje rovnako ako metódabodVObdĺžniku(x, y, a, b), len namiesto súradníc bodu je použitá poloha zadaného objektu…booleanbodVOblasti(double súradnicaBoduX, double súradnicaBoduY, Area oblasť)Zistí, či sa súradnice zadaného bodu nachádzajú v zadanej oblasti, ktorá je na účely porovnania rotovaná podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť) a posunutá o súradnice robota na plátne (stred sa nachádza v bode [0, 0] – v strede plátna; ak je robot v strede plátna, poloha oblasti sa nezmení).booleanbodVOblasti(Poloha objekt, Area oblasť)Funguje rovnako ako metódabodVOblasti(x, y, oblasť), len namiesto súradníc bodu je použitá poloha zadaného objektu… Metóda berie do úvahy aj aktuálnu mierku robota.booleanbodVoStvorci(double súradnicaBoduX, double súradnicaBoduY) Alias pre bodVoŠtvorci.booleanbodVoStvorci(double súradnicaBoduX, double súradnicaBoduY, double polomer) Alias pre bodVoŠtvorci.booleanbodVoStvorci(Poloha objekt) Alias pre bodVoŠtvorci.booleanbodVoStvorci(Poloha objekt, double polomer) Alias pre bodVoŠtvorci.booleanbodVoŠtvorci(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú vo štvorci so stredom na aktuálnej pozícii robota, rotovanom v smere robota a rozmerom podľa veľkosti robota.booleanbodVoŠtvorci(double súradnicaBoduX, double súradnicaBoduY, double polomer)Zistí, či sa súradnice zadaného bodu nachádzajú vo štvorci so stredom na aktuálnej pozícii robota, rotovanom v smere robota a rozmerom udaným polomerom vpísanej kružnice.booleanbodVoŠtvorci(Poloha objekt)Funguje rovnako ako metódabodVoŠtvorci(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
booleanbodVoŠtvorci(Poloha objekt, double polomer)Funguje rovnako ako metódabodVoŠtvorci(x, y, polomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…booleanbodVPosobisku(double súradnicaBoduX, double súradnicaBoduY) Alias pre bodVPôsobisku.booleanbodVPosobisku(Poloha objekt) Alias pre bodVPôsobisku.booleanbodVPôsobisku(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa aktuálne súradnice zadaného bodu nachádzajú v oblasti obdĺžnika, v rámci ktorého bolo zaznamenané kreslenie aktuálnym robotom.booleanbodVPôsobisku(Poloha objekt)Funguje rovnako ako metódabodVPôsobisku(x, y), len namiesto súradníc bodu je použitá poloha zadaného robota…booleanbodVTvare(double súradnicaBoduX, double súradnicaBoduY, Shape tvar)Zistí, či sa súradnice zadaného bodu nachádzajú v zadanom tvare[1].booleanbodVTvare(Poloha objekt, Shape tvar)Funguje rovnako ako metódabodVTvare(x, y, tvar), len namiesto súradníc bodu je použitá poloha zadaného objektu…Shapecesta()Ukončí záznam cesty (ak prebieha) a vráti cestu ako tvar.Shapecestu() Alias pre cesta.Shapecesty() Alias pre cesta.Strokeciara() Alias pre čiara.voidciara(Stroke nováČiara) Alias pre čiara.Bodciel() Alias pre cieľ.Bodcieľ()Vráti polohu naposledy definovaného cieľa.voidciel(double x, double y) Alias pre cieľ.voidcieľ(double x, double y)Zapne automatické smerovanie do cieľa.voidciel(double x, double y, boolean spusti) Alias pre cieľ.voidcieľ(double x, double y, boolean spusti)Metóda má rovnaký účel ako metódacieľ(x, y)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný).voidciel(double x, double y, boolean spusti, boolean zastavVCieli) Alias pre cieľ.voidcieľ(double x, double y, boolean spusti, boolean zastavVCieli)Metóda má rovnaký účel ako metódacieľ(x, y)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný) a či má zastaviť po dosiahnutí cieľa.voidciel(Poloha objekt) Alias pre cieľ.voidcieľ(Poloha objekt)Zapne automatické smerovanie do cieľa.voidciel(Poloha objekt, boolean spusti) Alias pre cieľ.voidcieľ(Poloha objekt, boolean spusti)Metóda má rovnaký účel ako metódacieľ(Poloha)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť tento robot automaticky spustený (aktivovaný).voidciel(Poloha objekt, boolean spusti, boolean zastavVCieli) Alias pre cieľ.voidcieľ(Poloha objekt, boolean spusti, boolean zastavVCieli)Metóda má rovnaký účel ako metódacieľ(Poloha)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť tento robot automaticky spustený (aktivovaný) a či má zastaviť po dosiahnutí cieľa.voidciel(Shape tvar) Alias pre cieľ.voidcieľ(Shape tvar)Zapne automatické smerovanie do cieľa, ktorý je určený stredom hraníc[1] zadaného tvaru Javy (Shape).voidciel(Shape tvar, boolean spusti) Alias pre cieľ.voidcieľ(Shape tvar, boolean spusti)Metóda má rovnaký účel ako metódacieľ(tvar)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný).voidciel(Shape tvar, boolean spusti, boolean zastavVCieli) Alias pre cieľ.voidcieľ(Shape tvar, boolean spusti, boolean zastavVCieli)Metóda má rovnaký účel ako metódacieľ(tvar)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný) a či má zastaviť po dosiahnutí cieľa.booleancielAktivny() Alias pre cieľAktívny.booleancieľAktívny()Zistí, či je robot práve v režime smerovania do cieľa.voidcielNaMys() Alias pre cieľNaMyš.voidcielNaMys(boolean spusti) Alias pre cieľNaMyš.voidcielNaMys(boolean spusti, boolean zastavVCieli) Alias pre cieľNaMyš.voidcieľNaMyš()Zapne automatické smerovanie do cieľa, ktorý bude určený aktuálnymi súradnicami myši.voidcieľNaMyš(boolean spusti)Metóda má rovnaký účel ako metódacieľNaMyš()(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný).voidcieľNaMyš(boolean spusti, boolean zastavVCieli)Metóda má rovnaký účel ako metódacieľNaMyš()(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný) a či má zastaviť po dosiahnutí cieľa.FarbacielovaFarba() Alias pre cieľováFarba.FarbacieľováFarba() Číta cieľovú farbu robota.voidcielovaFarba(Color nováFarba) Alias pre cieľováFarba.voidcieľováFarba(Color nováFarba) Nastaví cieľovú farbu
(a priehľadnosť) robota podľa použitého objektu
Color(alebo odvodeného napr.voidcielovaFarba(Farebnosť podľaObjektu) Alias pre cieľováFarba.voidcieľováFarba(Farebnosť podľaObjektu)Nastaví cieľovú farbu a priehľadnosť robota podľa zadaného objektu, ktorý musí byť implementáciou rozhraniaFarebnosť.FarbacielovaFarba(int r, int g, int b) Alias pre cieľováFarba.FarbacieľováFarba(int r, int g, int b)Nastaví cieľovú farbu robota podľa zadaných farebných zložiek.FarbacielovaFarba(int r, int g, int b, int a) Alias pre cieľováFarba.FarbacieľováFarba(int r, int g, int b, int a)Nastaví cieľovú farbu robota a priehľadnosť robota podľa zadaných farebných zložiek a úrovne priehľadnosti.FarbacielovaFarbaDoma() Alias pre cieľováFarbaDoma.FarbacieľováFarbaDoma()Zistí, ako sa mení cieľová farba po prechode robota domov.voidcielovaFarbaDoma(Color nováFarba) Alias pre cieľováFarbaDoma.voidcieľováFarbaDoma(Color nováFarba)Zmení nastavenie cieľovej farby robota po jeho prechode domov.voidcielovaFarbaDoma(Farebnosť podľaObjektu) Alias pre cieľováFarbaDoma.voidcieľováFarbaDoma(Farebnosť podľaObjektu)Zmení nastavenie cieľovej farby robota po jeho prechode domov.FarbacielovaFarbaDoma(int r, int g, int b) Alias pre cieľováFarbaDoma.FarbacieľováFarbaDoma(int r, int g, int b)Nastaví cieľovú farbu robota po jeho prechode domov.FarbacielovaFarbaDoma(int r, int g, int b, int a) Alias pre cieľováFarbaDoma.FarbacieľováFarbaDoma(int r, int g, int b, int a)Nastaví cieľovú farbu robota po jeho prechode domov.doublecielX() Alias pre cieľX.doublecieľX()Vráti x-ovú súradnicu naposledy definovaného cieľa.doublecielY() Alias pre cieľY.doublecieľY()Vráti y-ovú súradnicu naposledy definovaného cieľa.voidcitajKonfiguraciu(Súbor subor) Alias pre čítajKonfiguráciu.voidcitajZoSuboru(Súbor súbor) Alias pre čítajZoSúboru.Strokečiara()Vráti objekt typuStrokevyjadrujúci vlastnosti aktuálnej čiary, ktorou robot kreslí.voidčiara(Stroke nováČiara)Podľa zadaného objekt typuStrokenastaví novú čiaru, ktorou bude robot kresliť.voidčítajKonfiguráciu(Súbor súbor)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidčítajZoSúboru(Súbor súbor)Prečíta vlastnosti robota zo zadaného súboru.GRobot.SpojnicadajSpojnicu(GRobot cieľ)Vráti inštanciu jestvujúcej spojnice medzi týmto a zadaným robotom alebo vráti hodnotunull, ak spojnica nejestvuje.voiddeaktivacia() Alias pre deaktivácia.voiddeaktivácia()Táto metóda je predvolene prázdna.voiddeaktivaciaOkna() Alias pre deaktiváciaOkna.voiddeaktiváciaOkna()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voiddeaktivuj()Deaktivuje robot (napríklad po skončení trvania aktivity).voiddeaktivuj(boolean ajČasovač)Metóda má rovnaký účel ako metódadeaktivuj()s tým, že dovoľuje programátorovi určiť, či má byť automaticky spustený časovač (ak nie je v činnosti).voiddeaktivuj(int trvaniePasivity)Metóda má rovnaký účel ako metódadeaktivuj(), ibaže dovoľuje programátorovi určiť trvanie pasivity.voiddeaktivuj(int trvaniePasivity, boolean ajČasovač)Metóda spája funkcionalitu metóddeaktivuj(trvaniePasivity)adeaktivuj(ajČasovač).voiddokreslenie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voiddolava() Alias pre doľava.voiddoľava() Alias pre vľavo.voiddolava(double uhol) Alias pre doľava.voiddoľava(double uhol) Alias pre vľavo.doubledomaX() Zistí aktuálnu x-ovú súradnicu
domovskej pozície robota.voiddomaX(double x) Nastaví aktuálnu x-ovú súradnicu
domovskej pozície robota.doubledomaY() Zistí aktuálnu y-ovú súradnicu
domovskej pozície robota.voiddomaY(double y) Nastaví aktuálnu y-ovú súradnicu
domovskej pozície robota.voiddomov()Presunie robot „domov“ – na štartovaciu pozíciu a obráti ho predvoleným smerom.voiddomov(Častica častica)Presne akodomov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu, smer a rozmer (resp. domovskú veľkosť a domovský pomer veľkosti robota).voiddomov(double novýUholDoma)Presne akodomov, len s tým rozdielom, že robotu nastaví nový štartovací smer.voiddomov(double novéXDoma, double novéYDoma)Presne akodomov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu.voiddomov(double novéXDoma, double novéYDoma, double novýUholDoma)Presne akodomov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu a smer.voiddomov(double novéXDoma, double novéYDoma, Smer novýSmerDoma)Presne akodomov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu a smer.voiddomov(GRobot iný)Prevezme všetky parametre domovskej pozície od zadaného robota a zároveň ich aplikuje.voiddomov(Poloha nováPolohaDoma)Presne akodomov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu.voiddomov(Poloha nováPolohaDoma, double novýUholDoma)Presne akodomov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu a smer.voiddomov(Poloha nováPolohaDoma, Smer novýSmerDoma)Presne akodomov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu a smer.voiddomov(Smer novýSmerDoma)Presne akodomov, len s tým rozdielom, že robotu nastaví nový štartovací smer.voiddoprava() Alias pre vpravo.voiddoprava(double uhol) Alias pre vpravo.voiddopredu()Prikáže robotu, aby sa posunul v aktuálnom smere dopredu o hodnotu svojej veľkosti.voiddopredu(double dĺžka)Prikáže robotu, aby sa posunul dopredu o zadanú dĺžku v aktuálnom smere.voiddosiahnutieCiela() Alias pre dosiahnutieCieľa.voiddosiahnutieCieľa()Táto metóda je predvolene prázdna.voiddozadu() Alias pre vzad.voiddozadu(double dĺžka) Alias pre vzad.Zoznam<Bod>draha() Alias pre dráha.Zoznam<Bod>dráha() Vráti zoznam bodov tvoriaci
aktuálnu dráhu.voiddraha(Vector<Bod> nováDráha) Alias pre dráha.voiddráha(Vector<Bod> nováDráha) Nastaví aktuálnu dráhu podľa zadaného
zoznamu.Shapeelipsa()Nakreslí alebo vyplní na mieste robota elipsu pootočenú v smere robota s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeru.Shapeelipsa(double pomer)Nakreslí alebo vyplní na mieste robota elipsu pootočenú v smere robota s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeru.Shapeelipsa(double a, double b)Nakreslí alebo vyplní na mieste robota elipsu so zadanými rozmermi pootočenú v smere robota (predvolený smer robota je 90°).Shapeelipsu() Alias pre elipsa.Shapeelipsu(double pomer) Alias pre elipsa.Shapeelipsu(double a, double b) Alias pre elipsa.Shapeelipsy() Alias pre elipsa.Shapeelipsy(double pomer) Alias pre elipsa.Shapeelipsy(double a, double b) Alias pre elipsa.StringF(double číslo, int desatinné)Táto metóda slúži na jednoduché formátovanie reálnych čísiel.StringF(double číslo, int šírka, int desatinné)Táto metóda slúži na jednoduché formátovanie reálnych čísiel.Farbafarba() Číta farbu robota.voidfarba(Color nováFarba) Nastav farbu robota.voidfarba(Farebnosť podľaObjektu)Nastaví farbu a priehľadnosť robota podľa zadaného objektu, ktorý musí byť implementáciou rozhraniaFarebnosť.Farbafarba(int r, int g, int b)Nastav farbu robota.Farbafarba(int r, int g, int b, int a)Nastav farbu robota.ColorfarbaAktivnehoSlova(String slovo) Alias pre farbaAktívnehoSlova.ColorfarbaAktívnehoSlova(String slovo)Táto metóda je predvolene prázdna, resp. predvolene vracia hodnotunull.FarbafarbaBodu()Zistí farbu bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí.booleanfarbaBodu(Color farba)Zistí, či farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí je zhodná so zadanou farbou.booleanfarbaBodu(Farebnosť objekt)Zistí, či farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí je zhodná s farbou zadaného objektu.booleanfarbaBodu(int r, int g, int b)Zistí, či farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí je zhodná s farbou zadanou prostredníctvom farebných zložiek.booleanfarbaBodu(int r, int g, int b, int a)Zistí, či farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí je zhodná s farbou zadanou prostredníctvom farebných zložiek a úrovne priehľadnosti.FarbafarbaDoma()Zistí, ako sa mení farba po prechode robota domov.voidfarbaDoma(Color nováFarba)Nastaví alebo zruší ovplyvňovanie farby robota po jeho prechode domov.voidfarbaDoma(Farebnosť podľaObjektu)Nastaví alebo zruší ovplyvňovanie farby robota po jeho prechode domov.FarbafarbaDoma(int r, int g, int b)Nastaví ovplyvňovanie farby robota po jeho prechode domov.FarbafarbaDoma(int r, int g, int b, int a)Nastaví ovplyvňovanie farby robota po jeho prechode domov.FarbafarbaNaMysi() Alias pre farbaNaMyši.booleanfarbaNaMysi(Color farba) Alias pre farbaNaMyši.booleanfarbaNaMysi(Farebnosť objekt) Alias pre farbaNaMyši.booleanfarbaNaMysi(int r, int g, int b) Alias pre farbaNaMyši.booleanfarbaNaMysi(int r, int g, int b, int a) Alias pre farbaNaMyši.FarbafarbaNaMyši()Zistí farbu bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši.booleanfarbaNaMyši(Color farba)Zistí, či je farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši zhodná so zadanou farbou.booleanfarbaNaMyši(Farebnosť objekt)Zistí, či je farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši zhodná s farbou zadaného objektu.booleanfarbaNaMyši(int r, int g, int b)Zistí, či je farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši zhodná s farbou zadanou prostredníctvom farebných zložiek.booleanfarbaNaMyši(int r, int g, int b, int a)Zistí, či je farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši zhodná s farbou zadanou prostredníctvom farebných zložiek a úrovne priehľadnosti.intfazaDrahy() Alias pre fázaDráhy.intfázaDráhy()Zistí aktuálnu fázu pohybu robota po dráhe.voidfazaDrahy(int nováFáza) Alias pre fázaDráhy.voidfázaDráhy(int nováFáza)Zmení fázu pohybu robota po dráhe.Graphics2Dgrafika()Vráti (na technické účely) aktuálny grafický objekt používaný týmto robotom.Doublegyroskop()Zistí aktuálny stav gyroskopického vyvažovania.voidgyroskop(Double hodnota)Nastaví novú hodnotu gyroskopického vyvažovania.double[]hraniceOhranicenia() Alias pre hraniceOhraničenia.double[]hraniceOhraničenia()Táto metóda vráti pole hraníc alebo hodnotunull.doublehrubkaCiary() Alias pre hrúbkaČiary.voidhrubkaCiary(double nováHrúbka) Alias pre hrúbkaČiary.DoublehrubkaCiaryDoma() Alias pre hrúbkaPeraDoma.voidhrubkaCiaryDoma(Double nováHrúbka) Alias pre hrúbkaPeraDoma.doublehrúbkaČiary() Čítaj hrúbku čiary pera robota.voidhrúbkaČiary(double nováHrúbka) Nastav konkrétnu hrúbku čiary pera.DoublehrúbkaČiaryDoma()Zistí, ako sa mení hrúbka pera po prechode robota domov.voidhrúbkaČiaryDoma(Double nováHrúbka)Nastaví alebo zruší ovplyvňovanie hrúbky pera po prechode robota domov.doublehrubkaPera() Alias pre hrúbkaPera.doublehrúbkaPera() Čítaj hrúbku čiary pera robota.voidhrubkaPera(double nováHrúbka) Alias pre hrúbkaPera.voidhrúbkaPera(double nováHrúbka) Nastav konkrétnu hrúbku čiary pera.DoublehrubkaPeraDoma() Alias pre hrúbkaPeraDoma.DoublehrúbkaPeraDoma()Zistí, ako sa mení hrúbka pera po prechode robota domov.voidhrubkaPeraDoma(Double nováHrúbka) Alias pre hrúbkaPeraDoma.voidhrúbkaPeraDoma(Double nováHrúbka)Nastaví alebo zruší ovplyvňovanie hrúbky pera po prechode robota domov.Shapehviezda()Nakreslí alebo vyplní na mieste robota hviezdu určenú rozmerom opísanej kružnice s polomerom veľkosti robota a obrátenú v smere robota.Shapehviezda(double polomer)Nakreslí alebo vyplní na mieste robota päťcípu hviezdu určenú rozmerom opísanej kružnice a orientovanú v smere robota.Shapehviezdu() Alias pre hviezda.Shapehviezdu(double polomer) Alias pre hviezda.Shapehviezdy() Alias pre hviezda.Shapehviezdy(double polomer) Alias pre hviezda.voidchod(double Δx, double Δy) Alias pre choď.voidchoď(double Δx, double Δy)Prikáže robotu, aby sa posunul o zadané súradnice v horizontálnom a vertikálnom smere.voidchod(Poloha poloha) Alias pre choď.voidchoď(Poloha poloha)Prikáže robotu, aby sa posunul (prešiel) o súradnice, ktoré obsahuje zadaná inštancia polohy.voidchodNa(double novéX, double novéY) Alias pre choďNa.voidchoďNa(double novéX, double novéY)Prikáže robotu, aby prešiel na konkrétne súradnice na podlahe (strope).voidchodNa(Poloha objekt) Alias pre choďNa.voidchoďNa(Poloha objekt)Prikáže tomuto robotu, aby prešiel na polohu zadaného objektu.voidchodNa(Shape tvar) Alias pre choďNa.voidchoďNa(Shape tvar)Prikáže robotu, aby prešiel do stredu hraníc[1] zadaného tvaru.voidchodNaCiel() Alias pre choďNaCieľ.voidchoďNaCieľ()Prikáže robotu, aby na podlahe (strope) prešiel na aktuálne súradnice cieľa.voidchodNaMys() Alias pre choďNaMyš.voidchoďNaMyš()Prikáže robotu, aby na podlahe (strope) prešiel na aktuálne súradnice myši.voidchodNaPoObluku(double x, double y) Alias pre choďNaPoOblúku.voidchoďNaPoOblúku(double x, double y)Pohne robotom po oblúku do cieľového bodu určeného súradnicami [x, y] s ohľadom na aktuálne otočenie robota.voidchodNaPoObluku(Poloha poloha) Alias pre choďNaPoOblúku.voidchoďNaPoOblúku(Poloha poloha)Funguje rovnako akochoďNaPoOblúku(x, y), ale namiesto samostatných súradníc prijíma implementáciu rozhraniaPoloha(napríkladBod).voidchodNaPootoceny(double x, double y, double uhol) Alias pre choďNaPootočený.voidchodNaPootoceny(double x, double y, Smer smer) Alias pre choďNaPootočený.voidchodNaPootoceny(Poloha poloha, double uhol) Alias pre choďNaPootočený.voidchodNaPootoceny(Poloha poloha, Smer smer) Alias pre choďNaPootočený.voidchoďNaPootočený(double x, double y, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota.voidchoďNaPootočený(double x, double y, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota.voidchoďNaPootočený(Poloha poloha, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota.voidchoďNaPootočený(Poloha poloha, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota.voidchodPoObluku() Alias pre choďPoOblúku.voidchoďPoOblúku()Pohne robotom po oblúku s polomerom rovným veľkosti robota o aktuálny uhol otáčania a v prípade, že je položené pero, tak oblúk aj nakreslí.voidchodPoObluku(boolean vpravo) Alias pre choďPoOblúku.voidchoďPoOblúku(boolean vpravo)Pohne robotom po oblúku s polomerom rovným veľkosti robota o aktuálny uhol otáčania a v prípade, že je položené pero, tak oblúk aj nakreslí.voidchodPoObluku(double uhol) Alias pre choďPoOblúku.voidchoďPoOblúku(double uhol)Pohne robotom po oblúku s polomerom rovným veľkosti robota o zadaný uhol a v prípade, že je položené pero, tak oblúk aj nakreslí.voidchodPoObluku(double uhol, boolean vpravo) Alias pre choďPoOblúku.voidchoďPoOblúku(double uhol, boolean vpravo)Pohne robotom po oblúku s polomerom rovným veľkosti robota o zadaný uhol a v prípade, že je položené pero, tak oblúk aj nakreslí.voidchodPoObluku(double uhol, double polomer) Alias pre choďPoOblúku.voidchoďPoOblúku(double uhol, double polomer)Pohne robotom po oblúku so zadaným polomerom o zadaný uhol a v prípade, že je položené pero, tak oblúk aj nakreslí.voidchodPootoceny(double Δx, double Δy, double uhol) Alias pre choďPootočený.voidchodPootoceny(double Δx, double Δy, Smer smer) Alias pre choďPootočený.voidchoďPootočený(double Δx, double Δy, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných relatívnych súradníc o zadaný uhol.voidchoďPootočený(double Δx, double Δy, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných relatívnych súradníc o zadaný uhol.booleaninteraktivnyRezim() Alias pre interaktívnyRežim.voidinteraktivnyRezim(boolean zapni) Alias pre interaktívnyRežim.booleaninteraktívnyRežim()Zistí stav interaktívneho režimu pre tento robot.voidinteraktívnyRežim(boolean zapni)Zapne alebo vypne interaktívny režim pre tento robot.booleanjeNa(double x, double y)Overí, či sa poloha tohto robota dokonale zhoduje so zadanými súradnicami.booleanjeNa(Poloha poloha)Overí, či sa poloha tohto robota a poloha zadaného objektu dokonale zhodujú.booleanjeNad(GRobot ktorý) Alias pre somZa.booleanjePod(GRobot ktorý) Alias pre somPred.booleanjePred(GRobot ktorý) Alias pre somZa.booleanjePredvolenyTvarVyplneny() Alias pre jePredvolenýTvarVyplnený.booleanjePredvolenýTvarVyplnený()Overí spôsob kreslenia predvoleného tvaru trojzubca.booleanjeRegistrovany() Alias pre jeRegistrovaný.booleanjeRegistrovaný()Overí, či je tento robot registrovaný v konfigurácii sveta.booleanjeSpojnica(GRobot cieľ)Zistí, či medzi týmto a zadaným robotom jestvuje spojnica smerujúca od tohto robota.booleanjeZa(GRobot ktorý) Alias pre somPred.voidklavesovaSkratka() Alias pre klávesováSkratka.voidklávesováSkratka()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidklik()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.booleankoliduje(GRobot iný)Zistí, či tento a zadaný robot vzájomne „kolidujú,“ t. j. či nastala ich vzájomná „zrážka“ alebo nie.OblastkoliznaOblast() Alias pre kolíznaOblasť.OblasťkolíznaOblasť() Vráti objekt aktívnej kolíznej oblasti
tohto robota alebo null, ak oblasť nebola definovaná.voidkoliznaOblast(Shape podľaTvaru) Alias pre kolíznaOblasť.voidkolíznaOblasť(Shape podľaTvaru) S pomocou zadaného tvaru definuje
novú kolíznu oblasť, ktorú bude od tohto okamihu využívať
robot na detekciu kolízií pomocou metódy koliduje.booleankonfiguraciaZmenena() Alias pre konfiguráciaZmenená.booleankonfiguráciaZmenená()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidkoniecDrahy() Alias pre koniecDráhy.voidkoniecDráhy()Táto metóda je predvolene prázdna.voidkoniecVstupu()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidkopirujSpojnice(GRobot odKtorého) Alias pre kopírujSpojnice.voidkopírujSpojnice(GRobot odKtorého)Skopíruje (alebo aktualizuje) všetky spojnice podľa zadaného robota.voidkracajPoDrahe() Alias pre kráčajPoDráhe.booleankracamPoDrahe() Alias pre kráčamPoDráhe.voidkracaniePoDrahe() Alias pre kráčaniePoDráhe.voidkráčajPoDráhe()Aktivuje robot a zaháji jeho pohyb po aktuálnej dráhe.booleankráčamPoDráhe()Metóda zistí, či sa robot práve nachádza v režime kráčania po dráhe.voidkráčaniePoDráhe()Táto metóda je predvolene prázdna.booleankreslenieTvarovPovolene() Alias pre kreslímTvary.booleankreslenieTvarovPovolené() Alias pre kreslímTvary.voidkresliCestu()Ukončí záznam cesty (ak prebieha) a nakreslí zaznamenanú cestu aktuálnou farbou a hrúbkou čiary.voidkresliDo(Shape tvar)Obmedzí akékoľvek kreslenie na aktívne plátno robota (podlahu alebo strop) na plochu zadaného útvaru (Shape).voidkresliDoObrazka(Obrázok obrázok) Alias pre kresliNaObrázok.voidkresliDoObrázka(Obrázok obrázok) Alias pre kresliNaObrázok.ShapekresliElipsu()Nakreslí na mieste robota elipsu pootočenú v smere robota s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeruShapekresliElipsu(double pomer)Nakreslí na mieste robota elipsu pootočenú v smere robota s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeruShapekresliElipsu(double a, double b)Nakreslí na mieste robota elipsu so zadanými rozmermi pootočenú v smere robota (predvolený smer robota je 90°)ShapekresliHviezdu()Nakreslí na mieste robota hviezdu určenú rozmerom opísanej kružnice s polomerom veľkosti robota a obrátenú v smere robotaShapekresliHviezdu(double polomer)Nakreslí na mieste robota päťcípu hviezdu určenú rozmerom opísanej kružnice a orientovanú v smere robotaObrázokkreslimDoObrazka() Alias pre kreslímNaObrázok.ObrázokkreslímDoObrázka() Alias pre kreslímNaObrázok.booleankreslimDoObrazka(Obrázok obrázok) Alias pre kreslímNaObrázok.booleankreslímDoObrázka(Obrázok obrázok) Alias pre kreslímNaObrázok.ObrázokkreslimNaObrazok() Alias pre kreslímNaObrázok.ObrázokkreslímNaObrázok()Ak je kreslenie tohto robota presmerované do obrázka (inštancie triedyObrázok), tak táto metóda túto inštanciu vráti.booleankreslimNaObrazok(Obrázok obrázok) Alias pre kreslímNaObrázok.booleankreslímNaObrázok(Obrázok obrázok)Zistí, či je kreslenie tohto robota presmerované do určeného obrázka.booleankreslimNaPodlahu() Alias pre kreslímNaPodlahu.booleankreslímNaPodlahu()Overí, či tento robot kreslí na podlahu, teda, či je podlaha aktívnym plátnom robota.booleankreslimNaStrop() Alias pre kreslímNaStrop.booleankreslímNaStrop()Overí, či tento robot kreslí na strop, teda, či je strop aktívnym plátnom robota.booleankreslimTvary() Alias pre kreslímTvary.booleankreslímTvary()Zistí, či je kreslenie tvarov povolené alebo zakázané.voidkresliNaObrazok(Obrázok obrázok) Alias pre kresliNaObrázok.voidkresliNaObrázok(Obrázok obrázok)Presmeruje kreslenie tohto robota do určeného obrázka.voidkresliNaPodlahu()Po použití tejto metódy bude tento robot kresliť na plátno podlahy (predvolený stav).voidkresliNaStrop()Po použití tejto metódy bude tento robot kresliť na plátno stropu.ShapekresliObdlznik() Alias pre kresliObdĺžnik.ShapekresliObdlznik(double pomer) Alias pre kresliObdĺžnik.ShapekresliObdlznik(double a, double b) Alias pre kresliObdĺžnik.ShapekresliObdĺžnik()Nakreslí na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robotaShapekresliObdĺžnik(double pomer)Nakreslí na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robotaShapekresliObdĺžnik(double a, double b)Nakreslí na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota (predvolený smer robota je 90°)voidkresliPosobisko() Alias pre kresliPôsobisko.voidkresliPosobisko(boolean ánoNie) Alias pre kresliPôsobisko.voidkresliPôsobisko()Zvýrazní oblasť obdĺžnika – pôsobisko, v rámci ktorého robot kreslil od posledného vymazania pôsobiska alebo od posledného použitia niektorej z metóddomov.voidkresliPôsobisko(boolean ánoNie)Zapne alebo vypne kreslenie tzv. pôsobiska – oblasti, v rámci ktorej robot kreslil od posledného vymazania pôsobiska alebo od posledného použitia niektorej z metóddomov.voidkresliSeba()Táto metóda je predvolene prázdna.ShapekresliStvorec() Alias pre kresliŠtvorec.ShapekresliStvorec(double polomer) Alias pre kresliŠtvorec.ShapekresliŠtvorec()Nakreslí na mieste robota štvorec určený rozmerom vpísanej kružnice s polomerom veľkosti robota a obrátený v smere robotaShapekresliŠtvorec(double polomer)Nakreslí na mieste robota štvorec určený rozmerom vpísanej kružnice a obrátený v smere robotavoidkresliTvar()Táto metóda je predvolene prázdna.ShapekresliTvar(Shape tvar)Nakreslí čiaru podľa zadaného tvaru (hrúbkou a farbou čiary nastavenou pre tento robot).ShapekresliTvar(Shape tvar, boolean upravRobotom)Nakreslí čiaru podľa zadaného tvaru (hrúbkou a farbou čiary nastavenou pre tento robot).voidkresliTvary()Povolí kreslenie tvarov a písanie textov robotom (predvolený stav).voidkresliUtvary() Alias pre kresliTvary.voidkresliÚtvary() Alias pre kresliTvary.voidkresliVsade() Alias pre kresliVšade.voidkresliVšade()Zruší oblasť na obmedzenie kreslenia na aktívne plátno (podlahu, strop alebo obrázok, do ktorého má robot presmerované kreslenie).booleankresliZaznamCesty() Alias pre kresliZáznamCesty.booleankresliZáznamCesty()Overí, či je zapnuté kreslenie priebehu zaznamenávania cesty.voidkresliZaznamCesty(boolean kresli) Alias pre kresliZáznamCesty.voidkresliZáznamCesty(boolean kresli)Zapne alebo vypne kreslenie priebehu zaznamenávania cesty.Shapekruh()Nakreslí na mieste robota kruh s polomerom veľkosti robotaShapekruh(double polomer)Nakreslí na mieste robota kruh so zadaným polomeromShapekruhu() Alias pre kruh.Shapekruhu(double polomer) Alias pre kruh.Shapekruzka() Alias pre krúžok.Shapekruzka(double polomer) Alias pre krúžok.Shapekruznica() Alias pre kružnica.Shapekruznica(double polomer) Alias pre kružnica.Shapekruznice() Alias pre kružnica.Shapekruznice(double polomer) Alias pre kružnica.Shapekruznicu() Alias pre kružnica.Shapekruznicu(double polomer) Alias pre kružnica.Shapekruzok() Alias pre krúžok.Shapekruzok(double polomer) Alias pre krúžok.Shapekrúžka() Alias pre krúžok.Shapekrúžka(double polomer) Alias pre krúžok.Shapekružnica()Nakreslí na mieste robota kružnicu s polomerom veľkosti robotaShapekružnica(double polomer)Nakreslí na mieste robota kružnicu so zadaným polomeromShapekružnice() Alias pre kružnica.Shapekružnice(double polomer) Alias pre kružnica.Shapekružnicu() Alias pre kružnica.Shapekružnicu(double polomer) Alias pre kružnica.Shapekrúžok()Nakreslí na mieste robota kruh alebo kružnicu s polomerom veľkosti robota.Shapekrúžok(double polomer)Nakreslí na mieste robota kružnicu alebo kruh so zadaným polomerom.Shapelupene(double polomer, int n, double odklon, String... nastavenia)Nakreslí n lupeňov umiestnených na pomyselnej kružnici so zadaným polomerom.Zoznam<Double>mapaSmerov() Vráti zoznam hodnôt tvoriaci aktuálnu mapu
smerov.voidmapaSmerov(Vector<Double> nováMapaSmerov) Nastaví aktuálnu mapu smerov podľa zadaného
zoznamu.booleanmaRozmer(double šírka, double výška) Alias pre máRozmer.booleanmáRozmer(double šírka, double výška)Overí, či sa rozmery robota dokonale zhodujú so zadanými rozmermi.booleanmaRozmer(Rozmer rozmer) Alias pre máRozmer.booleanmáRozmer(Rozmer rozmer)Overí, či sa rozmery robota a rozmery zadaného objektu dokonale zhodujú.booleanmaSirku(double šírka) Alias pre máŠírku.booleanmaSpojnicu(GRobot cieľ) Alias pre jeSpojnica.booleanmáSpojnicu(GRobot cieľ) Alias pre jeSpojnica.booleanmáŠírku(double šírka)Zistí, či má robot zadanú šírku.booleanmaVysku(double výška) Alias pre máVýšku.booleanmáVýšku(double výška)Zistí, či má robot zadanú výšku.voidmaximalizovanie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.doublemaximalnaRychlost() Alias pre maximálnaRýchlosť.doublemaximálnaRýchlosť() Zistí hodnotu maximálnej rýchlosti tohto
robota.voidmaximalnaRychlost(double maximálnaRýchlosť) Alias pre maximálnaRýchlosť.voidmaximálnaRýchlosť(double maximálnaRýchlosť) Nastaví novú hodnotu maximálnej
rýchlosti.doublemaximalnaRychlostOtacania() Alias pre maximálnaUhlováRýchlosť.voidmaximalnaRychlostOtacania(double maximálnaUhlováRýchlosť) Alias pre maximálnaUhlováRýchlosť.doublemaximálnaRýchlosťOtáčania() Alias pre maximálnaUhlováRýchlosť.voidmaximálnaRýchlosťOtáčania(double maximálnaUhlováRýchlosť) Alias pre maximálnaUhlováRýchlosť.doublemaximalnaRychlostPosunu() Alias pre maximálnaRýchlosťPosunu.doublemaximálnaRýchlosťPosunu() Zistí hodnotu maximálnej rýchlosti
posunu tohto robota.voidmaximalnaRychlostPosunu(double maximálnaRýchlosťPosunu) Alias pre maximálnaRýchlosťPosunu.voidmaximálnaRýchlosťPosunu(double maximálnaRýchlosťPosunu) Nastaví novú hodnotu maximálnej
rýchlosti posunu.doublemaximalnaUhlovaRychlost() Alias pre maximálnaUhlováRýchlosť.doublemaximálnaUhlováRýchlosť() Zistí hodnotu maximálnej uhlovej
rýchlosti (maximálnej rýchlosti otáčania) tohto robota.voidmaximalnaUhlovaRychlost(double maximálnaUhlováRýchlosť) Alias pre maximálnaUhlováRýchlosť.voidmaximálnaUhlováRýchlosť(double maximálnaUhlováRýchlosť) Nastaví novú hodnotu maximálnej
uhlovej rýchlosti (rýchlosti otáčania).Stringmeno() Vráti meno robota alebo
nullak robot nemá meno.voidmeno(String novéMeno) Pomenuje alebo zruší meno tohto
robota.doublemierka() Zistí aktuálnu hodnotu mierky robota.voidmierka(double mierka) Upraví aktuálnu mierku robota.doublemierkaPomeru() Zistí aktuálnu hodnotu mierky pomeru
veľkosti robota.voidmierkaPomeru(double mierka) Upraví aktuálnu mierku pomeru
veľkosti tohto robota.voidmimoHranic() Alias pre mimoHraníc.voidmimoHraníc()Táto metóda je predvolene prázdna.booleanmimoHranic(Bod[] poleBodov, double uhol) Alias pre mimoHraníc.booleanmimoHraníc(Bod[] poleBodov, double uhol)Táto metóda je predvolene prázdna.voidminimalizovanie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.booleanmysV() Alias pre myšVKruhu.booleanmysVCeste() Alias pre myšVCeste.booleanmysVElipse() Alias pre mysVElipse.booleanmysVElipse(double pomer) Alias pre mysVElipse.booleanmysVElipse(double a, double b) Alias pre mysVElipse.booleanmysVHviezde() Alias pre myšVHviezde.booleanmysVHviezde(double polomer) Alias pre myšVHviezde.booleanmysVKruhu() Alias pre myšVKruhu.booleanmysVKruhu(double polomer) Alias pre myšVKruhu.booleanmysVObdlzniku() Alias pre myšVObdĺžniku.booleanmysVObdlzniku(double pomer) Alias pre myšVObdĺžniku.booleanmysVObdlzniku(double a, double b) Alias pre myšVObdĺžniku.booleanmysVOblasti(Area oblasť) Alias pre myšVOblasti.booleanmysVoStvorci() Alias pre myšVoŠtvorci.booleanmysVoStvorci(double polomer) Alias pre myšVoŠtvorci.booleanmysVPosobisku() Alias pre myšVPôsobisku.booleanmyšV() Alias pre myšVKruhu.booleanmyšVCeste()Zistí, či sa aktuálne súradnice myši nachádzajú v uzavretej oblasti cesty, ktorá bola zaznamenaná kreslením aktuálneho robota od posledného použitia metódyzačniCestu.booleanmyšVElipse()booleanmyšVElipse(double pomer)Zistí, či sa aktuálne súradnice myši nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi podľa veľkosti robota a zadaného pomeru poloosí.booleanmyšVElipse(double a, double b)Zistí, či sa aktuálne súradnice myši nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi zadaných poloosí.booleanmyšVHviezde()Zistí, či sa aktuálne súradnice myši nachádzajú v hviezde so stredom na aktuálnej pozícii robota, rotovanej v smere robota a rozmerom podľa veľkosti robota.booleanmyšVHviezde(double polomer)Zistí, či sa aktuálne súradnice myši nachádzajú v päťcípej hviezde so stredom na aktuálnej pozícii robota, rotovanej v smere robota a rozmerom udaným prostredníctvom polomeru opísanej kružnice.booleanmyšVKruhu()Zistí, či sa aktuálne súradnice myši nachádzajú v kruhu so stredom na aktuálnej pozícii robota a polomerom s veľkosťou robota.booleanmyšVKruhu(double polomer)Zistí, či sa aktuálne súradnice myši nachádzajú v kruhu so stredom na aktuálnej pozícii robota a zadaným polomerom.booleanmyšVObdĺžniku()booleanmyšVObdĺžniku(double pomer)Zistí, či sa aktuálne súradnice myši nachádzajú v obdĺžniku pootočenom v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi podľa veľkosti robota a zadaného pomeru strán.booleanmyšVObdĺžniku(double a, double b)Zistí, či sa aktuálne súradnice myši nachádzajú v obdĺžniku pootočenom v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi udanými ako poloosi vpísanej elipsy.booleanmyšVOblasti(Area oblasť)Zistí, či sa aktuálne súradnice myši nachádzajú v zadanej oblasti, ktorá je na účely porovnania rotovaná podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť) a posunutá o súradnice robota na plátne (stred sa nachádza v bode [0, 0] – v strede plátna).booleanmyšVoŠtvorci()Zistí, či sa aktuálne súradnice myši nachádzajú vo štvorci so stredom na aktuálnej pozícii robota, rotovanom v smere robota a rozmerom podľa veľkosti robota.booleanmyšVoŠtvorci(double polomer)Zistí, či sa aktuálne súradnice myši nachádzajú vo štvorci so stredom na aktuálnej pozícii robota, rotovanom v smere robota a rozmerom udaným polomerom vpísanej kružnice.booleanmyšVPôsobisku()Zistí, či sa aktuálne súradnice myši nachádzajú v oblasti obdĺžnika, v rámci ktorého bolo zaznamenané kreslenie aktuálnym robotom.voidnad(GRobot ktorého) Alias pre pred.voidnahodnaFarba() Alias pre náhodnáFarba.voidnáhodnáFarba()Zmení farbu robota na náhodnú.voidnahodnaPoloha() Alias pre náhodnáPoloha.voidnáhodnáPoloha()Umiestni robot na náhodnú pozíciu na aktívnom plátne alebo obrázku.voidnahodnaPozicia() Alias pre náhodnáPoloha.voidnáhodnáPozícia() Alias pre náhodnáPoloha.voidnahodnaVelkost(double miera) Alias pre náhodnáVeľkosť.voidnáhodnáVeľkosť(double miera)Zmení veľkosť robota na náhodnú hodnotu v rozmedzí veľkosti, ktorú by mal pri hodnote mierky1.0a násobkom tejto hodnoty o zadanú mieru.voidnahodnyPomer(double miera) Alias pre náhodnýPomer.voidnáhodnýPomer(double miera)Zmení pomer veľkosti robota na náhodnú hodnotu v rozmedzí pomeru veľkosti, ktorú by mal pri hodnote mierky pomeru1.0a násobkom tejto hodnoty o zadanú mieru.voidnahodnyRozmer(double miera) Alias pre náhodnýRozmer.voidnáhodnýRozmer(double miera)Zmení rozmer robota na náhodnú hodnotu v rozmedzí veľkosti a pomeru veľkosti, ktoré by mal pri hodnotách mierok veľkosti a pomeru veľkosti1.0a násobkov týchto hodnôt o zadanú mieru.voidnahodnyRozmer(double mieraVeľkosti, double mieraPomeru) Alias pre náhodnýRozmer.voidnáhodnýRozmer(double mieraVeľkosti, double mieraPomeru)Zmení rozmer robota na náhodnú hodnotu v rozmedzí veľkosti a pomeru veľkosti, ktoré by mal pri hodnotách mierok veľkosti a pomeru veľkosti1.0a násobkov týchto hodnôt o zadané miery prislúchajúcich údajov.voidnahodnySmer() Alias pre náhodnýSmer.voidnáhodnýSmer()Otočí robot náhodným smerom.voidnahodnyUhol() Alias pre náhodnýSmer.voidnáhodnýUhol() Alias pre náhodnýSmer.doublenajvacsiaRychlost() Alias pre maximálnaRýchlosť.voidnajvacsiaRychlost(double najväčšiaRýchlosť) Alias pre maximálnaRýchlosť.doublenajvacsiaRychlostOtacania() Alias pre maximálnaUhlováRýchlosť.voidnajvacsiaRychlostOtacania(double najväčšiaRýchlosťOtáčania) Alias pre maximálnaUhlováRýchlosť.doublenajvacsiaRychlostPosunu() Alias pre maximálnaRýchlosťPosunu.voidnajvacsiaRychlostPosunu(double najväčšiaRýchlosťPosunu) Alias pre maximálnaRýchlosťPosunu.intnajvacsiaSirkaZnaku() Alias pre najväčšiaŠírkaZnaku.doublenajvacsiaUhlovaRychlost() Alias pre maximálnaUhlováRýchlosť.voidnajvacsiaUhlovaRychlost(double najväčšiaUhlováRýchlosť) Alias pre maximálnaUhlováRýchlosť.doublenajväčšiaRýchlosť() Alias pre maximálnaRýchlosť.voidnajväčšiaRýchlosť(double najväčšiaRýchlosť) Alias pre maximálnaRýchlosť.doublenajväčšiaRýchlosťOtáčania() Alias pre maximálnaUhlováRýchlosť.voidnajväčšiaRýchlosťOtáčania(double najväčšiaRýchlosťOtáčania) Alias pre maximálnaUhlováRýchlosť.doublenajväčšiaRýchlosťPosunu() Alias pre maximálnaRýchlosťPosunu.voidnajväčšiaRýchlosťPosunu(double najväčšiaRýchlosťPosunu) Alias pre maximálnaRýchlosťPosunu.intnajväčšiaŠírkaZnaku()Zistí najväčšiu šírku znaku v bodoch pri použití aktuálneho typu písma.doublenajväčšiaUhlováRýchlosť() Alias pre maximálnaUhlováRýchlosť.voidnajväčšiaUhlováRýchlosť(double najväčšiaUhlováRýchlosť) Alias pre maximálnaUhlováRýchlosť.voidnaSpodok()Presunie tento robot do pozadia s ohľadom na umiestnenie robotov do vrstiev.Paintnater() Alias pre náter.Paintnáter()Vráti objekt s aktuálnym druhom náteru, ktorý grafický robot používa na kreslenie (kreslenie čiar pera, vypĺňanie plôch a kreslenie obrysových čiar ním generovaných pečiatkových tvarov, kreslenie svojho predvoleného tvaru, prípadne iné).voidnater(Paint novýNáter) Alias pre náter.voidnáter(Paint novýNáter)Upraví druh náteru, ktorý grafický robot používa na kreslenie (kreslenie čiar pera, vypĺňanie plôch a kreslenie obrysových čiar ním generovaných pečiatkových tvarov, kreslenie svojho predvoleného tvaru, prípadne iné).voidnaVrch()Presunie tento robot do popredia s ohľadom na umiestnenie robotov do vrstiev.booleanneaktivny() Alias pre neaktívny.booleanneaktívny()Overí, či je tento robot neaktívny.voidnekresliDo(Shape tvar)Vytvára obmedzenie na kreslenie na aktívne plátno robota (podlahu, strop alebo obrázok, do ktorého má robot presmerované kreslenie).voidnekresliPosobisko() Alias pre nekresliPôsobisko.voidnekresliPôsobisko()Skryje zvýraznenie oblasti pôsobiska, ktoré bolo zapnuté metódoukresliPôsobisko.voidnekresliTvary()Zakáže kreslenie tvarov (kružnice, elipsy, štvorca, obdĺžnika…) a písanie textu robotom, aby prislúchajúce metódy mohli byť využité na iné účely, napríklad na obmedzenie kreslenia.voidnekresliUtvary() Alias pre nekresliTvary.voidnekresliÚtvary() Alias pre nekresliTvary.voidnepouziKruhovyNater() Alias pre nepoužiKruhovýNáter.voidnepoužiKruhovýNáter()Vypne používanie kruhového náteru výplne tvarov, ktorý by bol použitý v prípade nastavenia cieľovej farby robota.voidnevyplnajTvary() Alias pre nevypĺňajTvary.voidnevypĺňajTvary()Upraví spôsob kreslenia tvarov generovaných robotom.voidnevyplnajUtvary() Alias pre nevypĺňajTvary.voidnevypĺňajÚtvary() Alias pre nevypĺňajTvary.voidnezastavujPoSpomaleni() Alias pre nezastavujPoSpomalení.voidnezastavujPoSpomalení()Zruší príkaz robota, ktorý mu určoval, aby sa najbližšie, keď dosiahne nulovú rýchlosť automaticky zastavil.voidnezastavujPoSpomaleniPosunu() Alias pre nezastavujPoSpomaleníPosunu.voidnezastavujPoSpomaleníPosunu()Zruší robotu príkaz, ktorý mu určoval, aby sa najbližšie, keď dosiahne nulovú rýchlosť posunu automaticky posun zastavil (s nastavením nulového zrýchlenia posunu).ShapenHviezda(double polomer, int n, double parameter, String... nastavenia)Nakreslí n-cípu hviezdu, ktorej cípy ležia na kružnici so zadaným polomerom.voidnizsie() Alias pre nižšie.voidnižšie()Presunie tento robot o úroveň nižšie v rámci poradia kreslenia robotov s ohľadom na umiestnenie robotov do vrstiev.voidnovyDomov() Alias pre novýDomov.voidnovýDomov()Zapamätá si aktuálnu pozíciu a smer ako nový domov.voidnovyDomov(Častica častica) Alias pre novýDomov.voidnovýDomov(Častica častica)Nastaví domovskú polohu a smer robota podľa polohy a smeru zadanej častice.voidnovyDomov(double novýUholDoma) Alias pre novýDomov.voidnovýDomov(double novýUholDoma)Nastaví robotu nový domovský smer.voidnovyDomov(double novéXDoma, double novéYDoma) Alias pre novýDomov.voidnovýDomov(double novéXDoma, double novéYDoma)Nastaví robotu novú domovskú pozíciu.voidnovyDomov(double novéXDoma, double novéYDoma, double novýUholDoma) Alias pre novýDomov.voidnovýDomov(double novéXDoma, double novéYDoma, double novýUholDoma)Nastaví robotu novú domovskú pozíciu a smer.voidnovyDomov(double novéXDoma, double novéYDoma, Smer novýSmerDoma) Alias pre novýDomov.voidnovýDomov(double novéXDoma, double novéYDoma, Smer novýSmerDoma)Nastaví robotu novú domovskú pozíciu a smer.voidnovyDomov(GRobot iný) Alias pre novýDomov.voidnovýDomov(GRobot iný)Prevezme všetky parametre domovskej pozície od zadaného robota.voidnovyDomov(Poloha nováPolohaDoma) Alias pre novýDomov.voidnovýDomov(Poloha nováPolohaDoma)Nastaví robotu novú domovskú pozíciu.voidnovyDomov(Poloha nováPolohaDoma, double novýUholDoma) Alias pre novýDomov.voidnovýDomov(Poloha nováPolohaDoma, double novýUholDoma)Nastaví robotu novú domovskú pozíciu a smer.voidnovyDomov(Poloha nováPolohaDoma, Smer novýSmerDoma) Alias pre novýDomov.voidnovýDomov(Poloha nováPolohaDoma, Smer novýSmerDoma)Nastaví robotu novú domovskú pozíciu a smer.voidnovyDomov(Smer novýSmerDoma) Alias pre novýDomov.voidnovýDomov(Smer novýSmerDoma)Nastaví robotu nový domovský smer.ShapenUholnik(double rozmer, int n, String... nastavenia) Alias pre nUholník.ShapenUholník(double rozmer, int n, String... nastavenia)Nakreslí pravidelný n-uholník.Shapeobdlznik() Alias pre obdĺžnik.Shapeobdlznik(double pomer) Alias pre obdĺžnik.Shapeobdlznik(double a, double b) Alias pre obdĺžnik.Shapeobdlznika() Alias pre obdĺžnik.Shapeobdlznika(double pomer) Alias pre obdĺžnik.Shapeobdlznika(double a, double b) Alias pre obdĺžnik.Shapeobdĺžnik()Nakreslí alebo vyplní na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota.Shapeobdĺžnik(double pomer)Nakreslí alebo vyplní na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota.Shapeobdĺžnik(double a, double b)Nakreslí alebo vyplní na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota (predvolený smer robota je 90°).Shapeobdĺžnika() Alias pre obdĺžnik.Shapeobdĺžnika(double pomer) Alias pre obdĺžnik.Shapeobdĺžnika(double a, double b) Alias pre obdĺžnik.voidobkresliCestu()Táto metóda funguje rovnako ako keby sme volali metódyuzavriCestuakresliCestuza sebou (v uvedenom poradí).voidobkresliOblast(Area oblasť) Alias pre obkresliOblasť.voidobkresliOblasť(Area oblasť)Obkreslí zadanú oblasť hrúbkou a farbou čiary nastavenou pre tento robot.voidobnovenie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidobratDrahu() Alias pre obráťDráhu.voidobráťDráhu()Prevráti poradie bodov dráhy.voidobratMapuSmerov() Alias pre obráťDráhu.voidobráťMapuSmerov()Prevráti poradie prvkov mapy smerov.BufferedImageobrazok() Alias pre obrázok.BufferedImageobrázok()Vráti (na technické účely) aktuálny obrázok, na ktorý tento robot kreslí.voidobrazok(Image obrázok) Alias pre obrázok.voidobrázok(Image obrázok)Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia.voidobrazok(Image obrázok, double mierka) Alias pre obrázok.voidobrázok(Image obrázok, double mierka)Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia.voidobrazok(Image obrázok, double Δx, double Δy) Alias pre obrázok.voidobrázok(Image obrázok, double Δx, double Δy)Nakreslí obrázok v mierke robota na pozícii robota podľa aktuálneho spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(Image obrázok, double Δx, double Δy, double mierka) Alias pre obrázok.voidobrázok(Image obrázok, double Δx, double Δy, double mierka)Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(Image obrázok, int spôsobKreslenia) Alias pre obrázok.voidobrázok(Image obrázok, int spôsobKreslenia)Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia.voidobrazok(Image obrázok, int spôsobKreslenia, double mierka) Alias pre obrázok.voidobrázok(Image obrázok, int spôsobKreslenia, double mierka)Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia.voidobrazok(Image obrázok, int spôsobKreslenia, double Δx, double Δy) Alias pre obrázok.voidobrázok(Image obrázok, int spôsobKreslenia, double Δx, double Δy)Nakreslí obrázok v mierke robota na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(Image obrázok, int spôsobKreslenia, double Δx, double Δy, double mierka) Alias pre obrázok.voidobrázok(Image obrázok, int spôsobKreslenia, double Δx, double Δy, double mierka)Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(Image obrázok, int spôsobKreslenia, double Δx, double Δy, double mierkaX, double mierkaY) Alias pre obrázok.voidobrázok(Image obrázok, int spôsobKreslenia, double Δx, double Δy, double mierkaX, double mierkaY)Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(String súbor) Alias pre obrázok.voidobrázok(String súbor)Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia.voidobrazok(String súbor, double mierka) Alias pre obrázok.voidobrázok(String súbor, double mierka)Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia.voidobrazok(String súbor, double Δx, double Δy) Alias pre obrázok.voidobrázok(String súbor, double Δx, double Δy)Nakreslí obrázok v mierke robota na pozícii robota podľa aktuálneho spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(String súbor, double Δx, double Δy, double mierka) Alias pre obrázok.voidobrázok(String súbor, double Δx, double Δy, double mierka)Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(String súbor, int spôsobKreslenia) Alias pre obrázok.voidobrázok(String súbor, int spôsobKreslenia)Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia.voidobrazok(String súbor, int spôsobKreslenia, double mierka) Alias pre obrázok.voidobrázok(String súbor, int spôsobKreslenia, double mierka)Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia.voidobrazok(String súbor, int spôsobKreslenia, double Δx, double Δy) Alias pre obrázok.voidobrázok(String súbor, int spôsobKreslenia, double Δx, double Δy)Nakreslí obrázok v mierke robota na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(String súbor, int spôsobKreslenia, double Δx, double Δy, double mierka) Alias pre obrázok.voidobrázok(String súbor, int spôsobKreslenia, double Δx, double Δy, double mierka)Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidobrazok(String súbor, int spôsobKreslenia, double Δx, double Δy, double mierkaX, double mierkaY) Alias pre obrázok.voidobrázok(String súbor, int spôsobKreslenia, double Δx, double Δy, double mierkaX, double mierkaY)Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.voidodskoc() Alias pre odskoč.voidodskoc(double dĺžka) Alias pre odskoč.voidodskoč()Prikáže robotu, aby skokom cúvol z aktuálneho miesta o hodnotu svojej veľkosti (v aktuálnom smere).voidodskoč(double dĺžka)Prikáže robotu, aby skokom cúvol z aktuálneho miesta o zadanú dĺžku (v aktuálnom smere).voidohranic() Alias pre ohranič.voidohranic(double horizontálneHranice, double vertikálneHranice) Alias pre ohranič.voidohranic(double ľaváHranica, double dolnáHranica, double praváHranica, double hornáHranica) Alias pre ohranič.voidohranic(double ľaváHranica, double dolnáHranica, double praváHranica, double hornáHranica, int spôsob) Alias pre ohranič.voidohranic(double horizontálneHranice, double vertikálneHranice, int spôsob) Alias pre ohranič.voidohranic(int spôsob) Alias pre ohranič.voidohranič()Nastaví nové ohraničenie polohy robota počas jeho pohybu s predvoleným spôsobom ohraničeniaPRETOČa podľa rozmerov kresliacej plochy, na ktorú má robot nasmerované kreslenie.voidohranič(double horizontálneHranice, double vertikálneHranice)Nastaví nové ohraničenie polohy robota počas jeho pohybu s predvoleným spôsobom ohraničeniaPRETOČvoidohranič(double ľaváHranica, double dolnáHranica, double praváHranica, double hornáHranica)Nastaví nové ohraničenie polohy robota počas jeho pohybu s predvoleným spôsobom ohraničeniaPRETOČvoidohranič(double ľaváHranica, double dolnáHranica, double praváHranica, double hornáHranica, int spôsob)Zapne alebo vypne kontrolu polohy robota počas jeho pohybu prostredníctvom určenia vzdialenosti štyroch hraníc od aktuálnej polohy robota a spôsobu ohraničenia.voidohranič(double horizontálneHranice, double vertikálneHranice, int spôsob)Zapne alebo vypne kontrolu polohy robota počas jeho pohybu prostredníctvom určenia vzdialenosti dvojice horizontálnych a vertikálnych hraníc od aktuálnej polohy robota a spôsobu ohraničenia.voidohranič(int spôsob)Nastaví nové ohraničenie polohy robota počas jeho pohybu so zadaným spôsobom ohraničenia a podľa rozmerov kresliacej plochy, na ktorú má robot nasmerované kreslenie.voidotacajTvar(double otáčanie) Alias pre otáčajTvar.voidotacajTvar(double otáčanie, boolean aktivuj) Alias pre otáčajTvar.doubleotacanieTvaru() Alias pre otáčanieTvaru.voidotáčajTvar(double otáčanie) Nastaví novú hodnotu rovnomerného
otáčania tvaru robota a aktivuje robot ak je to potrebné.voidotáčajTvar(double otáčanie, boolean aktivuj) Nastaví novú hodnotu rovnomerného
otáčania tvaru robota.doubleotáčanieTvaru()Zistí aktuálnu hodnotu rovnomerného otáčania tvaru robota.voidotoc(double uhol) Alias pre otoč.voidotoc(double Δx, double Δy) Alias pre otoč.voidotoc(double Δx, double Δy, double najviacO) Alias pre otoč.voidotoc(Smer objekt) Alias pre otoč.voidotoc(Smer objekt, double najviacO) Alias pre otoč.voidotocNa(double x, double y) Alias pre otočNa.voidotocNa(double x, double y, double najviacO) Alias pre otočNa.voidotocNa(Poloha objekt) Alias pre otočNa.voidotocNa(Poloha objekt, double najviacO) Alias pre otočNa.voidotocNa(Shape tvar) Alias pre otočNa.voidotocNa(Shape tvar, double najviacO) Alias pre otočNa.voidotocNaCiel() Alias pre otočNaCieľ.voidotocNaCiel(double najviacO) Alias pre otočNaCieľ.voidotocNaMys() Alias pre otočNaMyš.voidotocNaMys(double najviacO) Alias pre otočNaMyš.voidotocO(double uhol) Alias pre otočO.voidotocO(double uhol, double najviacO) Alias pre otočO.voidotoč(double uhol)Nasmeruje (otočí) robot rovnakým smerom, ako určuje zadaný uhol.voidotoč(double Δx, double Δy)Nasmeruje robot smerom zadaným pomocou súradníc [Δx, Δy].voidotoč(double Δx, double Δy, double najviacO)Funguje podobne ako metódaotoč, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí robot okamžite smerom na zadané súradnice, iba ním pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.voidotoč(Smer objekt)Nasmeruje tento robot rovnakým smerom, akým je otočený zadaný objekt.voidotoč(Smer objekt, double najviacO)Funguje podobne ako metódaotoč, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí robot okamžite podľa smeru iného robota, iba ním pootočí o maximálnu zadanú hodnotu uhla.voidotočNa(double x, double y)Nasmeruje robot smerom na zadané súradnice [x, y] na podlahe (strope).voidotočNa(double x, double y, double najviacO)Funguje podobne ako metódaotočNa, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí robot okamžite smerom na zadané súradnice, iba ním pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.voidotočNa(Poloha objekt)Nasmeruje tento robot smerom k zadanému objektu.voidotočNa(Poloha objekt, double najviacO)Funguje podobne ako metódaotočNa, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí tento robot okamžite smerom k objektu, iba ho pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.voidotočNa(Shape tvar)Nasmeruje tento robot smerom do stredu hraníc[1] zadaného tvaru.voidotočNa(Shape tvar, double najviacO)Funguje podobne ako metódaotočNa, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí tento robot okamžite smerom do stredu hraníc[1] tvaru, iba ho pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.voidotočNaCieľ()Nasmeruje robot smerom na aktuálne súradnice cieľa.voidotočNaCieľ(double najviacO)Funguje podobne ako metódaotočNaCieľ, ibaže obmedzuje uhol pootočenia – neotočí robot okamžite smerom k súradniciam cieľa, iba ho pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.voidotočNaMyš()Nasmeruje robot smerom na aktuálne súradnice myši.voidotočNaMyš(double najviacO)Funguje podobne ako metódaotočNaMyš, ibaže obmedzuje uhol pootočenia – neotočí tento robot okamžite smerom k súradniciam myši, iba ho pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.voidotočO(double uhol)Otočí robot o zadaný uhol (proti smeru hodinových ručičiek).voidotočO(double uhol, double najviacO)Otočí robot o zadaný uhol s kontrolou maximálneho dovoleného uhla pootočenia.voidotvorenie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidoznacKlucovuFazuDrahy(int fáza) Alias pre označKľúčovúFázuDráhy.voidoznacKlucovuFazuDrahy(Poloha poloha) Alias pre označKľúčovúFázuDráhy.voidoznacKlucovuFazuDrahy(Poloha poloha, double okruh) Alias pre označKľúčovúFázuDráhy.voidoznačKľúčovúFázuDráhy(int fáza)Označí zadanú fázu dráhy za kľúčovú.voidoznačKľúčovúFázuDráhy(Poloha poloha)Označí takú fázu dráhy za kľúčovú, ktorej poloha je najbližšie k zadanej polohe.voidoznačKľúčovúFázuDráhy(Poloha poloha, double okruh)Označí takú fázu dráhy za kľúčovú, ktorej poloha je najbližšie k zadanej polohe a v rámci zadaného okruhu.double[]parametreVzoruCiaryDoma() Alias pre parametreVzoruČiaryDoma.voidparametreVzoruCiaryDoma(double posunVzoru, double... charakterVzoru) Alias pre parametreVzoruČiaryDoma.double[]parametreVzoruČiaryDoma()Zistí, aké parametre majú byť nastavené vzoru čiary pera pri prechode robota domov.voidparametreVzoruČiaryDoma(double posunVzoru, double... charakterVzoru)Nastaví parametre vzoru čiary pera použité pri prechode robota domov.double[]parametreVzoruPeraDoma()Zistí, aké parametre majú byť nastavené vzoru čiary pera pri prechode robota domov.voidparametreVzoruPeraDoma(double posunVzoru, double... charakterVzoru)Nastaví parametre vzoru čiary pera použité pri prechode robota domov.voidpasivita()Táto metóda je predvolene prázdna.booleanpasivny() Alias pre neaktívny.booleanpasívny() Alias pre neaktívny.voidpeciatka() Alias pre pečiatka.voidpečiatka()Vytlačí na aktuálnom plátne robota pečiatku v jeho aktuálnom tvare.booleanperoPolozene() Alias pre peroPoložené.BooleanperoPolozeneDoma() Alias pre peroPoloženéDoma.booleanperoPoložené()Zistí aktuálnu polohu pera.BooleanperoPoloženéDoma()Overí, či robot pri prechode na domovskú pozíciu položí pero na plátno.booleanperoZdvihnute() Alias pre peroZdvihnuté.booleanperoZdvihnuté()Zistí aktuálnu polohu pera.BooleanperoZdvihnuteDoma() Alias pre peroZdvihnutéDoma.BooleanperoZdvihnutéDoma()Overí, či robot pri prechode na domovskú pozíciu zdvihne pero z plátna.Pismopismo() Alias pre písmo.Písmopísmo() Vráti aktuálny typ písma, ktorým
robot píše.voidpismo(Font novéPísmo) Alias pre písmo.voidpísmo(Font novéPísmo) Nastaví nový typ písma, ktorým bude
robot písať.Pismopismo(String názov, double veľkosť) Alias pre písmo.Písmopísmo(String názov, double veľkosť)Nastaví nový typ písma, ktorým bude robot písať.PismopismoDoma() Alias pre písmoDoma.PísmopísmoDoma()Zistí, ako sa mení písmo robota po jeho prechode na domovskú pozíciu.voidpismoDoma(Font novéPísmo) Alias pre písmoDoma.voidpísmoDoma(Font novéPísmo)Nastaví alebo zruší zmenu písma robota po jeho prechode na domovskú pozíciu.PismopismoDoma(String názov, double veľkosť) Alias pre písmoDoma.PísmopísmoDoma(String názov, double veľkosť)Určí nové písmo robota, ktoré bude nastavené po jeho prechode na domovskú pozíciu.voidpod(GRobot ktorého) Alias pre za.voidpohybMysi() Alias pre pohybMyši.voidpohybMyši()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidpokracujVDrahe() Alias pre pokračujVDráhe.voidpokračujVDráhe()Obnoví pohyb robota po aktuálnej dráhe.Bodpoloha() Vráti aktuálne súradnice robota
v objekte typu Bod.voidpoloha(double novéX, double novéY)Nastaví nové súradnice robota.voidpoloha(Poloha poloha) Nastaví nové súradnice robota.booleanpolohaPera()Zistí aktuálnu polohu pera.voidpolohaPera(boolean polož)Zdvihne alebo položí pero na základe zadanej pravdivostnej hodnoty –truepoloží pero,falsezdvihne pero.BooleanpolohaPeraDoma()Zistí, či sa mení stav pera pri prechode na domovskú pozíciu robota.voidpolohaPeraDoma(Boolean položené)Nastaví správanie zmeny polohy pera po prechode domov na základe zadaného objektu typuBoolean.doublepolohaX() Zistí aktuálnu x-ovú súradnicu robota.voidpolohaX(double novéX) Prikáže robotu, aby preskočil na
konkrétnu súradnicu na podlahe (strope) v smere osi x.doublepolohaY() Zistí aktuálnu y-ovú súradnicu robota.voidpolohaY(double novéY) Prikáže robotu, aby preskočil na
konkrétnu súradnicu na podlahe (strope) v smere osi y.voidpolozPero() Alias pre položPero.voidpolozPeroDoma() Alias pre položPeroDoma.voidpoložPero()Položí pero tohto robota na plátno podlahy alebo stropu.voidpoložPeroDoma()Spôsobí, že odteraz vždy pri použití niektorej modifikácie metódydomovpoloží robot pero na plátno.doublepomer() Zistí aktuálnu hodnotu pomeru
rozmerov (šírky a výšky) robota.voidpomer(double pomer) Upraví aktuálny pomer rozmeru
robota, čo má priamy vplyv na generovanie niektorých tvarov
robotomDoublepomerDoma()Zistí, ako sa mení pomer veľkosti robota po jeho prechode na domovskú pozíciu.voidpomerDoma(Double novýPomer)Nastaví alebo zruší ovplyvňovanie pomeru veľkosti robota po jeho prechode na domovskú pozíciu.voidpomerPodlaMierky() Alias pre pomerPodľaMierky.voidpomerPodľaMierky()Nastaví pomer veľkosti robota podľa aktuálnej mierky pomeru tak, aby sa hodnota mierky pomeru vyrovnala na1.0.voidpomerPodlaMierky(double zmena) Alias pre pomerPodľaMierky.voidpomerPodľaMierky(double zmena)Nastaví pomer veľkosti robota podľa aktuálnej mierky pomeru tak, aby nová hodnota mierky pomeru nadobudla zadanú hodnotu.doublepootocenieTvaru() Alias pre pootočenieTvaru.voidpootocenieTvaru(double pootočenie) Alias pre pootočenieTvaru.DoublepootocenieTvaruDoma() Alias pre pootočenieTvaruDoma.voidpootocenieTvaruDoma(Double pootočenie) Alias pre pootočenieTvaruDoma.voidpootocMapuSmerov(double uhol) Alias pre pootočMapuSmerov.doublepootočenieTvaru() Vráti aktuálnu hodnotu pootočenia
tvaru robota.voidpootočenieTvaru(double pootočenie) Nastaví pootočenie tvaru robota podľa
zadanej hodnoty.DoublepootočenieTvaruDoma()Zistí, či sa mení pootočenie tvaru pri prechode na domovskú pozíciu robota.voidpootočenieTvaruDoma(Double pootočenie)Nastaví správanie zmeny pootočenia tvaru robota po prechode na domovskú pozíciu na základe zadaného objektu typuDouble.voidpootočMapuSmerov(double uhol)Pootočí hodnoty v mape smerov o zadaný uhol.BodposlednaPoloha() Alias pre poslednáPoloha.BodposlednáPoloha()Vráti posledné súradnice robota v objekte typuBod.doubleposlednaPolohaX() Alias pre poslednáPolohaX.doubleposlednáPolohaX()Zistí poslednú x-ovú súradnicu robota.doubleposlednaPolohaY() Alias pre poslednáPolohaY.doubleposlednáPolohaY()Zistí poslednú y-ovú súradnicu robota.doubleposlednaSuradnicaX() Alias pre poslednáSúradnicaX.doubleposlednáSúradnicaX() Alias pre poslednáPolohaX.doubleposlednaSuradnicaY() Alias pre poslednáSúradnicaY.doubleposlednáSúradnicaY() Alias pre poslednáPolohaY.doubleposlednySmer() Alias pre poslednýSmer.doubleposlednýSmer()Zistí posledný uhol (smer) robota.doubleposlednyUhol() Alias pre poslednýUhol.doubleposlednýUhol()Zistí posledný uhol (smer) robota.Rectangle2Dposobisko() Alias pre pôsobisko.voidposobisko(Poloha bod) Alias pre pôsobisko.voidposobisko(Shape tvar) Alias pre pôsobisko.voidposun(double Δx, double Δy) Alias pre posuň.voidposuň(double Δx, double Δy)Prikáže robotu, aby sa posunul o zadané súradnice smere osí x a y, pričom obe osi sú pootočené podľa rozdielu aktuálneho smeru robota a uhla 90°.voidposunDolava() Alias pre posuňDoľava.voidposuňDoľava() Alias pre posuňVľavo.voidposunDolava(double dĺžka) Alias pre posuňDoľava.voidposuňDoľava(double dĺžka) Alias pre posuňVľavo.voidposunDoprava() Alias pre posuňDoprava.voidposuňDoprava() Alias pre posuňVpravo.voidposunDoprava(double dĺžka) Alias pre posuňDoprava.voidposuňDoprava(double dĺžka) Alias pre posuňVpravo.voidposunDrahu(double Δx, double Δy) Alias pre posuňDráhu.voidposuňDráhu(double Δx, double Δy)Posunie body dráhy o zadaný rozdiel súradníc Δx a Δy.voidposunDrahu(int početPrvkov) Alias pre posuňDráhu.voidposuňDráhu(int početPrvkov)Posunie prvky v zozname bodov dráhy o zadaný počet doprava (pri zadaní kladného počtu prvkov) alebo doľava (pri zadaní záporného počtu prvkov).voidposunMapuSmerov(int početPrvkov) Alias pre posuňMapuSmerov.voidposuňMapuSmerov(int početPrvkov)Posunie prvky mapy smerov o zadanú hodnotu doprava.voidposunVlavo() Alias pre posuňVľavo.voidposuňVľavo()voidposunVlavo(double dĺžka) Alias pre posuňVľavo.voidposuňVľavo(double dĺžka)Prikáže robotu, aby sa posunul vľavo o zadanú dĺžku (vzhľadom na aktuálnu orientáciu).voidposunVpravo() Alias pre posuňVpravo.voidposuňVpravo()voidposunVpravo(double dĺžka) Alias pre posuňVpravo.voidposuňVpravo(double dĺžka)Prikáže robotu, aby sa posunul vpravo o zadanú dĺžku (vzhľadom na aktuálnu orientáciu).voidposunVSmere(double smer) Alias pre posuňVSmere.voidposuňVSmere(double smer)Prikáže robotu, aby sa posunul v zadanom smere o hodnotu svojej veľkosti.voidposunVSmere(double smer, double dĺžka) Alias pre posuňVSmere.voidposuňVSmere(double smer, double dĺžka)Prikáže robotu, aby sa posunul v zadanom smere o zadanú dĺžku.voidposunVSmere(Smer smer) Alias pre posuňVSmere.voidposuňVSmere(Smer smer)Prikáže robotu, aby sa posunul v zadanom smere o hodnotu svojej veľkosti.voidposunVSmere(Smer smer, double dĺžka) Alias pre posuňVSmere.voidposuňVSmere(Smer smer, double dĺžka)Prikáže robotu, aby sa posunul v zadanom smere o zadanú dĺžku.doubleposunVzoruCiary() Alias pre posunVzoruČiary.voidposunVzoruCiary(double posun) Alias pre posunVzoruČiary.doubleposunVzoruČiary()Vráti aktuálny posun vzoru čiary pera.voidposunVzoruČiary(double posun)Upraví posun vzoru čiary pera.doubleposunVzoruPera()Vráti aktuálny posun vzoru čiary pera.voidposunVzoruPera(double posun)Upraví posun vzoru čiary pera.voidpotvrdenieUdajov() Alias pre potvrdenieÚdajov.voidpotvrdenieÚdajov()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidpotvrdenieVstupu() Alias pre potvrdenieÚdajov.booleanpouzijeKruhovyNater() Alias pre použijeKruhovýNáter.voidpouziKruhovyNater() Alias pre použiKruhovýNáter.booleanpoužijeKruhovýNáter()Overí, či má robot v prípade nastavenia cieľovej farby vytvoriť kruhový náter na výplň tvarov.voidpoužiKruhovýNáter()Prikáže, aby robot v prípade nastavenia cieľovej farby použil na výplň tvarov kruhový náter.Rectangle2Dpôsobisko()Umožňuje získať tvar (čo zahŕňa jeho rozmery a polohu) pôsobiska v objekte typuRectangle2D.voidpôsobisko(Poloha bod)Táto metóda umožňuje rozšíriť pôsobisko tak, aby obsahovalo zadaný bod.voidpôsobisko(Shape tvar)Táto metóda umožňuje rozšíriť pôsobisko (pozri napríklad metóduvymažPôsobisko) o rozmery zadaného tvaru.voidpracuj()Táto metóda je automaticky spúšťanáčasovačom.voidprecitajZoSuboru(Súbor súbor) Alias pre čítajZoSúboru.voidprečítajZoSúboru(Súbor súbor) Alias pre čítajZoSúboru.voidpred(GRobot ktorého)Presunie tento robot pred zadaný robot (z pohľadu zoradenia robotov vo vnútornom zozname, pričom umiestnenie robotov do vrstiev zostane neovplyvnené).voidpredvolenaFarba() Alias pre predvolenáFarba.voidpredvolenáFarba()Nastaví farbu robota na predvolenú farbu.voidpredvolenaHrubkaCiary() Alias pre predvolenáHrúbkaČiary.voidpredvolenáHrúbkaČiary()Nastaví hrúbku čiary pera na predvolenú.voidpredvolenaHrubkaPera() Alias pre predvolenáHrúbkaPera.voidpredvolenáHrúbkaPera()Nastaví hrúbku čiary pera na predvolenú.voidpredvolenePismo() Alias pre predvolenéPísmo.voidpredvolenéPísmo()Vráti nastavenie typu písma robota na predvolené.voidpredvolenyDutyTvar() Alias pre predvolenýDutýTvar.voidpredvolenýDutýTvar()Nastaví predvolený dutý tvar robota.voidpredvolenyTvar() Alias pre predvolenýTvar.voidpredvolenýTvar()Nastaví predvolený tvar robota.voidpredvolenyTvar(boolean vyplnený) Alias pre predvolenýTvar.voidpredvolenýTvar(boolean vyplnený)Nastaví predvolený tvar robota.voidpredvolenyVyplnenyTvar() Alias pre predvolenýVyplnenýTvar.voidpredvolenýVyplnenýTvar()Nastaví predvolený vyplnený tvar robota.voidpredvolenyVzorCiary() Alias pre predvolenýVzorČiary.voidpredvolenýVzorČiary()Nastaví vzor čiary pera na predvolený, čo je plná neprerušovaná čiara.voidpredvolenyVzorPera() Alias pre predvolenýVzorPera.voidpredvolenýVzorPera()Nastaví vzor čiary pera na predvolený, čo je plná neprerušovaná čiara.voidprekreslenie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidprepisBod() Alias pre prepíšBod.voidprepíšBod()Prepíše farebné zložky a zložku priehľadnosti bodu na aktuálnej pozícii robota aktuálnou farbou robota.voidprepusti() Alias pre uvoľni.voidprepusti(Oblasť oblasť) Alias pre uvoľni.voidpreskoc(double Δx, double Δy) Alias pre preskoč.voidpreskocDolava() Alias pre preskočDoľava.voidpreskocDolava(double dĺžka) Alias pre preskočDoľava.voidpreskocDoprava() Alias pre preskočDoprava.voidpreskocDoprava(double dĺžka) Alias pre preskočDoprava.voidpreskocVlavo() Alias pre preskočVľavo.voidpreskocVlavo(double dĺžka) Alias pre preskočVľavo.voidpreskocVpravo() Alias pre preskočVpravo.voidpreskocVpravo(double dĺžka) Alias pre preskočVpravo.voidpreskocVSmere(double smer) Alias pre preskočVSmere.voidpreskocVSmere(double smer, double dĺžka) Alias pre preskočVSmere.voidpreskocVSmere(Smer smer) Alias pre preskočVSmere.voidpreskocVSmere(Smer smer, double dĺžka) Alias pre preskočVSmere.voidpreskoč(double Δx, double Δy)Prikáže robotu, aby preskočil o zadané súradnice smere osí x a y, pričom obe osi sú pootočené podľa rozdielu aktuálneho smeru robota a uhla 90°.voidpreskočDoľava() Alias pre preskočVľavo.voidpreskočDoľava(double dĺžka) Alias pre preskočVľavo.voidpreskočDoprava() Alias pre preskočVpravo.voidpreskočDoprava(double dĺžka) Alias pre preskočVpravo.voidpreskočVľavo()voidpreskočVľavo(double dĺžka)Prikáže robotu, aby preskočil vľavo o zadanú dĺžku (vzhľadom na aktuálnu orientáciu).voidpreskočVpravo()voidpreskočVpravo(double dĺžka)Prikáže robotu, aby preskočil vpravo o zadanú dĺžku (vzhľadom na aktuálnu orientáciu).voidpreskočVSmere(double smer)Prikáže robotu, aby preskočil v zadanom smere o hodnotu svojej veľkosti.voidpreskočVSmere(double smer, double dĺžka)Prikáže robotu, aby preskočil v zadanom smere o zadanú dĺžku.voidpreskočVSmere(Smer smer)Prikáže robotu, aby preskočil v zadanom smere o hodnotu svojej veľkosti.voidpreskočVSmere(Smer smer, double dĺžka)Prikáže robotu, aby preskočil v zadanom smere o zadanú dĺžku.voidpresunutieOkna()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.doublepriehladnost() Alias pre priehľadnosť.doublepriehľadnosť() Zistí aktuálnu úroveň
(ne)priehľadnosti tvaru tohto robota.voidpriehladnost(double priehľadnosť) Alias pre priehľadnosť.voidpriehľadnosť(double priehľadnosť) Nastaví novú úroveň
(ne)priehľadnosti tohto robota použitú pri kreslení
(zobrazení) jeho tvaru.voidpriehladnost(Priehľadnosť objekt) Alias pre priehľadnosť.voidpriehľadnosť(Priehľadnosť objekt)Skopíruje úroveň (ne)priehľadnosti zo zadaného objektu.DoublepriehladnostDoma() Alias pre priehľadnosťDoma.DoublepriehľadnosťDoma()Zistí, ako sa mení priehľadnosť robota po jeho prechode na domovskú pozíciu.voidpriehladnostDoma(Double nováPriehľadnosť) Alias pre priehľadnosťDoma.voidpriehľadnosťDoma(Double nováPriehľadnosť)Nastaví alebo zruší ovplyvňovanie priehľadnosti robota po jeho prechode na domovskú pozíciu.voidprijatieVyzvy(GRobot autor, int kľúč) Alias pre prijatieVýzvy.voidprijatieVýzvy(GRobot autor, int kľúč)Táto metóda je predvolene prázdna.voidpustenieSuboru(String súbor) Alias pre pustenieSúboru.voidpustenieSúboru(String súbor)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidregistrujVKonfiguracii() Alias pre registrujVKonfigurácii.voidregistrujVKonfigurácii()Zaregistruje tento robot v konfigurácii sveta.voidregistrujVKonfiguracii(String novéMeno) Alias pre registrujVKonfigurácii.voidregistrujVKonfigurácii(String novéMeno)Zaregistruje tento robot v konfigurácii sveta pod novým menom.voidrolovanieKolieskomMysi() Alias pre rolovanieKolieskomMyši.voidrolovanieKolieskomMyši()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidrozbehniSa()Metóda slúži na aktiváciu robota, ktorý má nenulové zrýchlenievoidrozbehniSa(double zrýchlenie)Metóda nastaví robotu zadané zrýchlenie a v prípade zadania nenulovej hodnoty automaticky aktivuje robot.voidrozbehniSa(double zrýchlenie, boolean aktivuj)Metóda nastaví robotu zadané zrýchlenie a zároveň dovoľuje programátorovi určiť, či má byť robot v prípade zadania nenulovej hodnoty zrýchlenia automaticky aktivovaný.voidrozbehniSa(double zrýchlenie, double maximálnaRýchlosť)Metóda nastaví robotu nové hodnoty zrýchlenia a maximálnej rýchlosti a v prípade zadania nenulovej hodnoty zrýchlenia automaticky aktivuje robot.voidrozbehniSa(double zrýchlenie, double maximálnaRýchlosť, boolean aktivuj)Metóda nastaví robotu nové hodnoty zrýchlenia a maximálnej rýchlosti a dovoľuje programátorovi určiť, či má byť robot v prípade zadania nenulovej hodnoty zrýchlenia automaticky aktivovaný.Rozmerrozmer()voidrozmer(Rozmer rozmer)Nastaví nové rozmery robota podľa zadanej implementácie rozmeru.RozmerrozmerDoma()voidrozmerDoma(Rozmer novýRozmer)Nastaví alebo zruší nastavovanie zmeny rozmerov (šírky a výšky) robota po prechode na domovskú pozíciu.Rozmeryrozmery()Zistí aktuálne rozmery robota.voidrozmery(double šírka, double výška)Nastaví nové rozmery robota.voidrozmery(Rozmer rozmer)Nastaví nové rozmery robota podľa zadanej implementácie rozmeru.doublerychlost() Alias pre rýchlosť.doublerýchlosť() Zistí aktuálnu hodnotu
rýchlosti tohto robota.voidrychlost(double rýchlosť) Alias pre rýchlosť.voidrýchlosť(double rýchlosť)voidrychlost(double rýchlosť, boolean aktivuj) Alias pre rýchlosť.voidrýchlosť(double rýchlosť, boolean aktivuj)Nastaví robotu novú hodnotu rýchlosti a dovolí programátorovi rozhodnúť, či má byť robot automaticky aktivovaný.doublerychlostOtacania() Alias pre uhlováRýchlosť.voidrychlostOtacania(double uhlováRýchlosť) Alias pre uhlováRýchlosť.voidrychlostOtacania(double uhlováRýchlosť, boolean aktivuj) Alias pre uhlováRýchlosť.doublerýchlosťOtáčania() Alias pre uhlováRýchlosť.voidrýchlosťOtáčania(double uhlováRýchlosť) Alias pre uhlováRýchlosť.voidrýchlosťOtáčania(double uhlováRýchlosť, boolean aktivuj) Alias pre uhlováRýchlosť.doublerychlostPosunu() Alias pre rýchlosťPosunu.doublerýchlosťPosunu() Zistí aktuálnu hodnotu
rýchlosti posunu
tohto robota, čím je chápaná rýchlosť v smere kolmom
na aktuálny smer robota.voidrychlostPosunu(double rýchlosťPosunu) Alias pre rýchlosťPosunu.voidrýchlosťPosunu(double rýchlosťPosunu)voidrychlostPosunu(double rýchlosťPosunu, boolean aktivuj) Alias pre rýchlosťPosunu.voidrýchlosťPosunu(double rýchlosťPosunu, boolean aktivuj)Nastaví robotu novú hodnotu rýchlosti posunu a dovolí programátorovi rozhodnúť, či má byť robot automaticky aktivovaný.StringS(Object... argumenty)Táto metóda slúži na rýchly prevod rôznych objektov do textovej podoby a ich zlúčenie do jedného reťazca.voidsekvencia(int kódSpracovania, Object zdroj, Object cieľ, long stav, long celkovo)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robotadoublesirka() Alias pre šírka.voidsirka(double šírka) Alias pre šírka.intsirkaMedzery() Alias pre šírkaMedzery.intsirkaRetazca(String reťazec) Alias pre šírkaReťazca.voidskoc() Alias pre skoč.voidskoc(double dĺžka) Alias pre skoč.voidskoc(double Δx, double Δy) Alias pre skoč.voidskoc(Poloha poloha) Alias pre skoč.voidskocNa(double novéX, double novéY) Alias pre skočNa.voidskocNa(Poloha objekt) Alias pre skočNa.voidskocNa(Shape tvar) Alias pre skočNa.voidskocNaCiel() Alias pre skočNaCieľ.voidskocNaMys() Alias pre skočNaMyš.voidskocNaPoObluku(double x, double y) Alias pre skočNaPoOblúku.voidskocNaPoObluku(Poloha poloha) Alias pre skočNaPoOblúku.voidskocNaPootoceny(double x, double y, double uhol) Alias pre skočNaPootočený.voidskocNaPootoceny(double x, double y, Smer smer) Alias pre skočNaPootočený.voidskocNaPootoceny(Poloha poloha, double uhol) Alias pre skočNaPootočený.voidskocNaPootoceny(Poloha poloha, Smer smer) Alias pre skočNaPootočený.voidskocPoObluku() Alias pre skočPoOblúku.voidskocPoObluku(boolean vpravo) Alias pre skočPoOblúku.voidskocPoObluku(double uhol) Alias pre skočPoOblúku.voidskocPoObluku(double uhol, boolean vpravo) Alias pre skočPoOblúku.voidskocPoObluku(double uhol, double polomer) Alias pre skočPoOblúku.voidskocPootoceny(double Δx, double Δy, double uhol) Alias pre skočPootočený.voidskocPootoceny(double Δx, double Δy, Smer smer) Alias pre skočPootočený.voidskoč()Prikáže robotu, aby preskočil v aktuálnom smere dopredu o hodnotu svojej veľkosti.voidskoč(double dĺžka)Prikáže robotu, aby preskočil dopredu o zadanú dĺžku v aktuálnom smere.voidskoč(double Δx, double Δy)Prikáže robotu, aby sa na podlahe (strope) preskočil o zadané súradnice v horizontálnom a vertikálnom smere.voidskoč(Poloha poloha)Prikáže robotu, aby sa na podlahe (strope) preskočil o súradnice, ktoré obsahuje zadaná inštancia polohy.voidskočNa(double novéX, double novéY)Prikáže robotu, aby preskočil na konkrétne súradnice na podlahe (strope).voidskočNa(Poloha objekt)Prikáže tomuto robotu, aby preskočil na polohu zadaného objektu.voidskočNa(Shape tvar)Prikáže robotu, aby preskočil do stredu hraníc[1] zadaného tvaru.voidskočNaCieľ()Prikáže robotu, aby v rámci podlahy (stropu) preskočil na aktuálne súradnice cieľa.voidskočNaMyš()Prikáže robotu, aby v rámci podlahy (stropu) preskočil na aktuálne súradnice myši.voidskočNaPoOblúku(double x, double y)Pohne robotom po oblúku do cieľového bodu určeného súradnicami [x, y] s ohľadom na aktuálne otočenie robota bez nakreslenia oblúka.voidskočNaPoOblúku(Poloha poloha)Funguje rovnako akoskočNaPoOblúku(x, y), ale namiesto samostatných súradníc prijíma implementáciu rozhraniaPoloha(napríkladBod).voidskočNaPootočený(double x, double y, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota.voidskočNaPootočený(double x, double y, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota.voidskočNaPootočený(Poloha poloha, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota.voidskočNaPootočený(Poloha poloha, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota.voidskočPoOblúku()Pohne robotom po oblúku s polomerom rovným veľkosti robota o aktuálny uhol otáčania bez nakreslenia oblúka.voidskočPoOblúku(boolean vpravo)Pohne robotom po oblúku s polomerom rovným veľkosti robota o aktuálny uhol otáčania bez nakreslenia oblúka.voidskočPoOblúku(double uhol)Pohne robotom po oblúku s polomerom rovným veľkosti robota o zadaný uhol bez jeho nakreslenia.voidskočPoOblúku(double uhol, boolean vpravo)Pohne robotom po oblúku s polomerom rovným veľkosti robota o zadaný uhol bez jeho nakreslenia.voidskočPoOblúku(double uhol, double polomer)Pohne robotom po oblúku so zadaným polomerom o zadaný uhol bez jeho nakreslenia.voidskočPootočený(double Δx, double Δy, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných relatívnych súradníc o zadaný uhol.voidskočPootočený(double Δx, double Δy, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných relatívnych súradníc o zadaný uhol.voidskonciCestu() Alias pre skončiCestu.voidskonciKreslenie() Alias pre skončiKreslenie.voidskonciKreslenie(Graphics2D g2d) Alias pre skončiKreslenie.voidskončiCestu()Ukončí záznam cesty (ak prebieha) a ponechá ho v pamäti na ďalšie použitie.voidskončiKreslenie()Táto metóda je určená na implementáciu vlastného kreslenia robotom s použitím interného (aktívneho) grafického objektu robota dostupného aj prostredníctvom metódygrafika.voidskončiKreslenie(Graphics2D g2d)Táto metóda je určená na implementáciu vlastného kreslenia robotom s použitím externého grafického objektuGraphics2D.voidskry()Skryje tento robot.voidskryDoma()Spôsobí, že odteraz sa robot vždy pri použití niektorej modifikácie metódydomovskryje.voidskrytie()Táto metóda je predvolene prázdna.voidskrytieOkna()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.booleanskryty() Alias pre skrytý.booleanskrytý()Zistí, či je robot viditeľný alebo skrytý.BooleanskrytyDoma() Alias pre skrytýDoma.BooleanskrytýDoma()Zistí, či sa mení viditeľnosť robota pri prechode na domovskú pozíciu.doublesmer() Zistí aktuálny uhol (smer) robota.voidsmer(double uhol) Nasmeruje robot podľa zadaného uhla.doublesmer(double Δx, double Δy)Zistí smer k bodu zadanému pomocou odchýlok súradníc v horizontálnom a vertikáklom smere [Δx, Δy].voidsmer(Smer objekt) Nasmeruje robot podľa zadaného
objektu.doublesmerDoma() Zistí aktuálny smer (uhol)
domovskej pozície robota.voidsmerDoma(double uhol) Nastaví aktuálny smer (uhol)
domovskej pozície robota.doublesmerNa(double x, double y)Zistí smer (uhol) z aktuálneho miesta robota smerom na zadané súradnice [x, y].doublesmerNa(Poloha objekt)Zistí smer (uhol) z aktuálneho miesta robota smerom ku zadanému objektu.doublesmerNa(Shape tvar)Zistí smer (uhol) z aktuálneho miesta robota smerom do, stredu hraníc[1] zadaného tvaru.doublesmerNaCiel() Alias pre smerNaCieľ.doublesmerNaCieľ()Zistí smer (uhol) z aktuálneho miesta robota smerom k aktuálnym súradniciam cieľa.doublesmerNaMys() Alias pre smerNaMyš.doublesmerNaMyš()Zistí smer (uhol) z aktuálneho miesta robota smerom k aktuálnym súradniciam myši.booleansmerujeDoCiela() Alias pre cieľAktívny.booleansmerujeDoCieľa() Alias pre cieľAktívny.booleansomNad(GRobot ktorým) Alias pre somPred.booleansomPod(GRobot ktorým) Alias pre somZa.booleansomPred(GRobot ktorým)Overí, či je tento robot pred zadaným robotom.booleansomZa(GRobot ktorým)Overí, či je tento robot za zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Color farba)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Color farba, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, double hrúbka)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, double hrúbka, Color farba)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, double hrúbka, Color farba, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, double hrúbka, Farebnosť objekt)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, double hrúbka, Farebnosť objekt, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, double hrúbka, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Farebnosť objekt)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Farebnosť objekt, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Stroke čiara)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Stroke čiara, Color farba)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Stroke čiara, Color farba, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Stroke čiara, Farebnosť objekt)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Stroke čiara, Farebnosť objekt, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnicaspojnica(GRobot cieľ, Stroke čiara, Shape orezanieZačiatku, Shape orezanieKonca)Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom.GRobot.Spojnica[]spojniceDo()Vytvorí zoznam všetkých spojníc smerujúcich do tohto robota.GRobot.Spojnica[]spojniceZ()Vytvorí zoznam všetkých spojníc smerujúcich z tohto robota.intsposobKreslenia() Alias pre spôsobKreslenia.voidsposobKreslenia(int novýSpôsobKreslenia) Alias pre spôsobKreslenia.intsposobOhranicenia() Alias pre spôsobOhraničenia.intspôsobKreslenia() Číta spôsob kreslenia obrázkov
a písania textov (resp.voidspôsobKreslenia(int novýSpôsobKreslenia) Zmení spôsob kreslenia obrázkov
a písania textov (resp.intspôsobOhraničenia()voidspracovaniePrikazu() Alias pre spracovaniePríkazu.voidspracovaniePríkazu()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidspracujRiadokVstupu(String riadokVstupu)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidspustenie()Táto metóda je predvolene prázdna.voidspusti()Aktivuje robot alternatívnym spôsobom a spustí časovač (ak je nečinný).voidspusti(boolean ajČasovač)Metóda má rovnaký účel ako metódaspusti()s tým, že dovoľuje programátorovi určiť, či má byť automaticky spustený časovač (ak už nie je v činnosti).voidspusti(int trvanieAktivity)Metóda má rovnaký účel ako metódaspusti(), ibaže dovoľuje programátorovi určiť trvanie aktivity.voidspusti(int trvanieAktivity, boolean ajČasovač)Metóda spája funkcionalitu metódspusti(trvanieAktivity)aspusti(ajČasovač).voidstatieNaDrahe() Alias pre státieNaDráhe.voidstátieNaDráhe()Táto metóda je predvolene prázdna.voidstlacenieKlavesu() Alias pre stlačenieKlávesu.voidstlacenieTlacidlaMysi() Alias pre stlačenieTlačidlaMyši.voidstlačenieKlávesu()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidstlačenieTlačidlaMyši()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.Shapestvorca() Alias pre štvorec.Shapestvorca(double polomer) Alias pre štvorec.Shapestvorec() Alias pre štvorec.Shapestvorec(double polomer) Alias pre štvorec.doublesuradnicaX() Alias pre súradnicaX.doublesúradnicaX() Alias pre polohaX.voidsuradnicaX(double novéX) Alias pre súradnicaX.voidsúradnicaX(double novéX) Alias pre polohaX.doublesuradnicaY() Alias pre súradnicaY.doublesúradnicaY() Alias pre polohaY.voidsuradnicaY(double novéY) Alias pre súradnicaY.voidsúradnicaY(double novéY) Alias pre polohaY.booleansuSpojniceDo() Alias pre súSpojniceDo.booleansúSpojniceDo()Overí, či jestvuje aspoň jedna spojnica smerujúca do tohto robota.booleansuSpojniceZ() Alias pre súSpojniceZ.booleansúSpojniceZ()Overí, či jestvuje aspoň jedna spojnica smerujúca z tohto robota.doublešírka() Vráti aktuálnu šírku robota.voidšírka(double šírka) Nastaví novú šírku robota.intšírkaMedzery()Zistí šírku medzery v bodoch pri použití aktuálneho typu písma.intšírkaReťazca(String reťazec)Zistí šírku zadaného reťazca v bodoch pri použití aktuálneho typu písma.Shapeštvorca() Alias pre štvorec.Shapeštvorca(double polomer) Alias pre štvorec.Shapeštvorec()Nakreslí alebo vyplní na mieste robota štvorec určený rozmerom vpísanej kružnice s polomerom veľkosti robota a obrátený v smere robota.Shapeštvorec(double polomer)Nakreslí alebo vyplní na mieste robota štvorec určený rozmerom vpísanej kružnice a obrátený v smere robota.voidtahanieMysou() Alias pre ťahanieMyšou.voidťahanieMyšou()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidtahanieSuborov() Alias pre ťahanieSúborov.voidťahanieSúborov()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidtahanieUkoncene(JComponent zdroj, Transferable údaje, int akcia) Alias pre ťahanieUkončené.voidťahanieUkončené(JComponent zdroj, Transferable údaje, int akcia)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.Shapetext(String text)Napíše[1] zadaný text na pozícii robota podľa aktuálneho spôsobu kreslenia (pozri:spôsobKreslenia) alebo vytvorí tvar obrysu zadaného textu (čo záleží na tom, či je tento robot momentálne zamestnaný alebo nie a či je zakázané kreslenie tvarov; pozri vysvetlenie pri návratovej hodnote).Shapetext(String text, double Δx, double Δy)Napíše[1] zadaný text na pozícii robota podľa aktuálneho spôsobu kreslenia (pozri:spôsobKreslenia) a s vysunutím stredu otáčania o zadané odchýlky Δx a Δy alebo vytvorí tvar obrysu zadaného textu (čo záleží na tom, či je tento robot momentálne zamestnaný alebo nie a či je zakázané kreslenie tvarov; pozri vysvetlenie pri návratovej hodnote).Shapetext(String text, int spôsobKreslenia)Napíše[1] zadaný text na pozícii robota podľa zadaného spôsobu kreslenia alebo vytvorí tvar obrysu zadaného textu.Shapetext(String text, int spôsobKreslenia, double Δx, double Δy)Napíše[1] zadaný text na pozícii robota podľa zadaného spôsobu kreslenia a s vysunutím stredu otáčania o zadané odchýlky Δx a Δy alebo vytvorí tvar obrysu zadaného textu.voidtik()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.Shapetrojzubec()Táto metóda buď nakreslí, alebo vráti tvar trojzubca, ktorý je predvoleným tvarom grafického robota.Shapetrojzubec(boolean starý)Táto metóda buď nakreslí, alebo vráti starý alebo nový tvar trojzubca, ktorý tvorí predvolený tvar grafického robota.inttrvanieAktivity()Zisťuje aktuálnu hodnotu trvania aktivity, čo je vlastne čas meraný v tikoch aplikácie.voidtrvanieAktivity(int trvanieAktivity)Umožňuje zmeniť aktuálne trvanie aktivity.inttrvaniePasivity()Zisťuje aktuálnu hodnotu trvania pasivity.voidtrvaniePasivity(int trvaniePasivity)Umožňuje zmeniť trvanie pasivity – naplánovať automatickú aktiváciu po uplynutí zadaného časového intervalu.ShapetvarPodlaCiary(Shape tvar) Alias pre tvarPodľaČiary.ShapetvarPodľaČiary(Shape tvar)Vyrobí zo zadaného tvaru nový tvar podľa aktuálneho typu ťahu.doubleuhlovaRychlost() Alias pre uhlováRýchlosť.doubleuhlováRýchlosť() Zistí aktuálnu hodnotu
uhlovej rýchlosti
(rýchlosti otáčania) tohto robota.voiduhlovaRychlost(double uhlováRýchlosť) Alias pre uhlováRýchlosť.voiduhlováRýchlosť(double uhlováRýchlosť) Nastaví novú hodnotu uhlovej
rýchlosti (rýchlosti otáčania) tohto robota.voiduhlovaRychlost(double uhlováRýchlosť, boolean aktivuj) Alias pre uhlováRýchlosť.voiduhlováRýchlosť(double uhlováRýchlosť, boolean aktivuj)Nastaví novú hodnotu uhlovej rýchlosti (rýchlosti otáčania) tohto robota.doubleuhloveZrychlenie() Alias pre uhlovéZrýchlenie.doubleuhlovéZrýchlenie() Zistí hodnotu uhlového zrýchlenia (zrýchlenia
otáčania) tohto robota.voiduhloveZrychlenie(double uhlovéZrýchlenie) Alias pre uhlovéZrýchlenie.voiduhlovéZrýchlenie(double uhlovéZrýchlenie) Nastaví robotu novú hodnotu
uhlového zrýchlenia (zrýchlenia otáčania).voiduhloveZrychlenie(double uhlovéZrýchlenie, boolean aktivuj) Alias pre uhlovéZrýchlenie.voiduhlovéZrýchlenie(double uhlovéZrýchlenie, boolean aktivuj)Metóda funguje rovnako ako metódauhlovéZrýchlenie(double uhlovéZrýchlenie), ale dovoľuje programátorovi určiť, či smie byť robot (v prípade zadania nenulového zrýchlenia) aktivovaný.doubleuhol() Zistí aktuálny uhol (smer) robota.voiduhol(double uhol) Nasmeruje robot podľa zadaného uhla.doubleuhol(double Δx, double Δy) Alias pre smer.voiduhol(Smer objekt) Nasmeruje robot podľa zadaného
objektu.doubleuholDoma() Zistí aktuálny smer (uhol)
domovskej pozície robota.voiduholDoma(double uhol) Nastaví aktuálny smer (uhol)
domovskej pozície robota.doubleuholNa(double x, double y) Alias pre smerNa.doubleuholNa(Poloha objekt) Alias pre smerNa.doubleuholNa(Shape tvar) Alias pre smerNa.doubleuholNaCiel() Alias pre smerNaCieľ.doubleuholNaCieľ() Alias pre smerNaCieľ.doubleuholNaMys() Alias pre smerNaMyš.doubleuholNaMyš() Alias pre smerNaMyš.doubleuholOtacania() Alias pre uholOtáčania.voiduholOtacania(double uhol) Alias pre uholOtáčania.doubleuholOtáčania()voiduholOtáčania(double uhol)voidukaz() Alias pre ukáž.voidukaz(boolean ukáž) Alias pre ukáž.voidukazDoma() Alias pre viditeľnýDoma.voidukáž()Zobrazí tento robot.voidukáž(boolean ukáž)Zobrazí alebo skryje tento robot podľa hodnoty parametraukáž.voidukážDoma()Spôsobí, že odteraz sa robot vždy pri použití niektorej modifikácie metódydomovzobrazí.voidukoncenie() Alias pre ukončenie.voidukoncenieProcesu(Svet.PríkazovýRiadok príkazovýRiadok, int návratovýKód) Alias pre ukončenieProcesu.voidukoncenieUpravyTextu(String text, int spôsob) Alias pre ukončenieÚpravyTextu.voidukončenie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidukončenieProcesu(Svet.PríkazovýRiadok príkazovýRiadok, int návratovýKód)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidukončenieÚpravyTextu(String text, int spôsob)Táto metóda je predvolene prázdna.voidulozDoSuboru(Súbor súbor) Alias pre uložDoSúboru.voiduložDoSúboru(Súbor súbor)Uloží vlastnosti robota do zadaného súboru.voidupravCiel(double x, double y) Alias pre upravCieľ.voidupravCieľ(double x, double y)Upraví tomuto robotu cieľ smerovania.voidupravCiel(double x, double y, boolean spusti) Alias pre upravCieľ.voidupravCieľ(double x, double y, boolean spusti)Upraví tomuto robotu cieľ smerovania.voidupravCiel(Poloha objekt) Alias pre upravCieľ.voidupravCieľ(Poloha objekt)Upraví tomuto robotu cieľ smerovania.voidupravCiel(Poloha objekt, boolean spusti) Alias pre upravCieľ.voidupravCieľ(Poloha objekt, boolean spusti)Upraví tomuto robotu cieľ smerovania.voidupravCiel(Shape tvar) Alias pre upravCieľ.voidupravCieľ(Shape tvar)Upraví tomuto robotu cieľ smerovania.voidupravCiel(Shape tvar, boolean spusti) Alias pre upravCieľ.voidupravCieľ(Shape tvar, boolean spusti)Upraví tomuto robotu cieľ smerovania.voidupravCielNaMys() Alias pre upravCieľNaMyš.voidupravCielNaMys(boolean spusti) Alias pre upravCieľNaMyš.voidupravCieľNaMyš()Upraví tomuto robotu cieľ smerovania.voidupravCieľNaMyš(boolean spusti)Upraví tomuto robotu cieľ smerovania.voidupravPriehladnost(double zmena) Alias pre upravPriehľadnosť.voidupravPriehľadnosť(double zmena)Upraví úroveň (ne)priehľadnosti tohto robota.booleanupravText(String text)Táto metóda umožní používateľovi upraviť text priamo na plátne.booleanupravText(String text, double šírka)Táto metóda umožní používateľovi upraviť text priamo na plátne.voiduvolnenieKlavesu() Alias pre uvoľnenieKlávesu.voiduvoľnenieKlávesu()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voiduvolnenieTlacidlaMysi() Alias pre uvoľnenieTlačidlaMyši.voiduvoľnenieTlačidlaMyši()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voiduvolni() Alias pre uvoľni.voiduvoľni()Automaticky uvoľní robot z úloh tvorby (prípadne kreslenia) oblasti.voiduvolni(Oblasť oblasť) Alias pre uvoľni.voiduvoľni(Oblasť oblasť)Uvoľní tento robot z úloh tvorby (prípadne kreslenia) zadanej oblasti.voiduzavriCestu()Ukončí záznam cesty (ak prebieha), uzavrie cestu (prepojí posledný bod posledného kresleného segmentu s prvým bodom cesty) a ponechá záznam cesty na ďalšie použitie.Shapevajce(double polomer, String... nastavenia)Nakreslí vajce.doublevelkost() Alias pre veľkosť.doubleveľkosť() Zistí aktuálnu veľkosť robota.voidvelkost(double veľkosť) Alias pre veľkosť.voidveľkosť(double veľkosť) Nastaví novú veľkosť robota.DoublevelkostDoma() Alias pre veľkosťDoma.DoubleveľkosťDoma()Zistí, ako sa mení veľkosť robota po jeho prechode na domovskú pozíciu.voidvelkostDoma(Double nováVeľkosť) Alias pre veľkosťDoma.voidveľkosťDoma(Double nováVeľkosť)Nastaví alebo zruší ovplyvňovanie veľkosti robota po jeho prechode na domovskú pozíciu.voidvelkostPodlaMierky() Alias pre veľkosťPodľaMierky.voidveľkosťPodľaMierky()voidvelkostPodlaMierky(double zmena) Alias pre veľkosťPodľaMierky.voidveľkosťPodľaMierky(double zmena)booleanviditelny() Alias pre viditeľný.booleanviditeľný()Zistí, či je robot viditeľný alebo skrytý.BooleanviditelnyDoma() Alias pre viditeľnýDoma.BooleanviditeľnýDoma()Zistí, či sa mení viditeľnosť robota pri prechode na domovskú pozíciu.voidvlastnyTvar(Image obrázok) Alias pre vlastnýTvar.voidvlastnýTvar(Image obrázok)Zmení tvar robota z klasického tvaru na zadaný obrázok.voidvlastnyTvar(Image obrázok, boolean upravVeľkosťRobota) Alias pre vlastnýTvar.voidvlastnýTvar(Image obrázok, boolean upravVeľkosťRobota)Zmení tvar robota z klasického tvaru na zadaný obrázok.voidvlastnyTvar(KreslenieTvaru tvar) Alias pre vlastnýTvar.voidvlastnýTvar(KreslenieTvaru tvar)Umožní kresliť vlastný tvar robota namiesto klasického tvaru.voidvlastnyTvar(String súbor) Alias pre vlastnýTvar.voidvlastnýTvar(String súbor)Zmení tvar robota z klasického tvaru na zadaný obrázok.voidvlastnyTvar(String súbor, boolean upravVeľkosťRobota) Alias pre vlastnýTvar.voidvlastnýTvar(String súbor, boolean upravVeľkosťRobota)Zmení tvar robota z klasického tvaru na zadaný obrázok.voidvlavo() Alias pre vľavo.voidvľavo()Prikáže robotu, aby sa obrátil o uhol otáčania (predvolene 45° – s ohľadom na definície hodnôt konštát v rozhraníSmer) proti smeru hodinových ručičiek.voidvlavo(double uhol) Alias pre vľavo.voidvľavo(double uhol)Prikáže robotu, aby sa obrátil o zadaný uhol proti smeru hodinových ručičiek.voidvolbaKontextovejPolozky() Alias pre voľbaKontextovejPoložky.voidvoľbaKontextovejPoložky()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidvolbaPolozkyPonuky() Alias pre voľbaPoložkyPonuky.voidvoľbaPoložkyPonuky()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidvolbaSystemovejIkony() Alias pre voľbaSystémovejIkony.voidvoľbaSystémovejIkony()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidvolbaSystemovejPolozky() Alias pre voľbaSystémovejPoložky.voidvoľbaSystémovejPoložky()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidvolbaTlacidla() Alias pre voľbaTlačidla.voidvoľbaTlačidla()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidvpravo()Prikáže robotu, aby sa obrátil o uhol otáčania (predvolene 45° – s ohľadom na definície hodnôt konštát v rozhraníSmer) v smere hodinových ručičiek.voidvpravo(double uhol)Prikáže robotu, aby sa obrátil o zadaný uhol v smere hodinových ručičiek.voidvpred() Alias pre dopredu.voidvpred(double dĺžka) Alias pre dopredu.intvrstva() Vráti poradové číslo vrstvy kreslenia,
v ktorej je umiestnený tento robot.voidvrstva(int vrstva) Preradí tento robot do vrstvy
s určeným poradovým číslom.voidvstupDoKlucovejFazyDrahy(int fáza) Alias pre vstupDoKľúčovejFázyDráhy.voidvstupDoKľúčovejFázyDráhy(int fáza)Táto metóda je predvolene prázdna.booleanvykonajPrikaz(String príkaz) Alias pre vykonajPríkaz.booleanvykonajPríkaz(String príkaz)Táto metóda má rovnaké jadro ako mechanizmus vykonávania príkazov v interaktívnom režime a umožňuje používať príkazy, ktoré sú dostupné v tomto režime aj za jeho hranicami (t. j. bez nevyhnutnosti jeho aktivácie).voidvylejFarbu()Robot vyleje na svojej pozícii na aktívne plátno alebo do obrázka, kam bolo presmerované jeho kreslenie, svoju farbu, ktorá sa odtiaľ rozšíri po okraje okolitej kresby.voidvymazanie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidvymazPosobisko() Alias pre vymažPôsobisko.voidvymažPôsobisko()Vymaže pôsobisko, čo je oblasť obdĺžnika, v rámci ktorého robot kreslil od posledného vymazania pôsobiska alebo od posledného použitia niektorej z metóddomov.voidvypln() Alias pre vyplň.voidvyplň()Vyplní aktívne plátno alebo obrázok, do ktorého má robot presmerované kreslenie, aktuálnou farbou kreslenia alebo náterom robota.voidvyplnajTvary() Alias pre vypĺňajTvary.voidvypĺňajTvary()Upraví spôsob kreslenia tvarov generovaných robotom.voidvyplnajTvary(boolean vypĺňaj) Alias pre vypĺňajTvary.voidvypĺňajTvary(boolean vypĺňaj)Upraví spôsob kreslenia tvarov generovaných robotom.voidvyplnajUtvary() Alias pre vypĺňajTvary.voidvypĺňajÚtvary() Alias pre vypĺňajTvary.voidvyplnajUtvary(boolean vypĺňaj) Alias pre vypĺňajTvary.voidvypĺňajÚtvary(boolean vypĺňaj) Alias pre vypĺňajTvary.booleanvyplnaTvary() Alias pre vypĺňaTvary.booleanvypĺňaTvary()Zistí, či je aktivované vypĺňanie tvarov generovaných robotom alebo nie.booleanvyplnaUtvary() Alias pre vypĺňaTvary.booleanvypĺňaÚtvary() Alias pre vypĺňaTvary.voidvyplnCestu() Alias pre vyplňCestu.voidvyplňCestu()Ukončí záznam cesty (ak prebieha) a vyplní plochu, ktorú zaznamenaná cesta vymedzuje aktuálnou farbou robota.ShapevyplnElipsu() Alias pre vyplňElipsu.ShapevyplňElipsu()Vyplní elipsu so stredom na mieste robota, pootočenú v smere robota, s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeruShapevyplnElipsu(double pomer) Alias pre vyplňElipsu.ShapevyplňElipsu(double pomer)Vyplní elipsu so stredom na mieste robota, pootočenú v smere robota, s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeruShapevyplnElipsu(double a, double b) Alias pre vyplňElipsu.ShapevyplňElipsu(double a, double b)Vyplní elipsu so zadanými rozmermi, so stredom na mieste robota a pootočenú v smere robota (predvolený smer robota je 90°)ShapevyplnenaElipsa() Alias pre vyplňElipsu.ShapevyplnenáElipsa() Alias pre vyplňElipsu.ShapevyplnenaElipsa(double pomer) Alias pre vyplňElipsu.ShapevyplnenáElipsa(double pomer) Alias pre vyplňElipsu.ShapevyplnenaElipsa(double a, double b) Alias pre vyplňElipsu.ShapevyplnenáElipsa(double a, double b) Alias pre vyplňElipsu.ShapevyplnenaHviezda() Alias pre vyplňHviezdu.ShapevyplnenáHviezda() Alias pre vyplňHviezdu.ShapevyplnenaHviezda(double polomer) Alias pre vyplňHviezdu.ShapevyplnenáHviezda(double polomer) Alias pre vyplňHviezdu.ShapevyplnenehoObdlznika() Alias pre vyplňObdĺžnik.ShapevyplnenehoObdlznika(double pomer) Alias pre vyplňObdĺžnik.ShapevyplnenehoObdlznika(double a, double b) Alias pre vyplňObdĺžnik.ShapevyplnenéhoObdĺžnika() Alias pre vyplňObdĺžnik.ShapevyplnenéhoObdĺžnika(double pomer) Alias pre vyplňObdĺžnik.ShapevyplnenéhoObdĺžnika(double a, double b) Alias pre vyplňObdĺžnik.ShapevyplnenehoStvorca() Alias pre vyplňŠtvorec.ShapevyplnenehoStvorca(double polomer) Alias pre vyplňŠtvorec.ShapevyplnenéhoŠtvorca() Alias pre vyplňŠtvorec.ShapevyplnenéhoŠtvorca(double polomer) Alias pre vyplňŠtvorec.ShapevyplnenejElipsy() Alias pre vyplňElipsu.ShapevyplnenejElipsy(double pomer) Alias pre vyplňElipsu.ShapevyplnenejElipsy(double a, double b) Alias pre vyplňElipsu.ShapevyplnenejHviezdy() Alias pre vyplňHviezdu.ShapevyplnenejHviezdy(double polomer) Alias pre vyplňHviezdu.ShapevyplnenuElipsu() Alias pre vyplňElipsu.ShapevyplnenúElipsu() Alias pre vyplňElipsu.ShapevyplnenuElipsu(double pomer) Alias pre vyplňElipsu.ShapevyplnenúElipsu(double pomer) Alias pre vyplňElipsu.ShapevyplnenuElipsu(double a, double b) Alias pre vyplňElipsu.ShapevyplnenúElipsu(double a, double b) Alias pre vyplňElipsu.ShapevyplnenuHviezdu() Alias pre vyplňHviezdu.ShapevyplnenúHviezdu() Alias pre vyplňHviezdu.ShapevyplnenuHviezdu(double polomer) Alias pre vyplňHviezdu.ShapevyplnenúHviezdu(double polomer) Alias pre vyplňHviezdu.ShapevyplnenyObdlznik() Alias pre vyplňObdĺžnik.ShapevyplnenyObdlznik(double pomer) Alias pre vyplňObdĺžnik.ShapevyplnenyObdlznik(double a, double b) Alias pre vyplňObdĺžnik.ShapevyplnenýObdĺžnik() Alias pre vyplňObdĺžnik.ShapevyplnenýObdĺžnik(double pomer) Alias pre vyplňObdĺžnik.ShapevyplnenýObdĺžnik(double a, double b) Alias pre vyplňObdĺžnik.ShapevyplnenyStvorec() Alias pre vyplňŠtvorec.ShapevyplnenyStvorec(double polomer) Alias pre vyplňŠtvorec.ShapevyplnenýŠtvorec() Alias pre vyplňŠtvorec.ShapevyplnenýŠtvorec(double polomer) Alias pre vyplňŠtvorec.ShapevyplnHviezdu() Alias pre vyplňHviezdu.ShapevyplňHviezdu()Vyplní hviezdu so stredom na mieste robota, obrátenú v smere robota a určenú rozmerom opísanej kružnice s polomerom veľkosti robotaShapevyplnHviezdu(double polomer) Alias pre vyplňHviezdu.ShapevyplňHviezdu(double polomer)Vyplní päťcípu hviezdu so stredom na mieste robota, orientovanú v smere robota a určenú polomerom opísanej kružniceShapevyplnObdlznik() Alias pre vyplňObdĺžnik.ShapevyplnObdlznik(double pomer) Alias pre vyplňObdĺžnik.ShapevyplnObdlznik(double a, double b) Alias pre vyplňObdĺžnik.ShapevyplňObdĺžnik()Vyplní obdĺžnik so stredom na mieste robota, obrátený v smere robota a určený rozmermi vpísanej elipsyShapevyplňObdĺžnik(double pomer)Vyplní obdĺžnik so stredom na mieste robota, obrátený v smere robota a určený rozmermi vpísanej elipsyShapevyplňObdĺžnik(double a, double b)Vyplní obdĺžnik so stredom na mieste robota, obrátený v smere robota a určený rozmermi vpísanej elipsy (predvolený smer robota je 90°)voidvyplnOblast(Area oblasť) Alias pre vyplňOblasť.voidvyplňOblasť(Area oblasť)Vyplní plochu zadanej oblasti farbou nastavenou pre tento robot, pričom vypĺňanú oblasť rotuje podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť) a posúva ju o súradnice robota na plátne (stred sa nachádza v bode [0, 0] – v strede plátna; ak je robot v strede plátna, poloha oblasti sa nezmení).voidvyplnOblast(Area oblasť, Image výplň) Alias pre vyplňOblasť.voidvyplňOblasť(Area oblasť, Image výplň)Vyplní plochu zadanej oblasti zadanou textúrou, pričom oblasť rotuje podľa smeru[1] robota a posúva ju o súradnice[2] robota na plátne.voidvyplnOblast(Area oblasť, String súbor) Alias pre vyplňOblasť.voidvyplňOblasť(Area oblasť, String súbor)Vyplní plochu zadanej oblasti zadanou textúrou, pričom oblasť rotuje podľa smeru[1] robota a posúva ju o súradnice[2] robota na plátne.ShapevyplnStvorec() Alias pre vyplňŠtvorec.ShapevyplnStvorec(double polomer) Alias pre vyplňŠtvorec.ShapevyplňŠtvorec()Vyplní štvorec so stredom na mieste robota, obrátený v smere robota a určený polomerom vpísanej kružnice s polomerom veľkosti robotaShapevyplňŠtvorec(double polomer)Vyplní štvorec so stredom na mieste robota, obrátený v smere robota a určený polomerom vpísanej kružniceShapevyplnTvar(Shape tvar) Alias pre vyplňTvar.ShapevyplňTvar(Shape tvar)Vyplní plochu zadaného tvaru farbou nastavenou pre tento robot.ShapevyplnTvar(Shape tvar, boolean upravRobotom) Alias pre vyplňTvar.ShapevyplňTvar(Shape tvar, boolean upravRobotom)Vyplní plochu zadaného tvaru farbou nastavenou pre tento robot.ShapevyplnTvar(Shape tvar, Image výplň) Alias pre vyplňTvar.ShapevyplňTvar(Shape tvar, Image výplň)Vyplní plochu zadaného tvaru zadanou textúrou.ShapevyplnTvar(Shape tvar, Image výplň, boolean upravRobotom) Alias pre vyplňTvar.ShapevyplňTvar(Shape tvar, Image výplň, boolean upravRobotom)Vyplní plochu zadaného tvaru zadanou textúrou.ShapevyplnTvar(Shape tvar, String súbor) Alias pre vyplňTvar.ShapevyplňTvar(Shape tvar, String súbor)Vyplní plochu zadaného tvaru zadanou textúrou.ShapevyplnTvar(Shape tvar, String súbor, boolean upravRobotom) Alias pre vyplňTvar.ShapevyplňTvar(Shape tvar, String súbor, boolean upravRobotom)Vyplní plochu zadaného tvaru zadanou textúrou.voidvypniGyroskop()Vypne gyroskopické vyvažovanie kreslenia tvaru.voidvypniOhranicenie() Alias pre vypniOhraničenie.voidvypniOhraničenie()Dočasne vypne ohraničenie robota, ak je zapnuté.doublevyska() Alias pre výška.voidvyska(double výška) Alias pre výška.intvyskaRiadka() Alias pre výškaRiadka.voidvyssie() Alias pre vyššie.doublevýška() Vráti aktuálnu výšku robota.voidvýška(double výška) Nastaví novú výšku robota.intvýškaRiadka()Zistí výšku riadka textu v bodoch pri použití aktuálneho typu písma.voidvyššie()Presunie tento robot o úroveň vyššie v rámci poradia kreslenia robotov s ohľadom na umiestnenie robotov do vrstiev.Zoznam<Bod>vytvorDrahu() Alias pre vytvorDráhu.Zoznam<Bod>vytvorDráhu()Zoznam<Bod>vytvorDrahu(double zrnitosť) Alias pre vytvorDráhu.Zoznam<Bod>vytvorDráhu(double zrnitosť)Vytvorí z aktuálnej cesty dráhu so zadanou zrnitosťou.Zoznam<Bod>vytvorDrahu(Shape tvar) Alias pre vytvorDráhu.Zoznam<Bod>vytvorDráhu(Shape tvar)Vytvorí zo zadaného tvaru dráhu so zrnitosťou rovnou hodnote aktuálnej rýchlosti robota.Zoznam<Bod>vytvorDrahu(Shape tvar, double zrnitosť) Alias pre vytvorDráhu.Zoznam<Bod>vytvorDráhu(Shape tvar, double zrnitosť)Vytvorí zo zadaného tvaru dráhu so zadanou zrnitosťou.Zoznam<Double>vytvorMapuSmerov()Zoznam<Double>vytvorMapuSmerov(double zrnitosť)Vytvorí z aktuálnej cesty dráhu so zadanou zrnitosťou a z nej vytvorí mapu smerov, ktoré budú použité pri pohybe robota po jeho aktuálne dráhe.Zoznam<Double>vytvorMapuSmerov(Shape tvar)Vytvorí zo zadaného tvaru dráhu so zrnitosťou rovnou hodnote aktuálnej rýchlosti robota a z nej vytvorí mapu smerov, ktoré budú použité pri pohybe robota po jeho aktuálne dráhe.Zoznam<Double>vytvorMapuSmerov(Shape tvar, double zrnitosť)Vytvorí zo zadaného tvaru dráhu so zadanou zrnitosťou a z nej vytvorí mapu smerov, ktoré budú použité pri pohybe robota po jeho aktuálne dráhe.voidvyzviRobotov() Alias pre vyzviRoboty.voidvyzviRobotov(int kľúč) Alias pre vyzviRoboty.voidvyzviRobotov(int kľúč, boolean obrátene) Alias pre vyzviRoboty.voidvyzviRoboty()Spustením tejto metódy sa pre každý robot (podľa ich aktuálneho poradia) vykoná reakciaprijatieVýzvy, pričom autorom výzvy bude tento robot a hodnota argumentukľúčbude rovná-1.voidvyzviRoboty(int kľúč)Spustením tejto metódy sa pre každý robot (podľa ich aktuálneho poradia) vykoná reakciaprijatieVýzvy, pričom autorom výzvy bude tento robot.voidvyzviRoboty(int kľúč, boolean obrátene)Spustením tejto metódy sa pre každý robot (podľa ich aktuálneho poradia) vykoná reakciaprijatieVýzvy, pričom autorom výzvy bude tento robot.voidvzad()Prikáže robotu, aby cúvol z aktuálneho miesta o hodnotu svojej veľkosti (v aktuálnom smere).voidvzad(double dĺžka)Prikáže robotu, aby cúvol z aktuálneho miesta o zadanú dĺžku (v aktuálnom smere).doublevzdialenost() Alias pre vzdialenosť.doublevzdialenosť()Zistí, aká je vzdialenosť tohto robota od stredu súradnicovej sústavy.doublevzdialenostK(double súradnicaBoduX, double súradnicaBoduY) Alias pre vzdialenosťOd.doublevzdialenosťK(double súradnicaBoduX, double súradnicaBoduY) Alias pre vzdialenosťOd.doublevzdialenostK(Poloha objekt) Alias pre vzdialenosťOd.doublevzdialenosťK(Poloha objekt) Alias pre vzdialenosťOd.doublevzdialenostK(Shape tvar) Alias pre vzdialenosťOd.doublevzdialenosťK(Shape tvar) Alias pre vzdialenosťOd.doublevzdialenostKMysi() Alias pre vzdialenosťOdMyši.doublevzdialenosťKMyši() Alias pre vzdialenosťOdMyši.doublevzdialenostOd(double súradnicaBoduX, double súradnicaBoduY) Alias pre vzdialenosťOd.doublevzdialenosťOd(double súradnicaBoduX, double súradnicaBoduY)Zistí vzdialenosť medzi týmto robotom a zadanými súradnicami na podlahe (strope).doublevzdialenostOd(Poloha objekt) Alias pre vzdialenosťOd.doublevzdialenosťOd(Poloha objekt)Zistí vzdialenosť medzi týmto a zadaným objektom.doublevzdialenostOd(Shape tvar) Alias pre vzdialenosťOd.doublevzdialenosťOd(Shape tvar)Zistí vzdialenosť medzi týmto robotom a stredom hraníc[1] zadaného tvaru.doublevzdialenostOdMysi() Alias pre vzdialenosťOdMyši.doublevzdialenosťOdMyši()Zistí vzdialenosť medzi týmto robotom a aktuálnymi súradnicami myši.voidvzniklaChyba(GRobotException.Chyba chyba)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.double[]vzorCiary() Alias pre vzorČiary.voidvzorCiary(double[] novýVzor) Alias pre vzorČiary.voidvzorCiary(double začiatokVzoru, double... pokračovanieVzoru) Alias pre vzorČiary.double[]vzorČiary()Vráti aktuálny vzor čiary pera.voidvzorČiary(double[] novýVzor)Upraví vzor čiary pera.voidvzorČiary(double začiatokVzoru, double... pokračovanieVzoru)Upraví vzor čiary pera.double[]vzorPera()Vráti aktuálny vzor čiary pera.voidvzorPera(double[] novýVzor)Upraví vzor čiary pera.voidvzorPera(double začiatokVzoru, double... pokračovanieVzoru)Upraví vzor čiary pera.voidza(GRobot ktorého)Presunie tento robot za zadaný robot (z pohľadu zoradenia robotov vo vnútornom zozname robotov, pričom umiestnenie robotov do vrstiev zostane neovplyvnené).voidzabrzdi()Prikáže robotu začať brzdiť a automaticky zastaviť pri dosiahnutí nulovej rýchlostivoidzabrzdi(double zrýchlenie)Prikáže robotu začať brzdiť so zadaným „zrýchlením“ (spomalením) a automaticky zastaviť pri dosiahnutí nulovej rýchlosti.voidzacniCestu() Alias pre začniCestu.voidzacniCestu(boolean rešpektujPolohuPera) Alias pre začniCestu.voidzacniCuvat() Alias pre začniCúvať.voidzacniKreslenie() Alias pre začniKreslenie.voidzacniKreslenie(Graphics2D g2d) Alias pre začniKreslenie.voidzačniCestu()Začne záznam novej cesty robota.voidzačniCestu(boolean rešpektujPolohuPera)Začne záznam novej cesty robota.voidzačniCúvať()Metóda slúži na aktiváciu robota, ktorý má nenulové zrýchlenievoidzačniKreslenie()Táto metóda je určená na implementáciu vlastného kreslenia robotom s použitím interného (aktívneho) grafického objektu robota dostupného aj prostredníctvom metódygrafika.voidzačniKreslenie(Graphics2D g2d)Táto metóda je určená na implementáciu vlastného kreslenia robotom s použitím externého grafického objektuGraphics2D.voidzadanieZnaku()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidzachovajFarbuDoma()Po použití tejto metódy nebude farba robota pri použití niektorej modifikácie metódydomovovplyvňovaná.voidzachovajHrubkuCiaryDoma() Alias pre zachovajHrúbkuČiaryDoma.voidzachovajHrúbkuČiaryDoma()Po použití tejto metódy nebude hrúbka pera robota pri použití niektorej modifikácie metódydomovovplyvňovaná.voidzachovajHrubkuPeraDoma() Alias pre zachovajHrúbkuPeraDoma.voidzachovajHrúbkuPeraDoma()Po použití tejto metódy nebude hrúbka pera robota pri použití niektorej modifikácie metódydomovovplyvňovaná.voidzachovajPeroDoma()Po použití tejto metódy nebude stav polohy pera pri použití niektorej modifikácie metódydomovovplyvňovaný.voidzachovajPismoDoma() Alias pre zachovajPísmoDoma.voidzachovajPísmoDoma()Po použití tejto metódy nebude písmo robota pri použití niektorej modifikácie metódydomovovplyvňovaná.voidzachovajPomerDoma()Po použití tejto metódy nebude pomer veľkosti robota (šírky a výšky) pri použití niektorej modifikácie metódydomovovplyvňovaný.voidzachovajPootocenieTvaruDoma() Alias pre zachovajPootočenieTvaruDoma.voidzachovajPootočenieTvaruDoma()Po použití tejto metódy nebude stav pootočenia tvaru robota pri použití niektorej modifikácie metódydomovovplyvňovaný.voidzachovajPriehladnostDoma() Alias pre zachovajPriehľadnosťDoma.voidzachovajPriehľadnosťDoma()Po použití tejto metódy nebude priehľadnosť robota pri použití niektorej modifikácie metódydomovovplyvňovaná.voidzachovajRozmerDoma()Volanie tejto metódy je ekvivalentné volaniu tejto dvojice metód:zachovajVeľkosťDomazachovajPomerDomaPoznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).voidzachovajVelkostDoma() Alias pre zachovajVeľkosťDoma.voidzachovajVeľkosťDoma()Po použití tejto metódy nebude veľkosť robota pri použití niektorej modifikácie metódydomovovplyvňovaná.voidzachovajViditelnostDoma() Alias pre zachovajViditeľnosťDoma.voidzachovajViditeľnosťDoma()Po použití tejto metódy nebude viditeľnosť robota pri použití niektorej modifikácie metódydomovovplyvňovaná.voidzachovajVzorCiaryDoma() Alias pre zachovajVzorČiaryDoma.voidzachovajVzorČiaryDoma()Zruší zmenu parametrov čiarkovania, vrátane jeho posunu, pri prechode robota domov.voidzachovajVzorPeraDoma()Zruší zmenu parametrov čiarkovania, vrátane jeho posunu, pri prechode robota domov.voidzamestnaj(Oblasť oblasť)Zamestná tento robot na účely tvorby, prípadne kreslenia, zadanej oblasti.booleanzamestnany() Alias pre zamestnaný.booleanzamestnaný()Overí, či je tento robot zamestnaný pre potreby niektorej oblasti.booleanzamestnany(Oblasť oblasť) Alias pre zamestnaný.booleanzamestnaný(Oblasť oblasť)Overí, či je tento robot zamestnaný pre potreby určenej oblasti.double[]zaoblenie()Zistí aktuálne hodnoty šírky a výšky zaoblenia rohov pravouhlých útvarov generovaných robotom (štvorca a obdĺžnika).voidzaoblenie(double zaoblenie)Nastaví hodnoty zaoblenia rohov pravouhlých útvarov generovaných robotom (štvorca a obdĺžnika).voidzaoblenie(double zaoblenieX, double zaoblenieY)Nastaví šírku a výšku zaoblenia rohov pravouhlých útvarov generovaných robotom (štvorca a obdĺžnika).doublezaoblenieX() Zistí aktuálnu hodnotu šírky
zaoblenia rohov pravouhlých útvarov generovaných robotom
(štvorca a obdĺžnika).voidzaoblenieX(double zaoblenieX) Upraví šírku zaoblenia rohov
pravouhlých útvarov generovaných robotom (štvorca
a obdĺžnika).doublezaoblenieY() Zistí aktuálnu hodnotu výšky
zaoblenia rohov pravouhlých útvarov generovaných robotom
(štvorca a obdĺžnika).voidzaoblenieY(double zaoblenieY) Upraví výšku zaoblenia rohov
pravouhlých útvarov generovaných robotom (štvorca
a obdĺžnika).voidzapisKonfiguraciu(Súbor subor) Alias pre zapíšKonfiguráciu.voidzapíšKonfiguráciu(Súbor súbor)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidzapniOhranicenie() Alias pre zapniOhraničenie.voidzapniOhraničenie()Opätovne zapne ohraničenie robota, ak bolo predtým aktívne, ale bolo vypnuté metódouvypniOhraničenie.voidzastav()Deaktivuje robot (napríklad po dosiahnutí cieľa).voidzastav(boolean ajČasovač)Metóda má rovnaký účel ako metódazastav()s tým, že dovoľuje programátorovi určiť, či má byť automaticky spustený časovač (ak už nie je v činnosti).voidzastav(int trvaniePasivity)Metóda má rovnaký účel ako metódazastav(), ibaže dovoľuje programátorovi naplánovať automatickú aktiváciu.voidzastav(int trvaniePasivity, boolean ajČasovač)Metóda spája funkcionalitu metódzastav(trvaniePasivity)azastav(ajČasovač).voidzastavenie()Táto metóda je predvolene prázdna.voidzastavenieAnimacie(Obrázok obrázok) Alias pre zastavenieAnimácie.voidzastavenieAnimácie(Obrázok obrázok)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidzastaveniePosunu()Táto metóda je predvolene prázdna.booleanzastaviPoSpomaleni() Alias pre zastavíPoSpomalení.booleanzastavíPoSpomalení()Zistí, či má robot prikázané automaticky zastaviť pri najbližšom dosiahnutí nulovej rýchlosti.booleanzastaviPoSpomaleniPosunu() Alias pre zastavíPoSpomaleníPosunu.booleanzastavíPoSpomaleníPosunu()Zistí, či má robot prikázané automaticky zastaviť posun pri najbližšom dosiahnutí nulovej rýchlosti posunu.booleanzastaviVCieli() Alias pre zastavíVCieli.booleanzastavíVCieli()Zistí, či má robot prikázané automaticky zastaviť po dosiahnutí cieľa.voidzastavNaDrahe() Alias pre zastavNaDráhe.voidzastavNaDráhe()Deaktivuje robot a ukončí jeho pohyb po dráhe.voidzastavPoSpomaleni() Alias pre zastavPoSpomalení.voidzastavPoSpomalení()Prikáže robotu, aby najbližšie, keď dosiahne nulovú rýchlosť automaticky zastavil.voidzastavPoSpomaleniPosunu() Alias pre zastavPoSpomaleníPosunu.voidzastavPoSpomaleníPosunu()Prikáže robotu, aby najbližšie, keď dosiahne nulovú rýchlosť posunu automaticky zastavil posun.voidzastavPosun()Volanie tejto metódy (či už automatické alebo ručné) spôsobí zastavenie pohybu v kolmom smere voči aktuálnej orientácii robota – zastavenie posunu.booleanzatvorenie() Alias pre zavretie.booleanzavretie()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidzavriCestu() Alias pre uzavriCestu.voidzdvihniPero()Zdvihne pero tohto robota z plátna podlahy alebo stropu.voidzdvihniPeroDoma()Spôsobí, že odteraz vždy pri použití niektorej modifikácie metódydomovzdvihne robot pero z plátna.booleanzmenaFokusu(boolean vpred)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.booleanzmenaPolohy()Táto metóda je predvolene prázdna.voidzmenaPosunuListy() Alias pre zmenaPosunuLišty.voidzmenaPosunuLišty()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.booleanzmenaUhla()Táto metóda je predvolene prázdna.voidzmenaVelkostiOkna() Alias pre zmenaVeľkostiOkna.voidzmenaVeľkostiOkna()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidzobraz()Zobrazí tento robot.voidzobraz(boolean zobraz)Zobrazí alebo skryje tento robot podľa hodnoty parametrazobraz.voidzobrazDoma()Spôsobí, že odteraz sa robot vždy pri použití niektorej modifikácie metódydomovzobrazí.voidzobrazenie()Táto metóda je predvolene prázdna.voidzobrazenieOkna()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.booleanzobrazeny() Alias pre zobrazený.booleanzobrazený()Zistí, či je robot viditeľný alebo skrytý.BooleanzobrazenyDoma() Alias pre zobrazenýDoma.BooleanzobrazenýDoma()Zistí, či sa mení viditeľnosť robota pri prechode na domovskú pozíciu.voidzrusCestu() Alias pre zrušCestu.voidzrusCiel() Alias pre zrušCieľ.voidzrusCiel(boolean zastav) Alias pre zrušCieľ.voidzrusCielovuFarbu() Alias pre zrušCieľovúFarbu.voidzrusCielovuFarbuDoma() Alias pre zrušCieľovúFarbuDoma.voidzrusCielovuFarbuDoma(boolean zruš) Alias pre zrušCieľovúFarbuDoma.voidzrusenieUdajov() Alias pre zrušenieÚdajov.voidzrusenieVstupu() Alias pre zrušenieÚdajov.booleanzrusiCielovuFarbuDoma() Alias pre zrušCieľovúFarbuDoma.voidzrusKlucovuFazuDrahy(int fáza) Alias pre zrušKľúčovúFázuDráhy.voidzrusKlucovuFazuDrahy(Poloha poloha) Alias pre zrušKľúčovúFázuDráhy.voidzrusKlucovuFazuDrahy(Poloha poloha, double okruh) Alias pre zrušKľúčovúFázuDráhy.voidzrusKoliznuOblast() Alias pre zrušKolíznuOblasť.voidzrusNater() Alias pre zrušNáter.voidzrusSledovanieCiela() Alias pre zrušCieľ.voidzrusSledovanieCiela(boolean zastav) Alias pre zrušCieľ.voidzrusSpojnice() Alias pre zrušSpojnice.voidzrusSpojnicu(GRobot cieľ) Alias pre zrušSpojnicu.voidzrušCestu()Ukončí záznam cesty (ak prebieha) a zmaže zaznamenanú cestu (aj v prípade, že záznam neprebiehal).voidzrušCieľ()Vypne smerovanie do cieľa, ktoré bolo zapnuté niektorou z verzií metódycieľ.voidzrušCieľ(boolean zastav)Vypne smerovanie do cieľa, ktoré bolo zapnuté niektorou z verzií metódycieľ.voidzrušCieľovúFarbu()Zruší nastavenie cieľovej farby robota.voidzrušCieľovúFarbuDoma()Po použití tejto metódy bude cieľová farba robota pri použití niektorej modifikácie metódydomovzrušená.voidzrušCieľovúFarbuDoma(boolean zruš)Táto metóda umožňuje nastaviť správanie zmeny cieľovej farby robota po prechode na domovskú pozíciu.voidzrušenieÚdajov()Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.voidzrušenieVstupu() Alias pre zrušenieÚdajov.booleanzrušíCieľovúFarbuDoma()Overí, či bude po použití niektorej modifikácie metódydomovcieľová farba zrušená, alebo nie.voidzrušKľúčovúFázuDráhy(int fáza)Zruší označenie zadanej fázy dráhy za kľúčové.voidzrušKľúčovúFázuDráhy(Poloha poloha)Zruší označenie takej fázy dráhy za kľúčové, ktorej poloha je najbližšie k zadanej polohe, pričom sú počas hľadania vhodnej fázy na zrušenie brané do úvahy len už označené fázy.voidzrušKľúčovúFázuDráhy(Poloha poloha, double okruh)Zruší označenie takej fázy dráhy za kľúčové, ktorej poloha je najbližšie k zadanej polohe v rámci zadaného okruhu, pričom sú počas hľadania vhodnej fázy na zrušenie brané do úvahy len už označené fázy.voidzrušKolíznuOblasť() Zruší kolíznu oblasť.voidzrušNáter()Zruší definíciu náteru grafického robota.voidzrušSledovanieCieľa() Alias pre zrušCieľ.voidzrušSledovanieCieľa(boolean zastav) Alias pre zrušCieľ.voidzrušSpojnice()Zruší všetky spojnice smerujúce k tomuto aj od tohto robota.voidzrušSpojnicu(GRobot cieľ)Zruší jestvujúcu spojnicu medzi týmto a zadaným robotom.doublezrychlenie() Alias pre zrýchlenie.doublezrýchlenie() Zistí hodnotu zrýchlenia tohto robota.voidzrychlenie(double zrýchlenie) Alias pre zrýchlenie.voidzrýchlenie(double zrýchlenie) Nastaví robotu novú hodnotu
zrýchlenia.voidzrychlenie(double zrýchlenie, boolean aktivuj) Alias pre zrýchlenie.voidzrýchlenie(double zrýchlenie, boolean aktivuj)Metóda funguje rovnako ako metódazrýchlenie(double zrýchlenie), ale dovoľuje programátorovi určiť, či smie byť robot (v prípade zadania nenulového zrýchlenia) aktivovaný.doublezrychlenieOtacania() Alias pre uhlovéZrýchlenie.voidzrychlenieOtacania(double uhlovéZrýchlenie) Alias pre uhlovéZrýchlenie.voidzrychlenieOtacania(double uhlovéZrýchlenie, boolean aktivuj) Alias pre uhlovéZrýchlenie.doublezrýchlenieOtáčania() Alias pre uhlovéZrýchlenie.voidzrýchlenieOtáčania(double uhlovéZrýchlenie) Alias pre uhlovéZrýchlenie.voidzrýchlenieOtáčania(double uhlovéZrýchlenie, boolean aktivuj) Alias pre uhlovéZrýchlenie.doublezrychleniePosunu() Alias pre zrýchleniePosunu.doublezrýchleniePosunu() Zistí hodnotu zrýchlenia posunu tohto robota.voidzrychleniePosunu(double zrýchleniePosunu) Alias pre zrýchleniePosunu.voidzrýchleniePosunu(double zrýchleniePosunu) Nastaví robotu novú hodnotu
zrýchlenia posunu.voidzrychleniePosunu(double zrýchleniePosunu, boolean aktivuj) Alias pre zrýchleniePosunu.voidzrýchleniePosunu(double zrýchleniePosunu, boolean aktivuj)Metóda funguje rovnako ako metódazrýchleniePosunu(double zrýchlenie), ale dovoľuje programátorovi určiť, či smie byť robot (v prípade zadania nenulového zrýchlenia posunu) aktivovaný.
-
-
-
Podrobnosti atribútov
-
svet
public static final Svet svet
Rámec hlavného okna aplikácie. Má využitie pri programovaní vlastného používateľského rozhrania aplikácie, úprave hlavnej ponuky, ikony a podobne…
Poznámka: Na prístup k statickým prvkom triedy
Svetby ste mali používať syntax:Svet.«prvok triedy»
-
podlaha
public static final Plátno podlaha
Reprezentácia podlahy tohto sveta. Umožňuje vykonávať s podlahou rôzne akcie, napríklad zálohovanie do a obnovu zo záložnej pamäte, čo sa dá využiť na rýchle kreslenie podkladu a podobne. (Podrobnosti sú v opise triedy
Plátno.)
-
strop
public static final Plátno strop
Reprezentácia stropu tohto sveta. Umožňuje vykonávať so stropom rôzne akcie, napríklad zálohovanie do a obnovu zo záložnej pamäte, čo sa dá využiť napríklad na rýchle nakreslenie kulís objektov permanentne prítomných v popredí a podobne. (Podrobnosti sú v opise triedy
Plátno.)
-
súbor
public final Súbor súbor
Každý robot smie otvoriť jeden textový (prípadne konfiguračný) súbor na čítanie alebo zápis. Podrobnosti o používaní tejto inštancie obsahuje opis triedy
Súbor.
-
schránka
public static final Schránka schránka
Statická inštancia triedy
Schránka, ktorá umožňuje pracovať so schránkou operačného systému.
-
svgPodpora
public static final SVGPodpora svgPodpora
Statická inštancia triedy
SVGPodpora, ktorá zastrešuje podporu importu a exportu vektorových tvarov vo formáte SVG.
-
svgExport
public SVGPodpora svgExport
Atribút na export kreslenia tohto robota do zadanej inštancie
SVGPodpora. Predvolená hodnota jenull. Keď je do atribútu vložená ľubovoľná inštancia triedySVGPodpora, tak sa všetky kreslené tvary, texty a obrázky počas kreslenia pridajú do vloženej inštancie cez metódy:pridaj(tvar, tvorca, atribúty),pridaj(tvar, atribúty)(len v prípade kreslenia pôsobiska, pri ktorom sú vlastnosti tvorcu irelevantné),pridajText(text, tvorca, atribúty)- a
pridajObrázok(obrázok, tvorca, atribúty),
kde tvorcom bude tento robot.
Pozor! Tento atribút nie je statický, na rozdiel od rovnomenného atribútu sveta (pozri
Svet.svgExport). To znamená, že týmto atribútom sa dá nastaviť alebo zrušiť export každému robotu individuálne.Upozornenie: Všetky metódy sa usilujú pridávať kreslené objekty v správnom kontexte – kreslenie na podlahu, strop, svet… Zatiaľ nie je dokončená správna implementácia kreslenia do obrázka, ktorá bude časom pridávať klonovateľné definície, ale zatiaľ iba kreslí objekty v samostatnej vrstve. Odporúčame sa preto zatiaľ vyhnúť kresleniu do obrázkov počas exportu do formátu SVG, pretože toto správanie sa v budúcnosti zmení.
Príklad:
Tento príklad vytvorí jednoduché testovacie prostredie na skúmanie možností atribútu
svgExport. Zapína príkazový riadok rámca, uchováva jeho históriu a implementuje viacero dodatočných pomocných príkazov – na mazanie textov konzoly, obsahu statickej inštancie SVG podpory, výpis obsahu SVG podpory, uloženie SVG súboru a špeciálny testovací prípad „alfa beta,“ ktorého využitie v podstate vyžaduje reštart prostredia, lebo vytvára inštancie robotov, ktoré sa nedajú odstrániť. (Tu ponechávame priestor na tvorivosť – vedeli by ste to doriešiť?)importjava.awt.Color;importjava.awt.Shape;importknižnica.*;publicclassTestSVGExportextendsGRobot{// Konštruktor.privateTestSVGExport() {super(Svet.šírkaZariadenia(),Svet.výškaZariadenia());Svet.maximalizuj();Svet.začniVstup();Svet.neskrývajVstupnýRiadok();interaktívnyRežim(true);Svet.aktivujHistóriuVstupnéhoRiadka();Svet.uchovajHistóriuVstupnéhoRiadka();Svet.skratkyStropu(true);strop.automatickéZobrazovanieLíšt(true);strop.zmeňOdsadenieSprava(30);strop.písmo("Segoe UI Light",14);skry();svgExport=svgPodpora;Svet.svgExport=svgPodpora; }
// Spustí skript://// • ak je parameter súbor true, tak je reťazec obsah považovaný za názov// súboru so skriptom;// • ak je parameter súbor false, tak je reťazec obsah považovaný skript// priamo určený na vykonanie//// a vypíše prípadné chyby.publicstaticvoidskript(Stringobsah,booleansúbor) {Skriptskript =Svet.vyrobSkript(obsah, súbor); skript.vypíš();intriadok = skript.vykonaj();if(riadok >0) { výpisChyby(); chyba(Svet.S("Riadok: ", riadok)); } }
// Príkaz na výpis chybových hlásení.publicstaticvoidchyba(Stringchyba) {Farbaf =strop.farbaTextu();strop.farbaTextu(Skript.farbaLadenia("chyba"));Svet.vypíšRiadok(chyba);strop.farbaTextu(f); }// Nový príkaz: cls – anglická skratka „clear screen“ používaná na// vymazanie konzoly; keďže „vymaž“ vymaže texty aj grafiku a „vymaž// texty“ je presmerované do metódy: Súbor.vymaž("");publicstaticvoidcls() {Svet.vymažTexty(); }// Nový príkaz: clear – vyčistí (vymaže všetky tvary) statickú inštanciu// SVG podpory. (Pozri aj komentár vyššie.)publicstaticvoidclear() {svgPodpora.vymaž(); }// Nový príkaz: vysyp – ekvivalent anglického „dump“ – „vysype“ (vypíše)// aktuálny obsah statickej inštancie SVG podpory.publicstaticvoidvysyp() {Svet.vypíšRiadok(svgPodpora.dajSVG()); }// Nový príkaz: ulož – určený na zjednodušenie ukladania SVG súborov.publicstaticvoiduloz(Stringmeno) { ulož(meno,false); }publicstaticvoidulož(Stringmeno) { ulož(meno,false); }publicstaticvoiduloz(Stringmeno,booleanprepíš) { ulož(meno, prepíš); }publicstaticvoidulož(Stringmeno,booleanprepíš) {if(!prepíš &&Súbor.jestvuje(meno)) { chyba(Svet.S("Súbor", meno,"už jestvuje."));return; }intpočet =svgPodpora.zapíš(meno,null, prepíš);if(0<= počet)Svet.vypíšRiadok("Počet zapísaných tvarov:", počet);elsechyba("Zápis zlyhal."); }// Neúspešné spracovanie potvrdeného príkazu.@OverridepublicvoidpotvrdenieVstupu() { výpisChyby(); }// Vypíše poslednú chybu skriptu.privatestaticvoidvýpisChyby() {intkód =Svet.kódPoslednejChyby();switch(kód) {caseCHYBA_NEZNÁMY_PRÍKAZ: chyba("Neznámy príkaz.");break;caseCHYBA_VYKONANIA_PRÍKAZU:GRobotException.Chybachyba =GRobotException.denník.posledný();for(inti =0;null!= chyba.výnimka&&null== chyba.výnimka.getMessage() && i <3; ++i) { chyba =GRobotException.denník.predchádzajúci();if(GRobotException.denník.prejdenýDokola()) { chyba =null;break; } }if(null== chyba) chyba(Svet.textPoslednejChyby());elseif(null!= chyba.správa) chyba(chyba.správa);elseif(null!= chyba.výnimka&&null!= chyba.výnimka.getMessage()) chyba(chyba.výnimka.getMessage());elsechyba(Svet.textPoslednejChyby());break;default: chyba(Svet.textPoslednejChyby()); } }// Úspešné spracovanie potvrdeného príkazu.@OverridepublicvoidspracovaniePríkazu() {Objecthodnota =Skript.poslednáNávratováHodnota();if(null!= hodnota) {Farbaf =strop.farbaTextu();if((hodnotainstanceofDouble) || (hodnotainstanceofFloat) || (hodnotainstanceofInteger) || (hodnotainstanceofLong)) {strop.farbaTextu(Skript.farbaLadenia("číslo"));Svet.vypíšRiadok(hodnota); }elseif(hodnotainstanceofBoolean) {strop.farbaTextu(Skript.farbaLadenia("číslo"));Svet.vypíšRiadok(hodnota); }elseif(hodnotainstanceofString) {strop.farbaTextu(Skript.farbaLadenia("reťazec"));Svet.vypíšRiadok(hodnota); }elseif(hodnotainstanceofColor) {strop.farbaTextu(Skript.farbaLadenia("farba"));Svet.vypíšRiadok(Farba.farbaNaReťazec((Color)hodnota)); }elseif(hodnotainstanceofShape) {// Ignorované.}else{strop.farbaTextu(purpurová);Svet.vypíšRiadok(hodnota.getClass().getName(),":", hodnota); }strop.farbaTextu(f); } }// Reakcia na tik časovača. Obsahuje len časované prekresľovanie sveta.@Overridepublicvoidtik() {if(Svet.neboloPrekreslené())Svet.prekresli(); }// Hlavná metóda.publicstaticvoidmain(String[] args) {Svet.režimLadenia(true,true);Svet.interaktívnyRežim(true);// Obsluha udalostí ladenia. (Udalosti ladenia je v tomto rámci// možné obsluhovať len takto.)newObsluhaUdalostí() {@Overridepublicbooleanladenie(intriadok,Stringpríkaz,intspráva) {switch(správa) {caseZABRÁNIŤ_VYKONANIU:System.out.println(príkaz);break;caseVYPÍSAŤ_PRÍKAZ:/*case VYPÍSAŤ_SKRIPT:*/returntrue;caseUKONČENIE_CHYBOU: {if(Svet.kódPoslednejChyby() >0) výpisChyby();elsechyba(príkaz);if(riadok >0) chyba(Svet.S("Riadok: ", riadok)); }returnfalse; }returnsuper.ladenie(riadok, príkaz, správa); } };Svet.použiKonfiguráciu("TestSVGExport.cfg");Svet.skry();Svet.nekresli();try{newTestSVGExport(); }catch(Throwablet) { t.printStackTrace(); }Svet.prekresli();Svet.zobraz();Svet.spustiČasovač(0.5); }
// Od tohto miesta nižšie nasledujú všetky potrebné súčasti na// implementáciu vlastného príkazu „alfa beta,“ ktorý naplní statickú// inštanciu SVG podpory tvarmi generovanými dvoma robotmi (alfou// a betou), ktoré kreslia vlastný tvar elipsy s menom uprostred// a orezané spojnice medzi nimi ukončené šípkami. Príkaz po vykonaní// vypíše aktuálny obsah statickej inštancie SVG podpory.// Deklarácie (resp. definície „prázdnych“) robotov:privatestaticGRobotalfa =null, beta =null;// Definícia kreslenia vlastného tvaru robotov (elipsy s menom// robota v strede):privatestaticKreslenieTvarutvarAlfaBeta = r -> { r.elipsa(2); r.text(r.meno()); };// Definícia kreslenia koncových značiek čiar spojníc:privatestaticKreslenieTvarutvarŠípky = r -> { r.vpravo(30); r.dopredu(10); r.zdvihniPero(); r.vzad(10); r.vľavo(60); r.položPero(); r.dopredu(10); };// Samotný príkaz: alfa beta.publicstaticvoidalfaBeta() {// Vytvorenie inštancie alfy, ak nejestvuje:if(null== alfa) alfa =newGRobot() {{meno("Alfa");vlastnýTvar(tvarAlfaBeta);veľkosť(20);skočNa(-100,100);nekresliTvary(); }};// Vytvorenie inštancie bety, ak nejestvuje:if(null== beta) beta =newGRobot() {{meno("Beta");vlastnýTvar(tvarAlfaBeta);veľkosť(30);skočNa(100,100);nekresliTvary(); }};// Vytvorenie (definovanie) spojníc a ich vlastností:if(null!= alfa &&null!= beta) { alfa.spojnica(beta, alfa.elipsa(2), beta.elipsa(2)) .definujZnačkuKonca(tvarŠípky).vysunutie(10); beta.spojnica(alfa, beta.elipsa(2), alfa.elipsa(2)) .definujZnačkuKonca(tvarŠípky).vysunutie(10); }// Vygenerovanie (pridanie) obsahu do statickej inštancie SVG podpory:alfa.svgExport= beta.svgExport=svgPodpora;Svet.prekresli(); alfa.svgExport= beta.svgExport=null;// Výpis aktuálneho obsahu statickej inštancie SVG podpory:skript("cls\nvysyp",false); } }A nasledujúce dva skripty sa s týmto príkladom dajú použiť.
TestExportElipsy.GRScript:hrúbka čiary 2 farba červená veľkosť 20 elipsa 2 obdĺžnik 2 farba modrá veľkosť 30 elipsa 2 obdĺžnik 2 farba zelená vpred 20
TestSVGExport.GRScript:hrúbka čiary 3 farba červená kružnica 50 vpred 50 kruh 25 farba modrá choď po oblúku 45, 25 farba zelená kružnica 50
- Pozri tiež:
Svet.svgExport
-
-
Podrobnosti konštruktorov
-
GRobot
public GRobot()
Predvolený konštruktor nastavujúci predvolené vlastnosti robota. Pri prvom robote sa zároveň vytvorí svet, čo zahŕňa okno aplikácie, podlahu a strop.
Poznámka: Každý vytvorený robot je automaticky zaradený na koniec vnútorného zoznamu robotov. Poradie v tomto zozname je možné dodatočne ovplyvniť metódami
naVrch,naSpodok,vyššie,nižšie,predaza.
-
GRobot
public GRobot(String novýTitulok)
Konštruktor umožňujúci zmenu titulku okna aplikácie sveta. Okrem zmeny titulku okna sa správa rovnako ako predvolený konštruktor.
- Parametre:
novýTitulok– nový titulok hlavného okna
-
GRobot
public GRobot(int nováMaximálnaŠírka, int nováMaximálnaVýška)Konštruktor umožňujúci stanovenie iných rozmerov kresliacich plátien (podlahy a stropu) než predvolená. Aby bol tento konštruktor použiteľný, svet ešte nesmie jestvovať. To znamená, že úprava rozmerov podlahy a stropu je možná len pri prvom vytvorenom robote, inak vznikne výnimka. (Častý spôsob je spustenie príkazu
super(«rozmery plátna»)na začiatku konštruktora hlavného robota.) Ostatné vlastnosti a správanie tohto konštruktora sú rovnaké ako pri predvolenom konštruktore.Upozornenie: Zväčšovanie rozmerov plátna znižuje výkonnosť aplikácie.
V súčasnej verzii programovacieho rámca jestvuje metóda
zmeňRozmeryPlátien, avšak je nevyhnutné ju používať len v odôvodnených prípadoch, keďže zmena rozmerov plátien je komplexný proces.- Parametre:
nováMaximálnaŠírka– nová maximálna šírka kresliacich plátiennováMaximálnaVýška– nová maximálna výška kresliacich plátien- Výnimky:
GRobotException– ak svet už jestvuje- Pozri tiež:
Svet.zmeňRozmeryPlátien(int, int)
-
GRobot
public GRobot(int nováMaximálnaŠírka, int nováMaximálnaVýška, String novýTitulok)Konštruktor umožňujúci stanovenie iných rozmerov kresliacich plátien (podlahy a stropu) než je predvolená a zmenu titulku hlavného okna aplikácie sveta. Aby bol tento konštruktor použiteľný, svet ešte nesmie jestvovať. To znamená, že úprava rozmerov podlahy a stropu je možná len pri prvom vytvorenom robote, inak vznikne výnimka. (Častý spôsob je spustenie príkazu
super(«rozmery plátna a titulok okna»)na začiatku konštruktora hlavného robota.) Ostatné vlastnosti a správanie tohto konštruktora sú podobné ako pri konštruktore prijímajúcom jeden argument (reťazec určujúci nvoý titulok hlavného okna).Upozornenie: Zväčšovanie rozmerov plátna znižuje výkonnosť aplikácie.
V súčasnej verzii programovacieho rámca jestvuje metóda
zmeňRozmeryPlátien, avšak je nevyhnutné ju používať len v odôvodnených prípadoch, keďže zmena rozmerov plátien je komplexný proces.- Parametre:
nováMaximálnaŠírka– nová maximálna šírka kresliacich plátiennováMaximálnaVýška– nová maximálna výška kresliacich plátiennovýTitulok– nový titulok hlavného okna- Výnimky:
GRobotException– ak svet už jestvuje- Pozri tiež:
Svet.zmeňRozmeryPlátien(int, int)
-
-
Podrobnosti metód
-
hrúbkaPera
public double hrúbkaPera()
Čítaj hrúbku čiary pera robota.- Návratová hodnota:
- aktuálna hrúbka čiary pera robota
- Pozri tiež:
hrúbkaČiary(),hrúbkaPera(double),hrúbkaČiary(double),predvolenáHrúbkaPera(),predvolenáHrúbkaČiary(),čiara(),čiara(Stroke),hrúbkaPeraDoma,vzorČiary(double, double...),vzorPera(double, double...)
-
hrubkaPera
public double hrubkaPera()
Alias pre hrúbkaPera.
-
hrúbkaČiary
public double hrúbkaČiary()
Čítaj hrúbku čiary pera robota.- Návratová hodnota:
- aktuálna hrúbka čiary pera robota
- Pozri tiež:
hrúbkaČiary(),hrúbkaPera(double),hrúbkaČiary(double),predvolenáHrúbkaPera(),predvolenáHrúbkaČiary(),čiara(),čiara(Stroke),hrúbkaČiaryDoma,vzorČiary(double, double...),vzorPera(double, double...)
-
hrubkaCiary
public double hrubkaCiary()
Alias pre hrúbkaČiary.
-
hrúbkaPera
public void hrúbkaPera(double nováHrúbka)
Nastav konkrétnu hrúbku čiary pera.- Parametre:
nováHrúbka– hrúbka čiary pera- Výnimky:
GRobotException– ak je hrúbka čiary pera záporná- Pozri tiež:
hrúbkaPera(),hrúbkaČiary(),hrúbkaČiary(double),predvolenáHrúbkaPera(),predvolenáHrúbkaČiary(),čiara(),čiara(Stroke),hrúbkaPeraDoma,vzorČiary(double, double...),vzorPera(double, double...)
-
hrubkaPera
public void hrubkaPera(double nováHrúbka)
Alias pre hrúbkaPera.
-
hrúbkaČiary
public void hrúbkaČiary(double nováHrúbka)
Nastav konkrétnu hrúbku čiary pera.- Parametre:
nováHrúbka– hrúbka čiary pera- Výnimky:
GRobotException– ak je hrúbka čiary pera záporná- Pozri tiež:
hrúbkaPera(),hrúbkaČiary(),hrúbkaPera(double),predvolenáHrúbkaPera(),predvolenáHrúbkaČiary(),čiara(),čiara(Stroke),hrúbkaČiaryDoma,vzorČiary(double, double...),vzorPera(double, double...)
-
hrubkaCiary
public void hrubkaCiary(double nováHrúbka)
Alias pre hrúbkaČiary.
-
predvolenáHrúbkaPera
public void predvolenáHrúbkaPera()
Nastaví hrúbku čiary pera na predvolenú.
-
predvolenaHrubkaPera
public void predvolenaHrubkaPera()
Alias pre predvolenáHrúbkaPera.
-
predvolenáHrúbkaČiary
public void predvolenáHrúbkaČiary()
Nastaví hrúbku čiary pera na predvolenú.
-
predvolenaHrubkaCiary
public void predvolenaHrubkaCiary()
Alias pre predvolenáHrúbkaČiary.
-
čiara
public Stroke čiara()
Vráti objekt typu
Strokevyjadrujúci vlastnosti aktuálnej čiary, ktorou robot kreslí.Poznámka: Predvolene ide o objekt typu
BasicStroke, ktorý definuje súvislú čiaru s aktuálnou hrúbkou pera robota.Pozor! Pri každej zmene hrúbky pera je vytvorený nový objekt
BasicStroke, ktorý nahradí prípadný objekt nastavený metódoučiara(nováČiara).- Návratová hodnota:
- aktuálna čiara robota (objekt typu
Stroke) - Pozri tiež:
hrúbkaPera(),hrúbkaČiary(),hrúbkaPera(double),hrúbkaČiary(double),predvolenáHrúbkaPera(),predvolenáHrúbkaČiary(),čiara(Stroke),vzorČiary(double, double...),vzorPera(double, double...)
-
čiara
public void čiara(Stroke nováČiara)
Podľa zadaného objekt typu
Strokenastaví novú čiaru, ktorou bude robot kresliť. Ak je zadaná hodnotanull, tak je čiara resetovaná podľa naposledny nastavenej hrúbky čiary.Poznámka: Nastavenie vlastnej čiary prostredníctvom tejto metódy nie je súčasťou automatickej konfigurácie. (Pozri napríklad metódu
registrujVKonfigurácii.)Pozor! Pri každej zmene hrúbky pera je vytvorený nový objekt
BasicStroke, ktorý nahradí objekt nastavený touto metódou.Užitočné zdroje:
- Stroking and Filling Graphics Primitives (The Java™ Tutorials – 2D Graphics – Working with Geometry). Copyright © 1995, 2019 Oracle and/or its affiliates. Citované: 9. apríla 2020.
- Use dashed stroke to draw dashed line in Java. java2s.com – © Demo Source and Support. Citované: 9. apríla 2020.
- Dashed stroke : Stroke – 2D Graphics GUI – Java. java2s.com – © Demo Source and Support. Citované: 9. apríla 2020.
- Flanagan, David: Stroking Lines (Java Foundation Triedy). Copyright © 2001 O’Reilly and Associates. ISBN 1-56592-488-6. Published September 1999. Citované: 9. apríla 2020.
- Parametre:
nováČiara– objekt typuStrokevyjadrujúci vlastnosti novej čiary, ktorou bude robot kresliť alebo hodnotanull- Pozri tiež:
hrúbkaPera(),hrúbkaČiary(),hrúbkaPera(double),hrúbkaČiary(double),predvolenáHrúbkaPera(),predvolenáHrúbkaČiary(),čiara(),vzorČiary(double, double...),vzorPera(double, double...)
-
tvarPodľaČiary
public Shape tvarPodľaČiary(Shape tvar)
Vyrobí zo zadaného tvaru nový tvar podľa aktuálneho typu ťahu. Nový tvar bude tvoriť obrys oblasti, ktorú by robot vyplnil kreslením zadaného tvaru svojím aktuálnym ťahom.
Príklad:
S pomocou niekoľkých nasledujúcich príkazov sa dá vytvoriť jednoduchý tvar oválu, ktorý môže byť obkresľovaný (čiarou) alebo vypĺňaný. (Príklad používa triedu Javy
Shape.)// Výroba cesty (iba čiarka dlhá 120 bodov – ovál z nej vytvorí až// veľmi hrubá čiara, ktorá je v tomto rámci predvolene zaoblená):odskoč(60);začniCestu();skoč(120);// Nastavenie hrúbky čiary a vyrobenie tvaru z cesty:hrúbkaČiary(150);java.awt.Shapetvar =tvarPodľaČiary(cesta());// Vymazanie čiarky:Svet.vymaž();// Nastavenie tenšej čiary a nakreslenie vyrobeného oválu:hrúbkaČiary(15);kresliTvar(tvar);Výsledok:
Výsledok kreslenia príkladu.- Parametre:
tvar– tvar, z ktorého bude vytvorený nový tvar podľa aktuálneho ťahu robota- Návratová hodnota:
- nový tvar vytvorený zo zadaného tvaru podľa aktuálneho ťahu robota
-
tvarPodlaCiary
public Shape tvarPodlaCiary(Shape tvar)
Alias pre tvarPodľaČiary.
-
farba
public Farba farba()
Číta farbu robota. Farba robota
ovplyvňuje farebnosť predvoleného tvaru robota a farbu
kreslenia (čiar aj pečiatok).- Definované:
farbav rozhraníFarebnosť- Návratová hodnota:
- aktuálna farba robota (objekt typu
Farba) - Pozri tiež:
farba(Color),farba(Farebnosť),farba(int, int, int),farba(int, int, int, int),predvolenáFarba(),farbaDoma
-
farba
public void farba(Color nováFarba)
Nastav farbu robota. Nastaví
farbu a priehľadnosť robota podľa použitého objektu
Color(alebo odvodeného napr.Farba). Farba robota ovplyvňuje farebnosť predvoleného tvaru robota a farbu kreslenia (čiar aj pečiatok).- Parametre:
nováFarba– objekt farebného údajového typu určujúci novú farbu robota; jestvuje paleta predvolených farieb (pozri napríklad:biela,červená,čierna…)- Pozri tiež:
farba(),farba(Farebnosť),farba(int, int, int),farba(int, int, int, int),predvolenáFarba(),farbaDoma
-
farba
public void farba(Farebnosť podľaObjektu)
Nastaví farbu a priehľadnosť robota podľa zadaného objektu, ktorý musí byť implementáciou rozhrania
Farebnosť. (Farba robota ovplyvňuje farebnosť predvoleného tvaru robota a farbu kreslenia – čiar aj pečiatok.)- Parametre:
podľaObjektu– objekt, podľa ktorého má byť nastavená farebnosť pera tohto robota- Pozri tiež:
farba(),farba(Color),farba(int, int, int),farba(int, int, int, int),predvolenáFarba()
-
farba
public Farba farba(int r, int g, int b)
Nastav farbu robota. Nastaví farbu robota podľa zadaných farebných zložiek. (Farba robota ovplyvňuje farebnosť predvoleného tvaru robota a farbu kreslenia – čiar aj pečiatok.)
- Parametre:
r– červená zložka novej farby; celé číslo v rozsahu 0 – 255g– zelená zložka novej farby; celé číslo v rozsahu 0 – 255b– modrá zložka novej farby; celé číslo v rozsahu 0 – 255- Návratová hodnota:
- objekt typu
Farba– nová farba robota - Pozri tiež:
farba(),farba(Color),farba(Farebnosť),farba(int, int, int, int),predvolenáFarba()
-
farba
public Farba farba(int r, int g, int b, int a)
Nastav farbu robota. Nastaví farbu a (ne)priehľadnosť robota podľa zadaných farebných zložiek a úrovne priehľadnosti. (Farba robota ovplyvňuje farebnosť predvoleného tvaru robota a farbu kreslenia – čiar aj pečiatok.)
- Parametre:
r– červená zložka novej farby; celé číslo v rozsahu 0 – 255g– zelená zložka novej farby; celé číslo v rozsahu 0 – 255b– modrá zložka novej farby; celé číslo v rozsahu 0 – 255a– úroveň (ne)priehľadnosti novej farby; celé číslo v rozsahu 0 – 255 (0 – neviditeľná farba; 255 – nepriehľadná farba)- Návratová hodnota:
- objekt typu
Farba– nová farba robota - Pozri tiež:
farba(),farba(Color),farba(Farebnosť),farba(int, int, int),predvolenáFarba()
-
predvolenáFarba
public void predvolenáFarba()
Nastaví farbu robota na predvolenú farbu. (Predvolenou farbou robota je čierna. Farba robota ovplyvňuje farebnosť predvoleného tvaru robota a farbu kreslenia – čiar aj pečiatok.)
- Pozri tiež:
farba(),farba(Color),farba(Farebnosť),farba(int, int, int),farba(int, int, int, int)
-
predvolenaFarba
public void predvolenaFarba()
Alias pre predvolenáFarba.
-
cieľováFarba
public Farba cieľováFarba()
Číta cieľovú farbu robota.
Hodnota nullznamená, že tento atribút nie je nastavený (to je predvolený stav). Podrobnosti o využití tohto atribútu nájdete v opise metódycieľováFarba.- Návratová hodnota:
- aktuálna cieľová farba robota (objekt typu
Farba) - Pozri tiež:
cieľováFarba(Color),cieľováFarba(Farebnosť),cieľováFarba(int, int, int),cieľováFarba(int, int, int, int),zrušCieľovúFarbu(),cieľováFarbaDoma,použiKruhovýNáter()
-
cielovaFarba
public Farba cielovaFarba()
Alias pre cieľováFarba.
-
cieľováFarba
public void cieľováFarba(Color nováFarba)
Nastaví cieľovú farbu
(a priehľadnosť) robota podľa použitého objektu
Color(alebo odvodeného napr.Farba). Cieľová farba je použitá pri vytváraní farebných prechodov výplní alebo obrysových čiar objektov kreslených robotom a na vytvorenie farebného prechodu čiary kreslenej pri posune robota. Hodnotanullzruší nastavenie cieľovej farby tohto robota.Cieľová farba poskytuje najrýchlejší spôsob automatického definovania lineárneho farebného prechodu používaného robotom pri kreslení. Začiatok farebného prechodu je pri pečiatkovaní tvarov za robotom a pri kreslení perom v mieste aktuálnej pozície robota (pred presunom). Koniec prechodu je pri pečiatkovaní tvarov pred robotom a pri kreslení perom v mieste cieľovej pozície. Rozsah prechodu pri pečiatkovaní sa dá ovplyvniť veľkosťou robota. Pri kreslení perom je rozsah prechodu určený automaticky podľa dĺžky posunu robota. Pri pečiatkovaní je prechod použitý rovnako na vypĺňanie tvarov aj na farebný štýl čiary, ktorou sú tvary obkresľované. Na vytvorenie zložitejších prechodov je nevyhnutné použiť prislúchajúce triedy Javy spolu s vlastnosťou
náter. (Príklady sú v opise metódynáter(novýNáter).)Príklad:
super(250,250);skry();Svet.farbaPozadia(tmavošedá);farba(svetlotyrkysová);cieľováFarba(svetlooranžová);veľkosť(50);hrúbkaČiary(5);for(inti =0; i <10; ++i) {skoč();krúžok();odskoč();vpravo(36); }Výsledok:

Výsledkom tohto príkladu je obrázok podobný miniatúrnej mandale.- Parametre:
nováFarba– objekt farebného údajového typu určujúci cieľovú farbu robota; jestvuje paleta predvolených farieb (pozri napríklad:biela,červená,čierna…)- Pozri tiež:
cieľováFarba(),cieľováFarba(Farebnosť),cieľováFarba(int, int, int),cieľováFarba(int, int, int, int),zrušCieľovúFarbu(),cieľováFarbaDoma,použiKruhovýNáter()
-
cielovaFarba
public void cielovaFarba(Color nováFarba)
Alias pre cieľováFarba.
-
cieľováFarba
public void cieľováFarba(Farebnosť podľaObjektu)
Nastaví cieľovú farbu a priehľadnosť robota podľa zadaného objektu, ktorý musí byť implementáciou rozhrania
Farebnosť. (Podrobnosti o využití tohto atribútu nájdete v opise metódycieľováFarba.)- Parametre:
podľaObjektu– objekt, podľa ktorého má byť nastavená cieľová farba tohto robota- Pozri tiež:
cieľováFarba(),cieľováFarba(Color),cieľováFarba(int, int, int),cieľováFarba(int, int, int, int),zrušCieľovúFarbu(),použiKruhovýNáter()
-
cielovaFarba
public void cielovaFarba(Farebnosť podľaObjektu)
Alias pre cieľováFarba.
-
cieľováFarba
public Farba cieľováFarba(int r, int g, int b)
Nastaví cieľovú farbu robota podľa zadaných farebných zložiek. (Podrobnosti o využití tohto atribútu nájdete v opise metódy
cieľováFarba.)- Parametre:
r– červená zložka novej farby; celé číslo v rozsahu 0 – 255g– zelená zložka novej farby; celé číslo v rozsahu 0 – 255b– modrá zložka novej farby; celé číslo v rozsahu 0 – 255- Návratová hodnota:
- objekt typu
Farba– nová cieľová farba robota - Pozri tiež:
cieľováFarba(),cieľováFarba(Color),cieľováFarba(Farebnosť),cieľováFarba(int, int, int, int),zrušCieľovúFarbu(),použiKruhovýNáter()
-
cielovaFarba
public Farba cielovaFarba(int r, int g, int b)
Alias pre cieľováFarba.
-
cieľováFarba
public Farba cieľováFarba(int r, int g, int b, int a)
Nastaví cieľovú farbu robota a priehľadnosť robota podľa zadaných farebných zložiek a úrovne priehľadnosti. (Podrobnosti o využití tohto atribútu nájdete v opise metódy
cieľováFarba.)- Parametre:
r– červená zložka novej farby; celé číslo v rozsahu 0 – 255g– zelená zložka novej farby; celé číslo v rozsahu 0 – 255b– modrá zložka novej farby; celé číslo v rozsahu 0 – 255a– úroveň (ne)priehľadnosti novej farby; celé číslo v rozsahu 0 – 255 (0 – neviditeľná farba; 255 – nepriehľadná farba)- Návratová hodnota:
- objekt typu
Farba– nová cieľová farba robota - Pozri tiež:
cieľováFarba(),cieľováFarba(Color),cieľováFarba(Farebnosť),cieľováFarba(int, int, int),zrušCieľovúFarbu(),použiKruhovýNáter()
-
cielovaFarba
public Farba cielovaFarba(int r, int g, int b, int a)
Alias pre cieľováFarba.
-
zrušCieľovúFarbu
public void zrušCieľovúFarbu()
Zruší nastavenie cieľovej farby robota. (Podrobnosti o využití tohto atribútu nájdete v opise metódy
cieľováFarba.)
-
zrusCielovuFarbu
public void zrusCielovuFarbu()
Alias pre zrušCieľovúFarbu.
-
použijeKruhovýNáter
public boolean použijeKruhovýNáter()
Overí, či má robot v prípade nastavenia cieľovej farby vytvoriť kruhový náter na výplň tvarov.
Príklad:
// Prvý kruh bude vyplnený bez špeciálneho náteru – predvolenou// čiernou farbou.Svet.farbaTextu(tyrkysová);Svet.vypíšRiadok("Použije kruhový náter: ",použijeKruhovýNáter());kruh(180);// Druhý kruh bude vyplnený lineárnym náterom. Na náter má vplyv// aj veľkosť robota.veľkosť(60);farba(červená);cieľováFarba(žltá);Svet.vypíšRiadok("Použije kruhový náter: ",použijeKruhovýNáter());kruh(120);// Tretí kruh bude vyplnený kruhovým náterom.použiKruhovýNáter();Svet.vypíšRiadok("Použije kruhový náter: ",použijeKruhovýNáter());kruh(60);Výsledok:
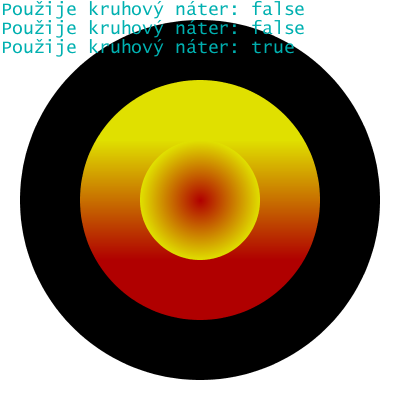
Výsledok kreslenia príkladu.- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
použiKruhovýNáter(),nepoužiKruhovýNáter(),cieľováFarba()
-
pouzijeKruhovyNater
public boolean pouzijeKruhovyNater()
Alias pre použijeKruhovýNáter.
-
použiKruhovýNáter
public void použiKruhovýNáter()
Prikáže, aby robot v prípade nastavenia cieľovej farby použil na výplň tvarov kruhový náter.
Príklad:
// Obmedzenie kreslenia:kresliDo(kružnica(50));// Nastavenia ovplyvňujúce náter:veľkosť(80);farba(biela);cieľováFarba(modrá);použiKruhovýNáter();// Použitie náteru:skoč(-25,30);kruh(100);// Zrušenie obedzenia kreslenia a nakreslenie okrajovej čiary:kresliVšade();skočNa(stred);hrúbkaČiary(2);farba(čierna);kružnica(50);Predchádzajúca sekvencia príkazov nakreslí obrázok nižšie. Vysunutie kruhového náteru je realizované s použitím triku obmedzenia kreslenia.
Výsledok:
Výsledok kreslenia.- Pozri tiež:
použijeKruhovýNáter(),nepoužiKruhovýNáter(),cieľováFarba()
-
pouziKruhovyNater
public void pouziKruhovyNater()
Alias pre použiKruhovýNáter.
-
nepoužiKruhovýNáter
public void nepoužiKruhovýNáter()
Vypne používanie kruhového náteru výplne tvarov, ktorý by bol použitý v prípade nastavenia cieľovej farby robota.
Príklad:
veľkosť(75);farba(červená);cieľováFarba(žiadna);použiKruhovýNáter();kruh();vpravo(45);farba(žltá);nepoužiKruhovýNáter();vyplňŠtvorec();Krátka sekvencia príkazov vyššie nakreslí obrázok nižšie. Štvorec prekrýva kruh, ktorý je vyplnený kruhovým náterom. Vypnutie kruhového náteru je použité na vyplnenie štvorca lineárnym náterom.
Výsledok:
Výsledok.- Pozri tiež:
použijeKruhovýNáter(),použiKruhovýNáter(),cieľováFarba()
-
nepouziKruhovyNater
public void nepouziKruhovyNater()
Alias pre nepoužiKruhovýNáter.
-
náter
public Paint náter()
Vráti objekt s aktuálnym druhom náteru, ktorý grafický robot používa na kreslenie (kreslenie čiar pera, vypĺňanie plôch a kreslenie obrysových čiar ním generovaných pečiatkových tvarov, kreslenie svojho predvoleného tvaru, prípadne iné). Ak náter nie je nastavený, tak táto metóda vráti hodnotu
null. Ďalšie podrobnosti o tejto vlastnosti nájdete v opise metódynáter(novýNáter).Poznámka: Táto vlastnosť robota sa pôvodne mala volať výplň, ale tento názov kolidoval s príkazom vyplň, preto bolo potrebné hľadať iné pomenovanie. Nakoniec sa autor priklonil k názvu náter a popri tom sa ukázalo, že s týmto pomenovaním vlastnosť lepšie zapadá do kategórie farebnosti a viditeľnosti, do ktorej principiálne patrí.
- Návratová hodnota:
- aktuálny druh náteru, to jest druh výplne
a obrysových čiar kreslených tvarov alebo
null - Pozri tiež:
náter(Paint),zrušNáter()
-
náter
public void náter(Paint novýNáter)
Upraví druh náteru, ktorý grafický robot používa na kreslenie (kreslenie čiar pera, vypĺňanie plôch a kreslenie obrysových čiar ním generovaných pečiatkových tvarov, kreslenie svojho predvoleného tvaru, prípadne iné). Ak je namiesto parametra
novýNáterzadaná hodnotanull, tak bude definícia náteru zrušená a robot bude kresliť objekty a čiary podľa svojich farebných nastavení – pozri vlastnostifarbaacieľováFarba. Použitie tejto vlastnosti lepšie ukazujú dva príklady nižšie.Poznámka: Táto vlastnosť robota sa pôvodne mala volať výplň, ale tento názov kolidoval s príkazom vyplň, preto bolo potrebné hľadať iné pomenovanie. Nakoniec sa autor priklonil k názvu náter a popri tom sa ukázalo, že s týmto pomenovaním vlastnosť lepšie zapadá do kategórie farebnosti a viditeľnosti, do ktorej principiálne patrí.
Upozornenie: Obidva nasledujúce príklady vyžadujú importovanie týchto dvoch tried Javy:
RadialGradientPaintaMultipleGradientPaint.CycleMethod. Druhý príklad navyše vyžaduje aj importovanie týchto troch tried Javy:MultipleGradientPaint.ColorSpaceType,Point2DaAffineTransform.Príklad 1:
Tento príklad ukazuje použitie triedy Javy
RadialGradientPaintna výrobu opakujúceho sa excentrického náteru s kruhovým farebným prechodom. Náter je použitý na vyplnenie kruhu generovaného robotom. Rozdielnosť súradnicových priestorov Javy a programovacieho rámca je vyriešená pomocou prislúchajúcich metód triedySvet.super(250,250);skry();// Príprava polí kotiev:float[] polohy = {0.0f,0.33f,1.0f};Farba[] farby = {svetlošedá,biela,svetlotyrkysová};// Vytvorenie náteru kruhového farebného prechodu:RadialGradientPaintnáter =newRadialGradientPaint( (float)Svet.prepočítajX(0), (float)Svet.prepočítajY(5),30,// stred a polomer(float)Svet.prepočítajX(20), (float)Svet.prepočítajY(10),// ohniskopolohy,// polohy farebných kotievfarby,// farby farebných kotievCycleMethod.REFLECT);// metóda opakovania prechodu zrkadlením// Nastavenie (aktivovanie) náteru a nakreslenie kruhu:náter(náter);kruh(100);Výsledok:
Excentrický kruhový náter vypĺňajúci kruhovú oblasť.Príklad 2:
V tomto príklade je ukázané, ako sa dá trieda Javy
RadialGradientPaintpoužiť na výrobu náteru simulujúceho tieň objektu. Príklad zároveň ukazuje spôsob umiestnenia farebného prechodu (gradientu) s ohľadom na rozdielnosť súradnicových priestorov Javy a programovacieho rámca GRobot a tiež spôsob transformácie kruhového gradientu na elipsový.super(250,250);skry();// Faktor veľkosti (polovica polomeru) gule:finaldoublerozmer =40.0;// Príprava polí kotiev:float[] polohy = {0.0f,1.0f};Farba[] farby = {čierna,žiadna};// Vytvorenie inštancie stredu tieňa s prepočítanými súradnicami:Point2D.DoublepolohaStredu =newPoint2D.Double(Svet.prepočítajX(0),Svet.prepočítajY(-(rozmer *1.75)));// Príprava transformácie tieňa:AffineTransformtransformácia =newAffineTransform(); transformácia.concatenate(newSVGPodpora.Transformácia(SVGPodpora.Transformácia.POSUN, polohaStredu.getX(), polohaStredu.getY()).daj()); transformácia.concatenate(newSVGPodpora.Transformácia(SVGPodpora.Transformácia.MIERKA_Y,0.5).daj()); transformácia.concatenate(newSVGPodpora.Transformácia(SVGPodpora.Transformácia.POSUN, -polohaStredu.getX(), -polohaStredu.getY()).daj());// Vytvorenie náteru tieňa:RadialGradientPaintnáter =newRadialGradientPaint( polohaStredu, (float)(rozmer *2), polohaStredu, polohy, farby,CycleMethod.NO_CYCLE,ColorSpaceType.LINEAR_RGB, transformácia);// Nakreslenie tieňa:odskoč(rozmer *1.75);náter(náter);vyplňElipsu(rozmer *2, rozmer);podlaha.rozmaž(12,3);Svet.farbaPozadia(svetlošedá.bledšia());náter(null);skoč(rozmer *1.75);// Nakreslenie lúčov nad guľou:skoč(rozmer);farba(žltá);vyplňHviezdu(rozmer *2);vpravo(36);vyplňHviezdu(rozmer *2);vľavo(36);odskoč(rozmer);// Nakreslenie gule:farba(svetlomodrá);kruh(rozmer *2);Výsledok:
Scéna, v ktorej plní kruhový prechod úlohu tieňa.- Parametre:
novýNáter– nový druh náteru, to jest druhu výplne a obrysových čiar kreslených tvarov- Pozri tiež:
náter(),zrušNáter()
-
zrušNáter
public void zrušNáter()
Zruší definíciu náteru grafického robota. Volanie tejto metódy je ekvivalentné volaniu metódy:
náter(null).- Pozri tiež:
náter(),náter(Paint)
-
zrusNater
public void zrusNater()
Alias pre zrušNáter.
-
polohaPera
public boolean polohaPera()
Zistí aktuálnu polohu pera.
- Návratová hodnota:
trueak je pero položené,falsev opačnom prípade- Pozri tiež:
polohaPera(boolean),peroZdvihnuté(),peroPoložené(),zdvihniPero(),položPero(),polohaPeraDoma,kreslímTvary
-
peroZdvihnuté
public boolean peroZdvihnuté()
Zistí aktuálnu polohu pera.
- Návratová hodnota:
trueak je pero zdvihnuté z plátna,falsev opačnom prípade- Pozri tiež:
polohaPera(),polohaPera(boolean),peroPoložené(),zdvihniPero(),položPero()
-
peroZdvihnute
public boolean peroZdvihnute()
Alias pre peroZdvihnuté.
-
peroPoložené
public boolean peroPoložené()
Zistí aktuálnu polohu pera.
- Návratová hodnota:
trueak je pero položené,falsev opačnom prípade- Pozri tiež:
polohaPera(),polohaPera(boolean),peroZdvihnuté(),zdvihniPero(),položPero()
-
peroPolozene
public boolean peroPolozene()
Alias pre peroPoložené.
-
polohaPera
public void polohaPera(boolean polož)
Zdvihne alebo položí pero na základe zadanej pravdivostnej hodnoty –
truepoloží pero,falsezdvihne pero.- Parametre:
polož–true/false- Pozri tiež:
polohaPera(),peroZdvihnuté(),peroPoložené(),zdvihniPero(),položPero(),polohaPeraDoma
-
zdvihniPero
public void zdvihniPero()
Zdvihne pero tohto robota z plátna podlahy alebo stropu. Robot sa bude presúvať bez kreslenia čiary. Opačný efekt má metóda
položPero.- Pozri tiež:
polohaPera(),polohaPera(boolean),peroZdvihnuté(),peroPoložené(),položPero(),dopredu,vzad,choďNa,choďPoOblúku,zdvihniPeroDoma,nekresliTvary
-
položPero
public void položPero()
Položí pero tohto robota na plátno podlahy alebo stropu. Robot bude pri presune kresliť čiaru. Opačný efekt má metóda
zdvihniPero.- Pozri tiež:
polohaPera(),polohaPera(boolean),peroZdvihnuté(),peroPoložené(),zdvihniPero(),dopredu,vzad,choďNa,choďPoOblúku,položPeroDoma,kresliTvary
-
polozPero
public void polozPero()
Alias pre položPero.
-
viditeľný
public boolean viditeľný()
Zistí, či je robot viditeľný alebo skrytý. Metóda nezistí, či skutočne robot vidno, iba vráti stav zobrazenia určený metódami
zobrazaskry. (To znamená, že ak je napríklad robot skrytý za nejakým objektom, táto metóda to nezistí.) Alternatívou tejto metódy je metódazobrazený.- Návratová hodnota:
trueak je robot viditeľný,falsev opačnom prípade- Pozri tiež:
zobrazený(),skrytý(),ukáž(),zobraz(),skry(),viditeľnýDoma
-
viditelny
public boolean viditelny()
Alias pre viditeľný.
-
zobrazený
public boolean zobrazený()
Zistí, či je robot viditeľný alebo skrytý. Metóda nezistí, či je skutočne robot vidno, iba vráti stav zobrazenia určený metódami
zobrazaskry. (To znamená, že ak je napríklad robot skrytý za nejakým objektom, táto metóda to nezistí.)- Návratová hodnota:
trueak je robot zobrazený,falsev opačnom prípade- Pozri tiež:
viditeľný(),skrytý(),ukáž(),zobraz(),skry(),zobrazenýDoma
-
zobrazeny
public boolean zobrazeny()
Alias pre zobrazený.
-
skrytý
public boolean skrytý()
Zistí, či je robot viditeľný alebo skrytý. Metóda nezistí, či skutočne robot nevidno, iba vráti stav zobrazenia určený metódami
zobrazaskry. (To znamená, že ak je napríklad robot skrytý za nejakým objektom, táto metóda to nezistí.) Alternatívou tejto metódy je metódaviditeľný.- Návratová hodnota:
trueak je robot skrytý,falsev opačnom prípade- Pozri tiež:
viditeľný(),zobrazený(),ukáž(),zobraz(),skry(),skrytýDoma
-
skryty
public boolean skryty()
Alias pre skrytý.
-
ukáž
public void ukáž()
Zobrazí tento robot. Alternatívou tejto metódy je metóda
zobraz. Opačný efekt má metódaskry. Ak robot nebol viditeľný, tak je spustená reakciazobrazenie.- Pozri tiež:
viditeľný(),zobrazený(),skrytý(),zobraz(),ukáž(boolean),zobraz(boolean),skry(),ukážDoma
-
ukaz
public void ukaz()
Alias pre ukáž.
-
zobraz
public void zobraz()
Zobrazí tento robot. Alternatívou tejto metódy je metóda
ukáž. Opačný efekt má metódaskry. Ak robot nebol viditeľný, tak je spustená reakciazobrazenie.- Pozri tiež:
viditeľný(),zobrazený(),skrytý(),ukáž(),ukáž(boolean),zobraz(boolean),skry(),zobrazDoma
-
skry
public void skry()
Skryje tento robot. Ak bol robot pred volaním tejto metódy viditeľný, tak je spustená reakcia
skrytie. Opačný efekt majú metódyukážazobraz(ktoré fungujú identicky – jedna je alternatívou druhej). Uvedené metódy majú definované aj verzie s parametrom, ktorého hodnota určuje, či má byť robot zobrazený alebo skrytý.- Pozri tiež:
viditeľný(),zobrazený(),skrytý(),ukáž(),ukáž(boolean),zobraz(),zobraz(boolean),skryDoma
-
ukáž
public void ukáž(boolean ukáž)
Zobrazí alebo skryje tento robot podľa hodnoty parametra
ukáž. Alternatívou tejto metódy je metódazobraz. Okrem tejto dvojice metód je definovaná trojica bezparametrických metód:ukáž,zobrazaskry.- Parametre:
zobraz– ak je hodnota tohto parametera rovnátruea robot nie je viditeľný, tak bude zobrazený (čo bude mať za následok automatické spustenie reakciezobrazenie); ak je hodnota tohto parametera rovnáfalsea robot je viditeľný, tak bude skrytý (čo bude mať za následok automatické spustenie reakcieskrytie)- Pozri tiež:
viditeľný(),zobrazený(),skrytý(),ukáž(),zobraz(),zobraz(boolean),skry(),ukážDoma
-
ukaz
public void ukaz(boolean ukáž)
Alias pre ukáž.
-
zobraz
public void zobraz(boolean zobraz)
Zobrazí alebo skryje tento robot podľa hodnoty parametra
zobraz. Alternatívou tejto metódy je metódaukáž. Okrem tejto dvojice metód je definovaná trojica bezparametrických metód:ukáž,zobrazaskry.- Parametre:
zobraz– ak je hodnota tohto parametera rovnátruea robot nie je viditeľný, tak bude zobrazený (čo bude mať za následok automatické spustenie reakciezobrazenie); ak je hodnota tohto parametera rovnáfalsea robot je viditeľný, tak bude skrytý (čo bude mať za následok automatické spustenie reakcieskrytie)- Pozri tiež:
viditeľný(),zobrazený(),skrytý(),ukáž(),zobraz(),ukáž(boolean),skry(),zobrazDoma
-
priehľadnosť
public double priehľadnosť()
Zistí aktuálnu úroveň
(ne)priehľadnosti tvaru tohto robota.Poznámka: Kreslenie priehľadných tvarov so sebou prináša jeden efekt, ktorý je vhodné vziať do úvahy. Pozri podrobnejšiu poznámku v opise metódy
priehľadnosť(priehľadnosť).- Definované:
priehľadnosťv rozhraníPriehľadnosť- Návratová hodnota:
- aktuálna úroveň priehľadnosti tvaru tohto robota
- Pozri tiež:
priehľadnosť(double),upravPriehľadnosť(double),priehľadnosťDoma()
-
priehladnost
public double priehladnost()
Alias pre priehľadnosť.- Definované:
priehladnostv rozhraníPriehľadnosť
-
priehľadnosť
public void priehľadnosť(double priehľadnosť)
Nastaví novú úroveň
(ne)priehľadnosti tohto robota použitú pri kreslení
(zobrazení) jeho tvaru. Ak chceme, aby bola táto vlastnosť
korektne použitá, musíme vopred upraviť jej hodnotu, to
znamená, že ešte pred samotným kreslením (tvaru) robota.
Počas kreslenia vlastného tvaru je už neskoro. Rovnako obrázky použité namiesto vlastného tvaru by nemali mať nastavenú vlastnú úroveň priehľadnosti,
ak nechceme, aby ich úroveň priehľadnosti prekryla
nastavenie priehľadnosti tohto robota (vlastnou úrovňou
priehľadnosti obrázka máme na mysli inú hodnotu, než
1.0).Úroveň 0.0 znamená, že robot by nemal byť zobrazený, avšak rámec sa ho vždy aspoň pokúsi nakresliť (spustí sa metóda kreslenia, aj keď jej výsledok bude neviditeľný). Keď chceme robot skutočne skryť, použijeme metódu
skry. Úroveň 1.0 znamená, že robot bude zobrazený bez úpravy priehľadnosti.Poznámka: Pri kreslení vlastného tvaru robota treba popri uvedenom vziať do úvahy ešte jeden kľúčový fakt – počas kreslenia vlastného tvaru pôjde o zmenu priehľadnosti kreslenia jednotlivých prvkov, z ktorých tento tvar pozostáva. To znamená, že ak je tvar robota tvorený viacerými prvkami (čiarami alebo vyplnenými tvarmi), ktoré sa prekrývajú, tak (ne)priehľadnosť prekrývajúcich sa častí sa „sčíta“ (dalo by sa povedať, že v častiach, ktoré sa prekrývajú sa bude „kumulovať nepriehľadnosť“). Ukazuje to táto animácia:

- Parametre:
priehľadnosť– nová úroveň priehľadnosti tvaru tohto robota (0.0 – 1.0)- Pozri tiež:
priehľadnosť(),upravPriehľadnosť(double),priehľadnosťDoma(Double)
-
priehladnost
public void priehladnost(double priehľadnosť)
Alias pre priehľadnosť.
-
priehľadnosť
public void priehľadnosť(Priehľadnosť objekt)
Skopíruje úroveň (ne)priehľadnosti zo zadaného objektu.
- Parametre:
objekt– objekt určujúci novú úroveň priehľadnosti- Pozri tiež:
priehľadnosť(),upravPriehľadnosť(double)
-
priehladnost
public void priehladnost(Priehľadnosť objekt)
Alias pre priehľadnosť.
-
upravPriehľadnosť
public void upravPriehľadnosť(double zmena)
Upraví úroveň (ne)priehľadnosti tohto robota. Viac informácií o priehľadnosti je v opise metódy
priehľadnosť.- Parametre:
zmena– hodnota, ktorou bude násobená aktuálna hodnota priehľadnosti; príklady: 0.5 – priehľadnosť bude znížená o polovicu, 2.0 – úroveň priehľadnosti bude zdvojnásobená- Pozri tiež:
priehľadnosť(double),priehľadnosť()
-
upravPriehladnost
public void upravPriehladnost(double zmena)
Alias pre upravPriehľadnosť.
-
písmo
public Písmo písmo()
Vráti aktuálny typ písma, ktorým
robot píše.- Návratová hodnota:
- objekt typu
Písmo– aktuálny typ písma - Pozri tiež:
písmo(Font),písmo(String, double),predvolenéPísmo(),písmoDoma()
-
písmo
public void písmo(Font novéPísmo)
Nastaví nový typ písma, ktorým bude
robot písať.- Parametre:
novéPísmo– objekt typuPísmoaleboFonturčujúci nový typ písma robota- Pozri tiež:
písmo(),písmo(Font),písmo(String, double),predvolenéPísmo(),písmoDoma(Font)
-
písmo
public Písmo písmo(String názov, double veľkosť)
Nastaví nový typ písma, ktorým bude robot písať.
- Parametre:
názov– názov písma; môže byť všeobecný názov logického písma (Dialog, DialogInput, Monospaced, Serif, SansSerif…) alebo názov konkrétneho písma (Times New Roman, Arial…)veľkosť– veľkosť písma v bodoch (hodnota je zaokrúhlená na typfloat)- Návratová hodnota:
- objekt typu
Písmourčujúci nový typ písma robota - Pozri tiež:
písmo(),písmo(Font),predvolenéPísmo()
-
predvolenéPísmo
public void predvolenéPísmo()
Vráti nastavenie typu písma robota na predvolené.
- Pozri tiež:
písmo(),písmo(Font),písmo(String, double)
-
predvolenePismo
public void predvolenePismo()
Alias pre predvolenéPísmo.
-
výškaRiadka
public int výškaRiadka()
Zistí výšku riadka textu v bodoch pri použití aktuálneho typu písma. Ak metóda z nejakého dôvodu nedokáže získať kontext grafiky, tak vráti nulu –
0.- Návratová hodnota:
- výška riadka textu v bodocj pri použití aktuálneho písma
-
vyskaRiadka
public int vyskaRiadka()
Alias pre výškaRiadka.
-
šírkaReťazca
public int šírkaReťazca(String reťazec)
Zistí šírku zadaného reťazca v bodoch pri použití aktuálneho typu písma. Ak metóda z nejakého dôvodu nedokáže získať kontext grafiky, tak vráti nulu –
0.- Parametre:
reťazec– reťazec, ktorého šírka má byť vrátená- Návratová hodnota:
- šírka zadaného reťazca v bodoch pri použití aktuálneho písma
-
sirkaRetazca
public int sirkaRetazca(String reťazec)
Alias pre šírkaReťazca.
-
šírkaMedzery
public int šírkaMedzery()
Zistí šírku medzery v bodoch pri použití aktuálneho typu písma. Ak metóda z nejakého dôvodu nedokáže získať kontext grafiky, tak vráti nulu –
0.- Návratová hodnota:
- šírka medzery v bodoch pri použití aktuálneho písma
-
sirkaMedzery
public int sirkaMedzery()
Alias pre šírkaMedzery.
-
najväčšiaŠírkaZnaku
public int najväčšiaŠírkaZnaku()
Zistí najväčšiu šírku znaku v bodoch pri použití aktuálneho typu písma. Ak metóda z nejakého dôvodu nedokáže získať kontext grafiky, tak vráti nulu –
0.- Návratová hodnota:
- najväčšia šírka znaku v bodoch pri použití aktuálneho písma
-
najvacsiaSirkaZnaku
public int najvacsiaSirkaZnaku()
Alias pre najväčšiaŠírkaZnaku.
-
polohaX
public double polohaX()
Zistí aktuálnu x-ovú súradnicu robota.
-
polohaY
public double polohaY()
Zistí aktuálnu y-ovú súradnicu robota.
-
súradnicaX
public double súradnicaX()
Alias pre polohaX.- Definované:
súradnicaXv rozhraníPoloha
-
suradnicaX
public double suradnicaX()
Alias pre súradnicaX.- Definované:
suradnicaXv rozhraníPoloha
-
súradnicaY
public double súradnicaY()
Alias pre polohaY.- Definované:
súradnicaYv rozhraníPoloha
-
suradnicaY
public double suradnicaY()
Alias pre súradnicaY.- Definované:
suradnicaYv rozhraníPoloha
-
polohaX
public void polohaX(double novéX)
Prikáže robotu, aby preskočil na
konkrétnu súradnicu na podlahe (strope) v smere osi x. Robot
nekreslí čiaru, ani nezmení smer.- Parametre:
novéX– nová x-ová súradnica
-
polohaY
public void polohaY(double novéY)
Prikáže robotu, aby preskočil na
konkrétnu súradnicu na podlahe (strope) v smere osi y. Robot
nekreslí čiaru, ani nezmení smer.- Parametre:
novéY– nová y-ová súradnica
-
súradnicaX
public void súradnicaX(double novéX)
Alias pre polohaX.
-
suradnicaX
public void suradnicaX(double novéX)
Alias pre súradnicaX.
-
súradnicaY
public void súradnicaY(double novéY)
Alias pre polohaY.
-
suradnicaY
public void suradnicaY(double novéY)
Alias pre súradnicaY.
-
poloha
public Bod poloha()
Vráti aktuálne súradnice robota
v objekte typu Bod. Vrátený objekt bude obsahovať súradnice robota, ktoré sú aktuálne v čase volania metódy. V budúcnosti tieto hodnoty súradníc nie sú aktualizované. To znamená, že vždy keď potrebujete získať aktuálne súradnice robota, tak musíte znova volať túto metódu a získať nový objekt typuBods aktuálnymi súradnicami.
-
poloha
public void poloha(Poloha poloha)
Nastaví nové súradnice robota.
Nové súradnice sú očakávané v inštancii triedy, ktorá
implementuje rozhranie Poloha, takže môže ísť o rôzne objekty programovacieho rámca GRobot. Robot sa presunie na zadané súradnice, nekreslí pri tom čiaru, ani nezmení svoju aktuálnu orientáciu (smer).- Parametre:
poloha– objekt typuPolohaobsahujúci nové súradnice robota
-
poloha
public void poloha(double novéX, double novéY)Nastaví nové súradnice robota. V podstate ide o alternatívu metódy
poloha(poloha)a funguje rovnako ako metódaskočNa(novéX, novéY).- Parametre:
novéX– nová x-ová súradnicanovéY– nová y-ová súradnica
-
jeNa
public boolean jeNa(double x, double y)Overí, či sa poloha tohto robota dokonale zhoduje so zadanými súradnicami. Ak je zistená zhoda, tak táto metóda vráti hodnotu
true, v opačnom prípade vráti hodnotufalse.
-
jeNa
public boolean jeNa(Poloha poloha)
Overí, či sa poloha tohto robota a poloha zadaného objektu dokonale zhodujú. Ak je zistená zhoda, tak táto metóda vráti hodnotu
true, v opačnom prípade je vrátená hodnotafalse.
-
uhol
public double uhol()
Zistí aktuálny uhol (smer) robota.- Definované:
uholv rozhraníSmer- Návratová hodnota:
- aktuálny uhol otočenia robota
- Pozri tiež:
uhol(double),vpravo,vľavo,uholDoma(),smer(),smerNa(double, double),uholNa(double, double),smerNa(Poloha),uholNa(Poloha),smerNa(Shape),uholNa(Shape),smerNaMyš(),uholNaMyš(),smer(double, double),uhol(double, double),otočNa(double, double)
-
smer
public double smer()
Zistí aktuálny uhol (smer) robota.- Definované:
smerv rozhraníSmer- Návratová hodnota:
- aktuálny uhol otočenia robota
- Pozri tiež:
smer(double),vpravo,vľavo,uhol(),smerDoma(),smerNa(double, double),uholNa(double, double),smerNa(Poloha),uholNa(Poloha),smerNa(Shape),uholNa(Shape),smerNaMyš(),uholNaMyš(),smer(double, double),uhol(double, double),otočNa(double, double)
-
uhol
public void uhol(double uhol)
Nasmeruje robot podľa zadaného uhla.- Parametre:
uhol– uhol smeru robota (nula znamená vpravo, deväťdesiat hore a tak ďalej)- Pozri tiež:
smer(double),vpravo,vľavo,otočNa(double, double)
-
smer
public void smer(double uhol)
Nasmeruje robot podľa zadaného uhla.- Parametre:
uhol– uhol smeru robota (nula znamená vpravo, deväťdesiat hore a tak ďalej)- Pozri tiež:
uhol(double),vpravo,vľavo,otočNa(double, double)
-
otoč
public void otoč(double uhol)
Nasmeruje (otočí) robot rovnakým smerom, ako určuje zadaný uhol. Má v podstate rovnaký efekt ako
uholalebo smer. Jej implementácia je v súlade s dodržaním názvoslovia metód programovacieho rámca a jej použitie by mohlo byť napríklad nasledujúce:otoč(inýRobot.smer());Táto metóda nemá verziu obmedzujúcu maximálny uhol pootočenia (ako napríklad:
otoč(Smer objekt, double najviacO)), pretože by pri definícii nastal konflikt s metódouotoč(Δx, Δy). Ak chcete obmedziť maximálny uhol pootočenia, použite metóduotoč(Smer objekt, double najviacO), ktorú odporúčame použiť v každom prípade.- Parametre:
uhol– uhol smeru robota (nula znamená vpravo, deväťdesiat hore a tak ďalej)- Pozri tiež:
smer(double),uhol(double),vpravo,vľavo,otočNa(double, double),otoč(double, double),otoč(double, double, double),otočO(double)
-
otoc
public void otoc(double uhol)
Alias pre otoč.
-
uhol
public void uhol(Smer objekt)
Nasmeruje robot podľa zadaného
objektu.- Parametre:
objekt– objekt určujúci uhol smeru robota (nula znamená vpravo, deväťdesiat hore a tak ďalej)
-
smer
public void smer(Smer objekt)
Nasmeruje robot podľa zadaného
objektu.- Parametre:
objekt– objekt určujúci uhol smeru robota (nula znamená vpravo, deväťdesiat hore a tak ďalej)
-
uholOtáčania
public double uholOtáčania()
Zistí aktuálnu hodnotu otáčania
robota pri použití bezparametrických verzií metód
vpravo,vľavoa iných.- Návratová hodnota:
- aktuálny uhol pootočenia robota pri použití metód
vpravo(),vľavo()a iných - Pozri tiež:
uholOtáčania(double),vpravo(),vľavo(),choďNaPoOblúku(double, double),skočNaPoOblúku(double, double)
-
uholOtacania
public double uholOtacania()
Alias pre uholOtáčania.
-
uholOtáčania
public void uholOtáčania(double uhol)
- Parametre:
uhol– nový uhol pootočenia robota pre metódyvpravo(),vľavo()iných- Pozri tiež:
uholOtáčania(),vpravo(),vľavo(),choďNaPoOblúku(double, double),skočNaPoOblúku(double, double)
-
uholOtacania
public void uholOtacania(double uhol)
Alias pre uholOtáčania.
-
pootočenieTvaru
public double pootočenieTvaru()
Vráti aktuálnu hodnotu pootočenia
tvaru robota. Ďalšie informácie o pootočení tvaru sú
v opise metódy pootočenieTvaru(pootočenie).- Návratová hodnota:
- hodnota pootočenia tvaru robota
- Pozri tiež:
pootočenieTvaru(double),otáčanieTvaru(),otáčajTvar(double),pootočenieTvaruDoma(),pootočenieTvaruDoma(Double)
-
pootocenieTvaru
public double pootocenieTvaru()
Alias pre pootočenieTvaru.
-
pootočenieTvaru
public void pootočenieTvaru(double pootočenie)
Nastaví pootočenie tvaru robota podľa
zadanej hodnoty. Pootočenie tvaru je uhol, o ktorý je
pootočené kreslenie tvaru robota voči jeho skutočnému smeru
(smeru, v ktorom sa pohybuje). Pri
kreslení
vlastného tvaru robota je hodnota aktuálneho uhla
pozmenená o túto hodnotu.- Parametre:
pootočenie– nová hodnota pootočenia tvaru robota- Pozri tiež:
pootočenieTvaru(),otáčanieTvaru(),otáčajTvar(double),pootočenieTvaruDoma(),pootočenieTvaruDoma(Double)
-
pootocenieTvaru
public void pootocenieTvaru(double pootočenie)
Alias pre pootočenieTvaru.
-
otáčanieTvaru
public double otáčanieTvaru()
Zistí aktuálnu hodnotu rovnomerného otáčania tvaru robota.
- Návratová hodnota:
- hodnota rovnomerného otáčania tvaru robota
- Pozri tiež:
pootočenieTvaru(),pootočenieTvaru(double),otáčajTvar(double),pootočenieTvaruDoma(),pootočenieTvaruDoma(Double)
-
otacanieTvaru
public double otacanieTvaru()
Alias pre otáčanieTvaru.
-
otáčajTvar
public void otáčajTvar(double otáčanie)
Nastaví novú hodnotu rovnomerného
otáčania tvaru robota a aktivuje robot ak je to potrebné.- Parametre:
otáčanie– nová hodnota rovnomerného otáčania tvaru robota- Pozri tiež:
pootočenieTvaru(),pootočenieTvaru(double),otáčanieTvaru()
-
otacajTvar
public void otacajTvar(double otáčanie)
Alias pre otáčajTvar.
-
otáčajTvar
public void otáčajTvar(double otáčanie, boolean aktivuj) Nastaví novú hodnotu rovnomerného
otáčania tvaru robota.- Parametre:
otáčanie– nová hodnota rovnomerného otáčania tvaru robotaaktivuj– určí, či sa má robot zároveň aktivovať- Pozri tiež:
pootočenieTvaru(),pootočenieTvaru(double),otáčanieTvaru()
-
otacajTvar
public void otacajTvar(double otáčanie, boolean aktivuj) Alias pre otáčajTvar.
-
gyroskop
public Double gyroskop()
Zistí aktuálny stav gyroskopického vyvažovania. Ak je vyvažovanie vypnuté, tak metóda vráti hodnotu
null.- Návratová hodnota:
- aktuálna hodnota gyroskopického vyvažovania, alebo
nullak je vyvažovanie vypnuté - Pozri tiež:
gyroskop(Double),vypniGyroskop()
-
gyroskop
public void gyroskop(Double hodnota)
Nastaví novú hodnotu gyroskopického vyvažovania. Táto aktivita spôsobí automatické prepočítavanie pootočenia tvaru tak, aby výsledný uhol na zobrazenie zodpovedal hodnote gyroskopu. Ak je súčasne zapnuté automatické otáčanie tvaru aj gyroskopické vyvažovanie, tak bude vykonávané automatické prepočítavanie gyroskopického vyvažovania podľa hodnoty otáčania tvaru.
- Parametre:
hodnota– nová hodnota gyroskopického vyvažovania, alebonullak má byť vyvažovanie vypnuté- Pozri tiež:
gyroskop(),vypniGyroskop()
-
vypniGyroskop
public void vypniGyroskop()
Vypne gyroskopické vyvažovanie kreslenia tvaru.
- Pozri tiež:
gyroskop(),gyroskop(Double)
-
náhodnáPoloha
public void náhodnáPoloha()
Umiestni robot na náhodnú pozíciu na aktívnom plátne alebo obrázku. To znamená, že náhodné súradnice sú vygenerované podľa toho, či robot kreslí na podlahu, strop alebo obrázok s inými rozmermi. Na výslednú polohu má vplyv aj definícia ohraničenia.
-
nahodnaPoloha
public void nahodnaPoloha()
Alias pre náhodnáPoloha.
-
náhodnáPozícia
public void náhodnáPozícia()
Alias pre náhodnáPoloha.
-
nahodnaPozicia
public void nahodnaPozicia()
Alias pre náhodnáPoloha.
-
náhodnýSmer
public void náhodnýSmer()
Otočí robot náhodným smerom.
-
nahodnySmer
public void nahodnySmer()
Alias pre náhodnýSmer.
-
náhodnýUhol
public void náhodnýUhol()
Alias pre náhodnýSmer.
-
nahodnyUhol
public void nahodnyUhol()
Alias pre náhodnýSmer.
-
náhodnáFarba
public void náhodnáFarba()
Zmení farbu robota na náhodnú. Farby sú vybrané z preddefinovanej množiny farieb.
-
nahodnaFarba
public void nahodnaFarba()
Alias pre náhodnáFarba.
-
náhodnáVeľkosť
public void náhodnáVeľkosť(double miera)
Zmení veľkosť robota na náhodnú hodnotu v rozmedzí veľkosti, ktorú by mal pri hodnote mierky
1.0a násobkom tejto hodnoty o zadanú mieru.- Parametre:
miera– miera zmeny veľkosti v porovnaní s takou hodnotou veľkosti, ktorú by mal robot pri hodnote mierky1.0
-
nahodnaVelkost
public void nahodnaVelkost(double miera)
Alias pre náhodnáVeľkosť.
-
náhodnýPomer
public void náhodnýPomer(double miera)
Zmení pomer veľkosti robota na náhodnú hodnotu v rozmedzí pomeru veľkosti, ktorú by mal pri hodnote mierky pomeru
1.0a násobkom tejto hodnoty o zadanú mieru.Pomer je s pravdepodobnosťou 50 % prevrátený, čiže napríklad namiesto hodnoty pomeru
2.0bude nastavená hodnota1.0/2.0=0.5.- Parametre:
miera– miera zmeny pomeru veľkosti v porovnaní s takou hodnotou pomeru veľkosti, ktorú by mal robot pri hodnote mierky pomeru1.0
-
nahodnyPomer
public void nahodnyPomer(double miera)
Alias pre náhodnýPomer.
-
náhodnýRozmer
public void náhodnýRozmer(double miera)
Zmení rozmer robota na náhodnú hodnotu v rozmedzí veľkosti a pomeru veľkosti, ktoré by mal pri hodnotách mierok veľkosti a pomeru veľkosti
1.0a násobkov týchto hodnôt o zadanú mieru.Pomer je s pravdepodobnosťou 50 % prevrátený, čiže napríklad namiesto hodnoty pomeru
2.0bude nastavená hodnota1.0/2.0=0.5.- Parametre:
miera– miera zmeny rozmeru veľkosti v porovnaní s takou hodnotou rozmeru veľkosti, ktorú by mal robot pri hodnote mierky rozmeru1.0
-
nahodnyRozmer
public void nahodnyRozmer(double miera)
Alias pre náhodnýRozmer.
-
náhodnýRozmer
public void náhodnýRozmer(double mieraVeľkosti, double mieraPomeru)Zmení rozmer robota na náhodnú hodnotu v rozmedzí veľkosti a pomeru veľkosti, ktoré by mal pri hodnotách mierok veľkosti a pomeru veľkosti
1.0a násobkov týchto hodnôt o zadané miery prislúchajúcich údajov.Pomer je s pravdepodobnosťou 50 % prevrátený, čiže napríklad namiesto hodnoty pomeru
2.0bude nastavená hodnota1.0/2.0=0.5.- Parametre:
mieraVeľkosti– miera zmeny veľkosti v porovnaní s takou hodnotou veľkosti, ktorú by mal robot pri hodnote mierky1.0mieraPomeru– miera zmeny pomeru veľkosti v porovnaní s takou hodnotou pomeru veľkosti, ktorú by mal robot pri hodnote mierky pomeru1.0
-
nahodnyRozmer
public void nahodnyRozmer(double mieraVeľkosti, double mieraPomeru) Alias pre náhodnýRozmer.
-
poslednáPolohaX
public double poslednáPolohaX()
Zistí poslednú x-ovú súradnicu robota. Táto hodnota sa automaticky zálohuje pri každej zmene a nedá sa nastaviť ručne.
- Návratová hodnota:
- posledná x-ová súradnica robota
- Pozri tiež:
polohaX(),poslednáPolohaY(),poslednáPoloha()
-
poslednaPolohaX
public double poslednaPolohaX()
Alias pre poslednáPolohaX.
-
poslednáPolohaY
public double poslednáPolohaY()
Zistí poslednú y-ovú súradnicu robota. Táto hodnota sa automaticky zálohuje pri každej zmene a nedá sa nastaviť ručne.
- Návratová hodnota:
- posledná y-ová súradnica robota
- Pozri tiež:
polohaY(),poslednáPolohaX(),poslednáPoloha()
-
poslednaPolohaY
public double poslednaPolohaY()
Alias pre poslednáPolohaY.
-
poslednáSúradnicaX
public double poslednáSúradnicaX()
Alias pre poslednáPolohaX.
-
poslednaSuradnicaX
public double poslednaSuradnicaX()
Alias pre poslednáSúradnicaX.
-
poslednáSúradnicaY
public double poslednáSúradnicaY()
Alias pre poslednáPolohaY.
-
poslednaSuradnicaY
public double poslednaSuradnicaY()
Alias pre poslednáSúradnicaY.
-
poslednáPoloha
public Bod poslednáPoloha()
Vráti posledné súradnice robota v objekte typu
Bod. Vrátený objekt bude obsahovať posledné (zálohované) súradnice robota. Poloha tohto bodu nie je ďalej aktualizovaná podľa novších záloh polohy robota. To znamená, že vždy keď potrebujete získať posledné súradnice robota, tak musíte znova volať túto metódu a získať nový objekt typuBods poslednými súradnicami.- Návratová hodnota:
- objekt typu
Bodobsahujúci posledné súradnice robota - Pozri tiež:
poloha(),poslednáPolohaX(),poslednáPolohaY(),poslednáPoloha()
-
poslednaPoloha
public Bod poslednaPoloha()
Alias pre poslednáPoloha.
-
poslednýUhol
public double poslednýUhol()
Zistí posledný uhol (smer) robota.
- Návratová hodnota:
- posledný uhol otočenia robota
- Pozri tiež:
uhol(),poslednýSmer()
-
poslednyUhol
public double poslednyUhol()
Alias pre poslednýUhol.
-
poslednýSmer
public double poslednýSmer()
Zistí posledný uhol (smer) robota.
- Návratová hodnota:
- posledný uhol otočenia robota
- Pozri tiež:
uhol(),poslednýUhol()
-
poslednySmer
public double poslednySmer()
Alias pre poslednýSmer.
-
domov
public void domov()
Presunie robot „domov“ – na štartovaciu pozíciu a obráti ho predvoleným smerom. Akcia presunu robota domov môže ovplyvňovať aj iné vlastnosti robota. Napríklad metódy
zdvihniPeroDoma,položPeroDoma,zobrazDomaaskryDomaurčujú, že pri presune domov sa má zdvihnúť/položiť pero alebo skryť/zobraziť robot. Ďalej sú do úvahy brané aj ďalšie nastaviteľné informácie: domovská farba, veľkosť, pomer a hrúbka čiary.Použitie tejto metódy a všetkých jej „klonov“ má za následok vymazanie pôsobiska – pozri opisy metód
vymažPôsobiskoakresliPôsobisko.Upozornenie: Všetky „klony“ metód, ktoré slúžia na návrat na domovskú pozíciu robota ignorujú v metódach kreslenia vlastného tvaru robota (
kresliakresliTvaralebokresliSeba) skutočnú domovskú polohu a smer robota a pracujú výhradne s údajmi jeho polohy a smeru, ktoré boli platné pred začatím kreslenia vlastného tvaru. To zároveň znamená, že žiadne ďalšie vlastnosti nie sú počas kreslenia vlastného tvaru pri návrate na domovskú pozíciu ovplyvňované, ani pôsobisko nie je v tejto situácii vymazané. Preto je možné metódy návratu na domovskú pozíciu robota využívať v rámci metód kreslenia vlastných tvarov robota na rýchly návrat a otočenie grafického robota na aktuálnu pozíciu a smer (v zmysle pozície a smeru platných pred začatím kreslenia vlastného tvaru).Poznámka: Predvolene ovplyvňuje príkaz
domovtri vlastnosti: polohu, smer, a pootočenieTvaru.
-
domov
public void domov(double novýUholDoma)
Presne ako
domov, len s tým rozdielom, že robotu nastaví nový štartovací smer.Poznámka: Počas kreslenia vlastného tvaru je nový štartovací smer platný len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)- Parametre:
novýUholDoma– nový domovský smer robota
-
domov
public void domov(Smer novýSmerDoma)
Presne ako
domov, len s tým rozdielom, že robotu nastaví nový štartovací smer.Poznámka: Počas kreslenia vlastného tvaru je nový štartovací smer platný len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)- Parametre:
novýSmerDoma– objekt určujúci nový domovský smer robota
-
domov
public void domov(double novéXDoma, double novéYDoma)Presne ako
domov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu.Poznámka: Počas kreslenia vlastného tvaru je nová štartovacia pozícia platná len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)- Parametre:
novéXDoma– nová x-ová súradnica domovskej pozícienovéYDoma– nová y-ová súradnica domovskej pozície
-
domov
public void domov(double novéXDoma, double novéYDoma, double novýUholDoma)Presne ako
domov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu a smer.Poznámka: Počas kreslenia vlastného tvaru sú nový štartovací smer a pozícia platné len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)- Parametre:
novéXDoma– nová x-ová súradnica domovskej pozícienovéYDoma– nová y-ová súradnica domovskej pozícienovýUholDoma– nový domovský smer robota
-
domov
public void domov(double novéXDoma, double novéYDoma, Smer novýSmerDoma)Presne ako
domov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu a smer.Poznámka: Počas kreslenia vlastného tvaru sú nový štartovací smer a pozícia platné len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)- Parametre:
novéXDoma– nová x-ová súradnica domovskej pozícienovéYDoma– nová y-ová súradnica domovskej pozícienovýSmerDoma– objekt určujúci nový domovský smer robota
-
domov
public void domov(Poloha nováPolohaDoma)
Presne ako
domov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu.Poznámka: Počas kreslenia vlastného tvaru je nová štartovacia pozícia platná len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)- Parametre:
nováPolohaDoma– bod určujúci nové súradnice domovskej pozície v súradnicovom priestore rámca
-
domov
public void domov(Poloha nováPolohaDoma, double novýUholDoma)
Presne ako
domov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu a smer.Poznámka: Počas kreslenia vlastného tvaru sú nový štartovací smer a pozícia platné len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)- Parametre:
nováPolohaDoma– objekt určujúci nové súradnice domovskej pozície v súradnicovom priestore rámcanovýUholDoma– nový domovský smer robota
-
domov
public void domov(Poloha nováPolohaDoma, Smer novýSmerDoma)
Presne ako
domov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu a smer.Poznámka: Počas kreslenia vlastného tvaru sú nový štartovací smer a pozícia platné len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)- Parametre:
nováPolohaDoma– objekt určujúci nové súradnice domovskej pozície v súradnicovom priestore rámcanovýSmerDoma– objekt určujúci nový smer domovskej pozície robota
-
domov
public void domov(Častica častica)
Presne ako
domov, len s tým rozdielom, že robotu nastaví novú štartovaciu pozíciu, smer a rozmer (resp. domovskú veľkosť a domovský pomer veľkosti robota).Poznámka: Počas kreslenia vlastného tvaru sú nový štartovací smer a pozícia platné len do skončenia kreslenia vlastného tvaru. (Pozri aj informácie pri metóde
domov().)Poznámka: V súvislosti s vlastnosťou rozmeru venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška). To znamená, že volanie tejto metódy zmení nastavenia veľkosti doma a pomeru veľkosti doma.- Parametre:
častica– častica určujúca nové súradnice domovskej pozície (v súradnicovom priestore rámca) a nový smer robota
-
domov
public void domov(GRobot iný)
Prevezme všetky parametre domovskej pozície od zadaného robota a zároveň ich aplikuje. Dotýka sa to domovskej pozície, smeru, veľkosti, viditeľnosti a farby robota a hrúbky a polohy pera pri prechode na domovskú pozíciu.
Poznámka: Počas kreslenia vlastného tvaru platí, že:
- od iného robota nie sú prevzaté žiadne údaje o jeho veľkosti, viditeľnosti a farbe, ani o veľkosti a polohe pera;
- nový štartovací smer a pozícia sú platné len do skončenia kreslenia vlastného tvaru.
Pozri aj informácie pri metóde
domov().- Parametre:
iný– iný robot
-
novýDomov
public void novýDomov()
Zapamätá si aktuálnu pozíciu a smer ako nový domov.
-
novyDomov
public void novyDomov()
Alias pre novýDomov.
-
novýDomov
public void novýDomov(double novýUholDoma)
Nastaví robotu nový domovský smer.
- Parametre:
novýUholDoma– nový domovský smer robota
-
novyDomov
public void novyDomov(double novýUholDoma)
Alias pre novýDomov.
-
novýDomov
public void novýDomov(Smer novýSmerDoma)
Nastaví robotu nový domovský smer.
- Parametre:
novýSmerDoma– nový domovský smer robota
-
novýDomov
public void novýDomov(double novéXDoma, double novéYDoma)Nastaví robotu novú domovskú pozíciu.
- Parametre:
novéXDoma– nová x-ová súradnica domovskej pozícienovéYDoma– nová y-ová súradnica domovskej pozície
-
novyDomov
public void novyDomov(double novéXDoma, double novéYDoma) Alias pre novýDomov.
-
novýDomov
public void novýDomov(double novéXDoma, double novéYDoma, double novýUholDoma)Nastaví robotu novú domovskú pozíciu a smer.
- Parametre:
novéXDoma– nová x-ová súradnica domovskej pozícienovéYDoma– nová y-ová súradnica domovskej pozícienovýUholDoma– nový domovský smer robota
-
novyDomov
public void novyDomov(double novéXDoma, double novéYDoma, double novýUholDoma) Alias pre novýDomov.
-
novýDomov
public void novýDomov(double novéXDoma, double novéYDoma, Smer novýSmerDoma)Nastaví robotu novú domovskú pozíciu a smer.
- Parametre:
novéXDoma– nová x-ová súradnica domovskej pozícienovéYDoma– nová y-ová súradnica domovskej pozícienovýSmerDoma– nový domovský smer robota
-
novyDomov
public void novyDomov(double novéXDoma, double novéYDoma, Smer novýSmerDoma) Alias pre novýDomov.
-
novýDomov
public void novýDomov(Poloha nováPolohaDoma)
Nastaví robotu novú domovskú pozíciu.
- Parametre:
nováPolohaDoma– nová domovská pozícia (v súradnicovom priestore rámca)
-
novýDomov
public void novýDomov(Poloha nováPolohaDoma, double novýUholDoma)
Nastaví robotu novú domovskú pozíciu a smer.
- Parametre:
nováPolohaDoma– nová domovská pozícia (v súradnicovom priestore rámca)novýUholDoma– nový domovský smer robota
-
novýDomov
public void novýDomov(Poloha nováPolohaDoma, Smer novýSmerDoma)
Nastaví robotu novú domovskú pozíciu a smer.
- Parametre:
nováPolohaDoma– nová domovská pozícia (v súradnicovom priestore rámca)novýSmerDoma– nový domovský smer robota
-
novýDomov
public void novýDomov(Častica častica)
Nastaví domovskú polohu a smer robota podľa polohy a smeru zadanej častice.
- Parametre:
častica– častica, ktorej poloha a smer určia domovskú polohu a smer pre tento robot
-
novýDomov
public void novýDomov(GRobot iný)
Prevezme všetky parametre domovskej pozície od zadaného robota. Dotýka sa to všetkých aspektov domovskej pozície: polohy, smeru, pootočenia tvaru, priehľadnosti, viditeľnosti, farby, cieľovej farby, veľkosti pera (hrúbky čiary), polohy pera, písma a veľkosti robota pri prechode na domovskú pozíciu. Pri väčšine týchto vlastností sa dá určiť, či majú alebo nemajú byť pri prechode na domovskú pozíciu ovplyvňované. Aj všetky tieto nastavenia sa touto metódou kopírujú zo zadaného (iného) robota do tohto robota.
- Parametre:
iný– iný robot
-
domaX
public double domaX()
Zistí aktuálnu x-ovú súradnicu
domovskej pozície robota.Poznámka: Predvolene ovplyvňuje príkaz
domovtri vlastnosti: polohu, smer, a pootočenieTvaru.- Návratová hodnota:
- domovská x-ová súradnica robota
-
domaY
public double domaY()
Zistí aktuálnu y-ovú súradnicu
domovskej pozície robota.Poznámka: Predvolene ovplyvňuje príkaz
domovtri vlastnosti: polohu, smer, a pootočenieTvaru.- Návratová hodnota:
- domovská y-ová súradnica robota
-
uholDoma
public double uholDoma()
Zistí aktuálny smer (uhol)
domovskej pozície robota.Poznámka: Predvolene ovplyvňuje príkaz
domovtri vlastnosti: polohu, smer, a pootočenieTvaru.- Návratová hodnota:
- domovský smer (uhol) robota
- Pozri tiež:
uhol(),smerDoma(),uholDoma(double),smerDoma(double)
-
smerDoma
public double smerDoma()
Zistí aktuálny smer (uhol)
domovskej pozície robota.Poznámka: Predvolene ovplyvňuje príkaz
domovtri vlastnosti: polohu, smer, a pootočenieTvaru.- Návratová hodnota:
- domovský smer (uhol) robota
- Pozri tiež:
smer(),uholDoma(),uholDoma(double),smerDoma(double)
-
domaX
public void domaX(double x)
Nastaví aktuálnu x-ovú súradnicu
domovskej pozície robota.- Parametre:
x– nová domovská x-ová súradnica robota
-
domaY
public void domaY(double y)
Nastaví aktuálnu y-ovú súradnicu
domovskej pozície robota.- Parametre:
y– nová domovská y-ová súradnica robota
-
uholDoma
public void uholDoma(double uhol)
Nastaví aktuálny smer (uhol)
domovskej pozície robota.- Parametre:
uhol– nový domovský smer (uhol) robota- Pozri tiež:
uholDoma(),smerDoma(),smerDoma(double)
-
smerDoma
public void smerDoma(double uhol)
Nastaví aktuálny smer (uhol)
domovskej pozície robota.- Parametre:
uhol– nový domovský smer (uhol) robota- Pozri tiež:
uholDoma(),smerDoma(),uholDoma(double)
-
pootočenieTvaruDoma
public Double pootočenieTvaruDoma()
Zistí, či sa mení pootočenie tvaru pri prechode na domovskú pozíciu robota. Ak je stav pootočenia tvaru po prechode robota na domovskú pozíciu zmenený, metóda vráti objekt
Doubles hodnotou, na ktorú bude pootočenie tvaru po prechode na domovskú pozíciu nastavené. Ak sa po prechode stav pootočenia tvaru nemení, tak metóda vráti hodnotunull.Poznámka: Predvolene ovplyvňuje príkaz
domovtri vlastnosti: polohu, smer, a pootočenieTvaru.- Návratová hodnota:
- objekt
Doublealebonull - Pozri tiež:
pootočenieTvaruDoma(Double),zachovajPootočenieTvaruDoma(),pootočenieTvaru(),pootočenieTvaru(double)
-
pootocenieTvaruDoma
public Double pootocenieTvaruDoma()
Alias pre pootočenieTvaruDoma.
-
pootočenieTvaruDoma
public void pootočenieTvaruDoma(Double pootočenie)
Nastaví správanie zmeny pootočenia tvaru robota po prechode na domovskú pozíciu na základe zadaného objektu typu
Double. Ak je zadaný objekt s konkrétnou číselnou hodnotou, tak bude pootočenie tvaru robota po prechode domov upravené na túto hodnotu. Ak je zadanénull, tak sa stav pootočenia tvaru robota po prechode domov nezmení.- Parametre:
položené– objektBooleanalebonull- Pozri tiež:
pootočenieTvaruDoma(),zachovajPootočenieTvaruDoma(),pootočenieTvaru(),pootočenieTvaru(double)
-
pootocenieTvaruDoma
public void pootocenieTvaruDoma(Double pootočenie)
Alias pre pootočenieTvaruDoma.
-
zachovajPootočenieTvaruDoma
public void zachovajPootočenieTvaruDoma()
Po použití tejto metódy nebude stav pootočenia tvaru robota pri použití niektorej modifikácie metódy
domovovplyvňovaný.
-
zachovajPootocenieTvaruDoma
public void zachovajPootocenieTvaruDoma()
Alias pre zachovajPootočenieTvaruDoma.
-
polohaPeraDoma
public Boolean polohaPeraDoma()
Zistí, či sa mení stav pera pri prechode na domovskú pozíciu robota. Ak je pero po prechode robota na domovskú pozíciu položené, tak metóda vráti objekt
Booleans hodnotoutrue, ak zdvihnuté, tak s hodnotoufalse, ak sa po prechode stav pera nemení, tak metóda vráti hodnotunull.- Návratová hodnota:
- objekt
Booleanalebonull - Pozri tiež:
polohaPeraDoma(Boolean),peroZdvihnutéDoma(),peroPoloženéDoma(),zdvihniPeroDoma(),položPeroDoma(),zachovajPeroDoma(),polohaPera
-
peroZdvihnutéDoma
public Boolean peroZdvihnutéDoma()
Overí, či robot pri prechode na domovskú pozíciu zdvihne pero z plátna. Ak je pero po prechode robota na domovskú pozíciu zdvihnuté, metóda vráti objekt
Booleans hodnotoutrue, ak je položené, tak s hodnotoufalse, ak sa po prechode domov stav pera nemení metóda vrátinull.- Návratová hodnota:
- objekt
Booleanalebonull - Pozri tiež:
polohaPeraDoma(),polohaPeraDoma(Boolean),peroPoloženéDoma(),zdvihniPeroDoma(),položPeroDoma(),zachovajPeroDoma()
-
peroZdvihnuteDoma
public Boolean peroZdvihnuteDoma()
Alias pre peroZdvihnutéDoma.
-
peroPoloženéDoma
public Boolean peroPoloženéDoma()
Overí, či robot pri prechode na domovskú pozíciu položí pero na plátno. Ak je pero po prechode robota na domovskú pozíciu položené, tak metóda vráti objekt
Booleans hodnotoutrue, ak je zdvihnuté, tak s hodnotoufalse, ak sa po prechode stav pera nemení, tak metóda vráti hodnotunull.- Návratová hodnota:
- objekt
Booleanalebonull - Pozri tiež:
polohaPeraDoma(),polohaPeraDoma(Boolean),peroZdvihnutéDoma(),zdvihniPeroDoma(),položPeroDoma(),zachovajPeroDoma()
-
peroPolozeneDoma
public Boolean peroPolozeneDoma()
Alias pre peroPoloženéDoma.
-
polohaPeraDoma
public void polohaPeraDoma(Boolean položené)
Nastaví správanie zmeny polohy pera po prechode domov na základe zadaného objektu typu
Boolean. Pri zadaní objektu s hodnotoutrue, bude pero položené, pri objekte s hodnotoufalsebude pero zdvihnuté a pri zadanínull, sa po prechode domov stav pera nezmení.- Parametre:
položené– objektBooleanalebonull- Pozri tiež:
polohaPeraDoma(),peroZdvihnutéDoma(),peroPoloženéDoma(),zdvihniPeroDoma(),položPeroDoma(),zachovajPeroDoma(),polohaPera
-
zdvihniPeroDoma
public void zdvihniPeroDoma()
Spôsobí, že odteraz vždy pri použití niektorej modifikácie metódy
domovzdvihne robot pero z plátna.
-
položPeroDoma
public void položPeroDoma()
Spôsobí, že odteraz vždy pri použití niektorej modifikácie metódy
domovpoloží robot pero na plátno.
-
polozPeroDoma
public void polozPeroDoma()
Alias pre položPeroDoma.
-
zachovajPeroDoma
public void zachovajPeroDoma()
Po použití tejto metódy nebude stav polohy pera pri použití niektorej modifikácie metódy
domovovplyvňovaný.
-
viditeľnýDoma
public Boolean viditeľnýDoma()
Zistí, či sa mení viditeľnosť robota pri prechode na domovskú pozíciu. Ak je robot po prechode na domovskú pozíciu zobrazený, metóda vráti objekt
Booleans hodnotoutrue, ak skrytý, tak s hodnotoufalsea ak sa po prechode domov viditeľnosť nemení, metóda vrátinull.- Návratová hodnota:
- objekt
Booleanalebonull - Pozri tiež:
zobrazenýDoma(),skrytýDoma(),ukážDoma(),zobrazDoma(),skryDoma(),zachovajViditeľnosťDoma(),viditeľný
-
viditelnyDoma
public Boolean viditelnyDoma()
Alias pre viditeľnýDoma.
-
zobrazenýDoma
public Boolean zobrazenýDoma()
Zistí, či sa mení viditeľnosť robota pri prechode na domovskú pozíciu. Ak je robot po prechode na domovskú pozíciu zobrazený, metóda vráti objekt
Booleans hodnotoutrue, ak skrytý, tak s hodnotoufalsea ak sa po prechode domov viditeľnosť nemení, metóda vrátinull.- Návratová hodnota:
- objekt
Booleanalebonull - Pozri tiež:
viditeľnýDoma(),skrytýDoma(),ukážDoma(),zobrazDoma(),skryDoma(),zachovajViditeľnosťDoma(),zobrazený
-
zobrazenyDoma
public Boolean zobrazenyDoma()
Alias pre zobrazenýDoma.
-
skrytýDoma
public Boolean skrytýDoma()
Zistí, či sa mení viditeľnosť robota pri prechode na domovskú pozíciu. Ak je robot po prechode na domovskú pozíciu skrytý, metóda vráti objekt
Booleans hodnotoutrue, ak zobrazený, tak s hodnotoufalsea ak sa po prechode domov viditeľnosť nemení, metóda vrátinull.- Návratová hodnota:
- objekt
Booleanalebonull - Pozri tiež:
viditeľnýDoma(),zobrazenýDoma(),ukážDoma(),zobrazDoma(),skryDoma(),zachovajViditeľnosťDoma(),skrytý
-
skrytyDoma
public Boolean skrytyDoma()
Alias pre skrytýDoma.
-
ukážDoma
public void ukážDoma()
Spôsobí, že odteraz sa robot vždy pri použití niektorej modifikácie metódy
domovzobrazí.- Pozri tiež:
viditeľnýDoma(),zobrazenýDoma(),skrytýDoma(),zobrazDoma(),skryDoma(),zachovajViditeľnosťDoma(),ukáž
-
ukazDoma
public void ukazDoma()
Alias pre viditeľnýDoma.
-
zobrazDoma
public void zobrazDoma()
Spôsobí, že odteraz sa robot vždy pri použití niektorej modifikácie metódy
domovzobrazí.- Pozri tiež:
viditeľnýDoma(),zobrazenýDoma(),skrytýDoma(),ukážDoma(),skryDoma(),zachovajViditeľnosťDoma(),zobraz
-
skryDoma
public void skryDoma()
Spôsobí, že odteraz sa robot vždy pri použití niektorej modifikácie metódy
domovskryje.- Pozri tiež:
viditeľnýDoma(),zobrazenýDoma(),skrytýDoma(),ukážDoma(),zobrazDoma(),zachovajViditeľnosťDoma(),skry
-
zachovajViditeľnosťDoma
public void zachovajViditeľnosťDoma()
Po použití tejto metódy nebude viditeľnosť robota pri použití niektorej modifikácie metódy
domovovplyvňovaná.- Pozri tiež:
viditeľnýDoma(),zobrazenýDoma(),skrytýDoma(),ukážDoma(),zobrazDoma(),skryDoma()
-
zachovajViditelnostDoma
public void zachovajViditelnostDoma()
Alias pre zachovajViditeľnosťDoma.
-
farbaDoma
public Farba farbaDoma()
Zistí, ako sa mení farba po prechode robota domov. Buď je vrátená konkrétna farba, alebo hodnota
null, ktorá signalizuje, že farba sa po prechode domov nemení.- Návratová hodnota:
- hodnota farby po prechode robota na domovskú
pozíciu alebo
null - Pozri tiež:
farbaDoma(Color),farbaDoma(Farebnosť),farbaDoma(int, int, int),farbaDoma(int, int, int, int),zachovajFarbuDoma(),farba
-
farbaDoma
public void farbaDoma(Color nováFarba)
Nastaví alebo zruší ovplyvňovanie farby robota po jeho prechode domov. Ak je zadaná konkrétna farebná inštancia, tak sa bude farba robota po prechode domov meniť na zadanú hodnotu. Ak je zadaná hodnota
(Farba)null, tak farba nebude po prechode domov ovplyvnená.Poznámka: Hodnota
nullnemá žiadny údajový typ. Je akoby „spoločná pre všetky údajové typy.“ Táto hodnota vyjadruje neprítomnosť žiadneho objektu, neprítomnosť žiadnej inštancie. V skutočnosti nie je a nikdy nebude možné určiť jej typ. Pri volaní metódy musí byť pretypovanie prítomné preto, aby kompilátor dokázal určiť, ktorú verziu z preťažených metód má volať.- Parametre:
nováFarba– nová hodnota farby pera robota, ktorá má byť nastavená po jeho prechode na domovskú pozíciu alebo pretypovaná hodnota(Farba)null- Pozri tiež:
farbaDoma(),farbaDoma(Farebnosť),farbaDoma(int, int, int),farbaDoma(int, int, int, int),zachovajFarbuDoma(),farba
-
farbaDoma
public void farbaDoma(Farebnosť podľaObjektu)
Nastaví alebo zruší ovplyvňovanie farby robota po jeho prechode domov. Ak je zadaná konkrétna farebná inštancia, tak sa bude farba robota po prechode domov meniť na zadanú hodnotu. Ak je zadaná hodnota
(Farebnosť)null, tak farba nebude po prechode domov ovplyvnená.Poznámka: Hodnota
nullnemá žiadny údajový typ. Je akoby „spoločná pre všetky údajové typy.“ Táto hodnota vyjadruje neprítomnosť žiadneho objektu, neprítomnosť žiadnej inštancie. V skutočnosti nie je a nikdy nebude možné určiť jej typ. Pri volaní metódy musí byť pretypovanie prítomné preto, aby kompilátor dokázal určiť, ktorú verziu z preťažených metód má volať.- Parametre:
podľaObjektu– objekt určujúci novú farbu na domovskej pozícii alebo pretypovaná hodnota(Farebnosť)null- Pozri tiež:
farbaDoma(),farbaDoma(Color),farbaDoma(int, int, int),farbaDoma(int, int, int, int),zachovajFarbuDoma()
-
farbaDoma
public Farba farbaDoma(int r, int g, int b)
Nastaví ovplyvňovanie farby robota po jeho prechode domov.
- Parametre:
r– červená zložka novej farby; celé číslo v rozsahu 0 – 255g– zelená zložka novej farby; celé číslo v rozsahu 0 – 255b– modrá zložka novej farby; celé číslo v rozsahu 0 – 255- Návratová hodnota:
- objekt typu
Farba– nová farba - Pozri tiež:
farbaDoma(),farbaDoma(Color),farbaDoma(Farebnosť),farbaDoma(int, int, int, int),zachovajFarbuDoma()
-
farbaDoma
public Farba farbaDoma(int r, int g, int b, int a)
Nastaví ovplyvňovanie farby robota po jeho prechode domov.
- Parametre:
r– červená zložka novej farby; celé číslo v rozsahu 0 – 255g– zelená zložka novej farby; celé číslo v rozsahu 0 – 255b– modrá zložka novej farby; celé číslo v rozsahu 0 – 255a– úroveň (ne)priehľadnosti novej farby; celé číslo v rozsahu 0 – 255 (0 – neviditeľná farba; 255 – nepriehľadná farba)- Návratová hodnota:
- objekt typu
Farba– nová farba - Pozri tiež:
farbaDoma(),farbaDoma(Color),farbaDoma(Farebnosť),farbaDoma(int, int, int),zachovajFarbuDoma()
-
zachovajFarbuDoma
public void zachovajFarbuDoma()
Po použití tejto metódy nebude farba robota pri použití niektorej modifikácie metódy
domovovplyvňovaná.
-
cieľováFarbaDoma
public Farba cieľováFarbaDoma()
Zistí, ako sa mení cieľová farba po prechode robota domov. Buď je vrátená konkrétna farba, alebo hodnota
null, ktorá signalizuje to, že cieľová farba nie je po prechode robota domov ovplyvnená.- Návratová hodnota:
- hodnota cieľovej farby robota po jeho prechode
na domovskú pozíciu alebo
null - Pozri tiež:
cieľováFarbaDoma(Color),cieľováFarbaDoma(Farebnosť),cieľováFarbaDoma(int, int, int),cieľováFarbaDoma(int, int, int, int),zrušíCieľovúFarbuDoma(),zrušCieľovúFarbuDoma(boolean),zrušCieľovúFarbuDoma(),cieľováFarba
-
cielovaFarbaDoma
public Farba cielovaFarbaDoma()
Alias pre cieľováFarbaDoma.
-
cieľováFarbaDoma
public void cieľováFarbaDoma(Color nováFarba)
Zmení nastavenie cieľovej farby robota po jeho prechode domov. Hodnota
(Farba)nullznamená, že ak nie je nastavené zrušenie cieľovej farby doma, tak cieľová farba nie je po prechode domov ovplyvnená.Poznámka: Hodnota
nullnemá žiadny údajový typ. Je akoby „spoločná pre všetky údajové typy.“ Táto hodnota vyjadruje neprítomnosť žiadneho objektu, neprítomnosť žiadnej inštancie. V skutočnosti nie je a nikdy nebude možné určiť jej typ. Pri volaní metódy musí byť pretypovanie prítomné preto, aby kompilátor dokázal určiť, ktorú verziu z preťažených metód má volať.- Parametre:
nováFarba– cieľová farba robota po prechode na domovskú pozíciu alebo pretypovaná hodnota(Farba)null- Pozri tiež:
cieľováFarbaDoma(),cieľováFarbaDoma(Farebnosť),cieľováFarbaDoma(int, int, int),cieľováFarbaDoma(int, int, int, int),zrušíCieľovúFarbuDoma(),zrušCieľovúFarbuDoma(boolean),zrušCieľovúFarbuDoma(),cieľováFarba
-
cielovaFarbaDoma
public void cielovaFarbaDoma(Color nováFarba)
Alias pre cieľováFarbaDoma.
-
cieľováFarbaDoma
public void cieľováFarbaDoma(Farebnosť podľaObjektu)
Zmení nastavenie cieľovej farby robota po jeho prechode domov. Hodnota
(Farebnosť)nullznamená, že cieľová farba nie je po prechode domov ovplyvnená.Poznámka: Hodnota
nullnemá žiadny údajový typ. Je akoby „spoločná pre všetky údajové typy.“ Táto hodnota vyjadruje neprítomnosť žiadneho objektu, neprítomnosť žiadnej inštancie. V skutočnosti nie je a nikdy nebude možné určiť jej typ. Pri volaní metódy musí byť pretypovanie prítomné preto, aby kompilátor dokázal určiť, ktorú verziu z preťažených metód má volať.- Parametre:
podľaObjektu– objekt určujúci nastavenie cieľovej farby robota, ktorá bude použitá pri jeho prechode na domovskú pozíciu, pričom pretypovaná hodnota(Farebnosť)nullsignalizuje zrušenie nastavenia cieľovej farby pri prechode domov- Pozri tiež:
cieľováFarbaDoma(),cieľováFarbaDoma(Color),cieľováFarbaDoma(int, int, int),cieľováFarbaDoma(int, int, int, int),zrušíCieľovúFarbuDoma(),zrušCieľovúFarbuDoma(boolean),zrušCieľovúFarbuDoma()
-
cielovaFarbaDoma
public void cielovaFarbaDoma(Farebnosť podľaObjektu)
Alias pre cieľováFarbaDoma.
-
cieľováFarbaDoma
public Farba cieľováFarbaDoma(int r, int g, int b)
Nastaví cieľovú farbu robota po jeho prechode domov.
- Parametre:
r– červená zložka novej farby; celé číslo v rozsahu 0 – 255g– zelená zložka novej farby; celé číslo v rozsahu 0 – 255b– modrá zložka novej farby; celé číslo v rozsahu 0 – 255- Návratová hodnota:
- objekt typu
Farba– nová cieľová farba - Pozri tiež:
cieľováFarbaDoma(),cieľováFarbaDoma(Color),cieľováFarbaDoma(Farebnosť),cieľováFarbaDoma(int, int, int, int),zrušíCieľovúFarbuDoma(),zrušCieľovúFarbuDoma(boolean),zrušCieľovúFarbuDoma()
-
cielovaFarbaDoma
public Farba cielovaFarbaDoma(int r, int g, int b)
Alias pre cieľováFarbaDoma.
-
cieľováFarbaDoma
public Farba cieľováFarbaDoma(int r, int g, int b, int a)
Nastaví cieľovú farbu robota po jeho prechode domov.
- Parametre:
r– červená zložka novej farby; celé číslo v rozsahu 0 – 255g– zelená zložka novej farby; celé číslo v rozsahu 0 – 255b– modrá zložka novej farby; celé číslo v rozsahu 0 – 255a– úroveň (ne)priehľadnosti novej farby; celé číslo v rozsahu 0 – 255 (0 – neviditeľná farba; 255 – nepriehľadná farba)- Návratová hodnota:
- objekt typu
Farba– nová cieľová farba - Pozri tiež:
cieľováFarbaDoma(),cieľováFarbaDoma(Color),cieľováFarbaDoma(Farebnosť),cieľováFarbaDoma(int, int, int),zrušíCieľovúFarbuDoma(),zrušCieľovúFarbuDoma(boolean),zrušCieľovúFarbuDoma()
-
cielovaFarbaDoma
public Farba cielovaFarbaDoma(int r, int g, int b, int a)
Alias pre cieľováFarbaDoma.
-
zrušíCieľovúFarbuDoma
public boolean zrušíCieľovúFarbuDoma()
Overí, či bude po použití niektorej modifikácie metódy
domovcieľová farba zrušená, alebo nie.- Návratová hodnota:
true– cieľová farba bude po prechode robota domov zrušená;true– cieľová farba bude nastavená na konkrétnu farbu alebo nebude ovplyvnená – pozri metóducieľováFarbaDoma- Pozri tiež:
cieľováFarbaDoma(),cieľováFarbaDoma(Color),cieľováFarbaDoma(Farebnosť),cieľováFarbaDoma(int, int, int),cieľováFarbaDoma(int, int, int, int),zrušCieľovúFarbuDoma(boolean),zrušCieľovúFarbuDoma()
-
zrusiCielovuFarbuDoma
public boolean zrusiCielovuFarbuDoma()
Alias pre zrušCieľovúFarbuDoma.
-
zrušCieľovúFarbuDoma
public void zrušCieľovúFarbuDoma(boolean zruš)
Táto metóda umožňuje nastaviť správanie zmeny cieľovej farby robota po prechode na domovskú pozíciu. Ak je hodnota parametra
zrušrovnátrue, tak cieľová farba bude po použití niektorej modifikácie metódydomovzrušená, v opačnom prípade závisí od nastavenia parametra robotacieľováFarbaDoma.- Parametre:
zruš– hodnotatrueznamená, že cieľová farba bude po prechode domov zrušená a hodnotafalseznamená, že zmena cieľovej farby pri prechode domov závisí od nastavenia parametra robotacieľováFarbaDoma- Pozri tiež:
cieľováFarbaDoma(),cieľováFarbaDoma(Color),cieľováFarbaDoma(Farebnosť),cieľováFarbaDoma(int, int, int),cieľováFarbaDoma(int, int, int, int),zrušíCieľovúFarbuDoma(),zrušCieľovúFarbuDoma()
-
zrusCielovuFarbuDoma
public void zrusCielovuFarbuDoma(boolean zruš)
Alias pre zrušCieľovúFarbuDoma.
-
zrušCieľovúFarbuDoma
public void zrušCieľovúFarbuDoma()
Po použití tejto metódy bude cieľová farba robota pri použití niektorej modifikácie metódy
domovzrušená.
-
zrusCielovuFarbuDoma
public void zrusCielovuFarbuDoma()
Alias pre zrušCieľovúFarbuDoma.
-
hrúbkaPeraDoma
public Double hrúbkaPeraDoma()
Zistí, ako sa mení hrúbka pera po prechode robota domov. Buď je vrátená konkrétna číselná hodnota, alebo hodnota
null, ktorá signalizuje, že hrúbka pera sa po prechode domov nemení.- Návratová hodnota:
- hrúbka pera domovskej pozície alebo
null - Pozri tiež:
hrúbkaČiaryDoma(),hrúbkaPeraDoma(Double),hrúbkaČiaryDoma(Double),zachovajHrúbkuPeraDoma(),zachovajHrúbkuČiaryDoma(),hrúbkaPera,parametreVzoruPeraDoma(double, double...)
-
hrubkaPeraDoma
public Double hrubkaPeraDoma()
Alias pre hrúbkaPeraDoma.
-
hrúbkaČiaryDoma
public Double hrúbkaČiaryDoma()
Zistí, ako sa mení hrúbka pera po prechode robota domov. Buď je vrátená konkrétna číselná hodnota, alebo hodnota
null, ktorá signalizuje, že hrúbka pera sa po prechode domov nemení.- Návratová hodnota:
- hrúbka pera domovskej pozície alebo
null - Pozri tiež:
hrúbkaPeraDoma(),hrúbkaPeraDoma(Double),hrúbkaČiaryDoma(Double),zachovajHrúbkuPeraDoma(),zachovajHrúbkuČiaryDoma(),hrúbkaČiary,parametreVzoruČiaryDoma(double, double...)
-
hrubkaCiaryDoma
public Double hrubkaCiaryDoma()
Alias pre hrúbkaPeraDoma.
-
hrúbkaPeraDoma
public void hrúbkaPeraDoma(Double nováHrúbka)
Nastaví alebo zruší ovplyvňovanie hrúbky pera po prechode robota domov. Ak je zadaná konkrétna číselná hodnota, hrúbka pera robota bude po prechode domov upravená na zadanú hodnotu. Ak je zadaná hodnota
null, tak hrúbka pera nebude po prechode domov ovplyvnená.- Parametre:
nováHrúbka– nová hrúbka pera domovskej pozície alebonull- Pozri tiež:
hrúbkaPeraDoma(),hrúbkaČiaryDoma(),hrúbkaČiaryDoma(Double),zachovajHrúbkuPeraDoma(),zachovajHrúbkuČiaryDoma(),hrúbkaPera,parametreVzoruPeraDoma(double, double...)
-
hrubkaPeraDoma
public void hrubkaPeraDoma(Double nováHrúbka)
Alias pre hrúbkaPeraDoma.
-
hrúbkaČiaryDoma
public void hrúbkaČiaryDoma(Double nováHrúbka)
Nastaví alebo zruší ovplyvňovanie hrúbky pera po prechode robota domov. Ak je zadaná konkrétna číselná hodnota, hrúbka pera robota bude po prechode domov upravená na zadanú hodnotu. Ak je zadaná hodnota
null, tak hrúbka pera nebude po prechode domov ovplyvnená.- Parametre:
nováHrúbka– nová hrúbka pera domovskej pozície alebonull- Pozri tiež:
hrúbkaPeraDoma(),hrúbkaČiaryDoma(),hrúbkaPeraDoma(Double),zachovajHrúbkuPeraDoma(),zachovajHrúbkuČiaryDoma(),hrúbkaČiary,parametreVzoruČiaryDoma(double, double...)
-
hrubkaCiaryDoma
public void hrubkaCiaryDoma(Double nováHrúbka)
Alias pre hrúbkaPeraDoma.
-
zachovajHrúbkuPeraDoma
public void zachovajHrúbkuPeraDoma()
Po použití tejto metódy nebude hrúbka pera robota pri použití niektorej modifikácie metódy
domovovplyvňovaná.
-
zachovajHrubkuPeraDoma
public void zachovajHrubkuPeraDoma()
Alias pre zachovajHrúbkuPeraDoma.
-
zachovajHrúbkuČiaryDoma
public void zachovajHrúbkuČiaryDoma()
Po použití tejto metódy nebude hrúbka pera robota pri použití niektorej modifikácie metódy
domovovplyvňovaná.
-
zachovajHrubkuCiaryDoma
public void zachovajHrubkuCiaryDoma()
Alias pre zachovajHrúbkuČiaryDoma.
-
predvolenýVzorČiary
public void predvolenýVzorČiary()
Nastaví vzor čiary pera na predvolený, čo je plná neprerušovaná čiara. Metóda zároveň zresetuje posun vzoru čiary pera.
-
predvolenyVzorCiary
public void predvolenyVzorCiary()
Alias pre predvolenýVzorČiary.
-
predvolenýVzorPera
public void predvolenýVzorPera()
Nastaví vzor čiary pera na predvolený, čo je plná neprerušovaná čiara. Metóda zároveň zresetuje posun vzoru čiary pera.
-
predvolenyVzorPera
public void predvolenyVzorPera()
Alias pre predvolenýVzorPera.
-
vzorČiary
public void vzorČiary(double začiatokVzoru, double... pokračovanieVzoru)Upraví vzor čiary pera. Vzorom sa myslí striedanie čiarok a medzier rôznych dĺžok súbežných s líniou kreslenej krivky – čiarkovanie.
Dĺžky čiarok vzoru sú uvádzané v pixeloch. Každá hodnota striedavo určuje kreslenú a vynechávanú časť. Ak je počet hodnôt nepárny, tak sa celý vzor zopakuje v inverznom význame hodnôt, čiže pri druhom opakovaní bude
začiatokVzoruoznačovať vynechanú (nekreslenú) časť, ale pri treťom opäť kreslenú a tak ďalej. Pozrite sa na obrázok nižšie:
Zobrazenie rôznych vzorov podľa opisu nižšie.Smerom zdola nahor narastá hrúbka čiarky a smerom zľava doprava narastá dĺžka čiarok vzoru, pričom sa striedajú vzory s nepárnym a párnym počtom hodnôt. Napríklad prvé dve čiary zľava sú vyrobené z dĺžok
1(nepárny počet dĺžok – čiže rovnaká hodnota sa strieda pre kreslenú aj vynechanú časť) a1,2(párny počet dĺžok – čiže prvá hodnota vyjadruje kreslenú dĺžku a druhá vynechanú). Ďalšie dve čiary sú zložené z dĺžok2a2,4a takto dĺžky stúpajú až po hodnoty11a11,22. (So zmenou hrúby sa vždy reštartuje čiarkovanie, čo by sa dalo „doladiť“ metódouposunVzoruČiary. Hrúbka rastie od1po8.)Tvorba vzoru so zadanými párnymi alebo nepárnymi dĺžkami bude možno lepšie pochopiteľná z nasledujúceho obrázka:

Zobrazenie rôznych vzorov podľa opisu nižšie.Prvá čiara je vytvorená zo vzoru zadaného ako jedna hodnota, ktorú pomenujme n. To znamená, že sa striedajú rovnaké kreslené a vynechané dĺžky (n). Druhá čiara je vytvorená z dvoch hodnôt: n a 2 × n. Tretia čiara z troch hodnôt: n, 2 × n a 3 × n. Pri nej si všimnite ako sa striedajú kreslené a vynechané časti: prvá je kreslená časť s dĺžkou n, potom nasleduje vynechaná časť s dĺžkou 2 × n, potom opäť kreslená s dĺžkou 3 × n a potom sa opakovanie vymení – štvrtá časť je vynechaná s dĺžkou n, piata kreslená s dĺžkou 2 × n a tak ďalej. Štvrtý riadok opäť obsahuje párny počet hodnôt (n, 2n, 3n a 4n), takže všetky kreslené a vynechané časti sa opakujú stále v rovnakom poradí. Takto to pokračuje až po čiaru vzoru s párnym počtom hodnôt: n, 2n, 3n, 4nn, 5n a 6n.
Ak chceme vzor čiary pera zrušiť, použijeme metódu
predvolenýVzorPera.- Parametre:
začiatokVzoru– prvý prvok vzoru čiary pera (čiarkovania); tento parameter je povinný, aby Java vedela rozlíšiť, či chceme vzor čiary čítať alebo zapisovaťpokračovanieVzoru– zoznam parametrov určujúcich ostatné dĺžky kreslených a vynechávaných čiarok (čiarkovanie)- Pozri tiež:
vzorČiary(double[]),vzorPera(double[]),vzorPera(double, double...),vzorČiary(),vzorPera(),posunVzoruČiary(double),posunVzoruPera(double),posunVzoruČiary(),posunVzoruPera(),predvolenýVzorČiary(),predvolenýVzorPera(),parametreVzoruČiaryDoma(double, double...),hrúbkaPera(double),hrúbkaČiary(double),čiara(Stroke)
-
vzorCiary
public void vzorCiary(double začiatokVzoru, double... pokračovanieVzoru) Alias pre vzorČiary.
-
vzorČiary
public void vzorČiary(double[] novýVzor)
Upraví vzor čiary pera. Toto je alternatívna verzia metódy
vzorČiary(začiatokVzoru, pokračovanieVzoru). Viac podrobností o fungovaní vzoru čiary nájdete v jej opise. Hlavný rozdiel je v tom, že táto metóda prijíma pole dĺžok a metódavzorČiary(začiatokVzoru, pokračovanieVzoru)prijíma zoznam parametrov. V rôznych situáciách môže byť výhodnejšie jedno alebo druhé.- Parametre:
novýVzor– pole prvkov určujúcich dĺžky kreslených a vynechávaných čiarok (čiarkovanie)- Pozri tiež:
vzorČiary(double, double...),vzorPera(double, double...),vzorPera(double[])
-
vzorCiary
public void vzorCiary(double[] novýVzor)
Alias pre vzorČiary.
-
vzorČiary
public double[] vzorČiary()
Vráti aktuálny vzor čiary pera. Pozri metódu
vzorČiary(začiatokVzoru, pokračovanieVzoru).- Návratová hodnota:
- aktuálny vzor čiary pera
- Pozri tiež:
vzorČiary(double, double...),vzorPera(double, double...),vzorPera(),posunVzoruČiary(double),posunVzoruPera(double),posunVzoruČiary(),posunVzoruPera(),predvolenýVzorČiary(),predvolenýVzorPera(),parametreVzoruČiaryDoma(),hrúbkaPera(double),hrúbkaČiary(double),čiara(Stroke)
-
vzorCiary
public double[] vzorCiary()
Alias pre vzorČiary.
-
posunVzoruČiary
public void posunVzoruČiary(double posun)
Upraví posun vzoru čiary pera. Pozri aj:
vzorČiary. Posun (alebo fáza) je nezáporná hodnota, ktorá posúva začiatok vzoru – čiarkovania čiary. Najlepšie to vyjadrujú nasledujúce obrázky:
Zobrazenie rôznych fáz čiar rovnakého vzoru. Horné čiary majú vždy nulový posun, ktorý plynule rastie po jednotkách smerom nadol.
- Parametre:
posun– určuje posun (fázu) vzoru (čiarkovania) čiary od začiatku kreslenej krivky; nezáporná hodnota- Pozri tiež:
vzorČiary(double, double...),vzorPera(double, double...),posunVzoruPera(double),posunVzoruČiary(),posunVzoruPera(),predvolenýVzorČiary(),predvolenýVzorPera(),parametreVzoruČiaryDoma(double, double...),hrúbkaPera(double),hrúbkaČiary(double),čiara(Stroke)
-
posunVzoruCiary
public void posunVzoruCiary(double posun)
Alias pre posunVzoruČiary.
-
posunVzoruČiary
public double posunVzoruČiary()
Vráti aktuálny posun vzoru čiary pera. Pozri metódu
posunVzoruČiary(posun).- Návratová hodnota:
- aktuálny posun vzoru čiary pera
- Pozri tiež:
vzorČiary(double, double...),vzorPera(double, double...),vzorČiary(),vzorPera(),posunVzoruČiary(double),posunVzoruPera(double),posunVzoruPera(),predvolenýVzorČiary(),predvolenýVzorPera(),parametreVzoruČiaryDoma(),hrúbkaPera(double),hrúbkaČiary(double),čiara(Stroke)
-
posunVzoruCiary
public double posunVzoruCiary()
Alias pre posunVzoruČiary.
-
parametreVzoruČiaryDoma
public double[] parametreVzoruČiaryDoma()
Zistí, aké parametre majú byť nastavené vzoru čiary pera pri prechode robota domov. Ak robot pri prechode domov vzor čiary nemení, tak je vrátená hodnota
null. Ak mení čiaru na plnú, tak je vrátené prázdne pole. Ak mení vzor čiary podľa určitého zadania, tak je vrátene pole obsahujúce posun vzoru v prvom prvku (s indexom0) a charakter vzoru (čiarkovanie) v ostatných prvkoch poľa.Pozor! Všimnite si, že prvý prvok poľa pri použití určitého vzoru označuje posun – fázu vzoru.
- Návratová hodnota:
- parametre vzoru čiary pera pri prechode robota
domov uložené v poli prvkov typu
double - Pozri tiež:
parametreVzoruČiaryDoma(double, double...),zachovajVzorČiaryDoma(),hrúbkaČiaryDoma()
-
parametreVzoruCiaryDoma
public double[] parametreVzoruCiaryDoma()
Alias pre parametreVzoruČiaryDoma.
-
parametreVzoruČiaryDoma
public void parametreVzoruČiaryDoma(double posunVzoru, double... charakterVzoru)Nastaví parametre vzoru čiary pera použité pri prechode robota domov.
Prvým parametrom je posun vzoru, ktorý môže byť aj nulový.
Smerodajnejšími sú ďalšie parametre (zoznam), ktoré určujú charakter vzoru – pozri aj
vzorČiary. Ak nie je ani jeden z týchto parametrov nastavený, znamená to, že robot si má pri prechode domov nastaviť plnú čiaru. V takom prípade je hodnota posunu irelevantná.V opačnom prípade určujú parametre charakter vzoru (čiarkovanie) a posun sa do úvahy berie.
Ak chceme tieto parametre zrušiť a nastaviť robot tak, aby pri prechode domov vzor čiary nemenil, tak použijeme metódu
zachovajVzorČiaryDoma.- Parametre:
posunVzoru– posun vzoru čiary pera nastavený pri prechode robota domovcharakterVzoru– charakter vzoru čiary pera nastavený pri prechode robota domov- Pozri tiež:
parametreVzoruČiaryDoma(),zachovajVzorČiaryDoma(),hrúbkaČiaryDoma(Double)
-
parametreVzoruCiaryDoma
public void parametreVzoruCiaryDoma(double posunVzoru, double... charakterVzoru) Alias pre parametreVzoruČiaryDoma.
-
zachovajVzorČiaryDoma
public void zachovajVzorČiaryDoma()
Zruší zmenu parametrov čiarkovania, vrátane jeho posunu, pri prechode robota domov.
-
zachovajVzorCiaryDoma
public void zachovajVzorCiaryDoma()
Alias pre zachovajVzorČiaryDoma.
-
vzorPera
public void vzorPera(double začiatokVzoru, double... pokračovanieVzoru)Upraví vzor čiary pera. Vzorom sa myslí striedanie čiarok a medzier rôznych dĺžok súbežných s líniou kreslenej krivky – čiarkovanie.
Dĺžky čiarok vzoru sú uvádzané v pixeloch. Každá hodnota striedavo určuje kreslenú a vynechávanú časť. Ak je počet hodnôt nepárny, tak sa celý vzor zopakuje v inverznom význame hodnôt, čiže pri druhom opakovaní bude
začiatokVzoruoznačovať vynechanú (nekreslenú) časť, ale pri treťom opäť kreslenú a tak ďalej. Pozrite sa na obrázok nižšie:
Zobrazenie rôznych vzorov podľa opisu nižšie.Smerom zdola nahor narastá hrúbka čiarky a smerom zľava doprava narastá dĺžka čiarok vzoru, pričom sa striedajú vzory s nepárnym a párnym počtom hodnôt. Napríklad prvé dve čiary zľava sú vyrobené z dĺžok
1(nepárny počet dĺžok – čiže rovnaká hodnota sa strieda pre kreslenú aj vynechanú časť) a1,2(párny počet dĺžok – čiže prvá hodnota vyjadruje kreslenú dĺžku a druhá vynechanú). Ďalšie dve čiary sú zložené z dĺžok2a2,4a takto dĺžky stúpajú až po hodnoty11a11,22. (So zmenou hrúby sa vždy reštartuje čiarkovanie, čo by sa dalo „doladiť“ metódouposunVzoruPera. Hrúbka rastie od1po8.)Tvorba vzoru so zadanými párnymi alebo nepárnymi dĺžkami bude možno lepšie pochopiteľná z nasledujúceho obrázka:
Zobrazenie rôznych vzorov podľa opisu nižšie.Prvá čiara je vytvorená zo vzoru zadaného ako jedna hodnota, ktorú pomenujme n. To znamená, že sa striedajú rovnaké kreslené a vynechané dĺžky (n). Druhá čiara je vytvorená z dvoch hodnôt: n a 2 × n. Tretia čiara z troch hodnôt: n, 2 × n a 3 × n. Pri nej si všimnite ako sa striedajú kreslené a vynechané časti: prvá je kreslená časť s dĺžkou n, potom nasleduje vynechaná časť s dĺžkou 2 × n, potom opäť kreslená s dĺžkou 3 × n a potom sa opakovanie vymení – štvrtá časť je vynechaná s dĺžkou n, piata kreslená s dĺžkou 2 × n a tak ďalej. Štvrtý riadok opäť obsahuje párny počet hodnôt (n, 2n, 3n a 4n), takže všetky kreslené a vynechané časti sa opakujú stále v rovnakom poradí. Takto to pokračuje až po čiaru vzoru s párnym počtom hodnôt: n, 2n, 3n, 4nn, 5n a 6n.
Ak chceme vzor čiary pera zrušiť, použijeme metódu
predvolenýVzorPera.- Parametre:
začiatokVzoru– prvý prvok vzoru čiary pera (čiarkovania); tento parameter je povinný, aby Java vedela rozlíšiť, či chceme vzor čiary čítať alebo zapisovaťpokračovanieVzoru– zoznam parametrov určujúcich ostatné dĺžky kreslených a vynechávaných čiarok (čiarkovanie)- Pozri tiež:
vzorČiary(double[]),vzorPera(double[]),vzorČiary(double, double...),vzorČiary(),vzorPera(),posunVzoruČiary(double),posunVzoruPera(double),posunVzoruČiary(),posunVzoruPera(),predvolenýVzorČiary(),predvolenýVzorPera(),parametreVzoruČiaryDoma(double, double...),hrúbkaPera(double),hrúbkaČiary(double),čiara(Stroke)
-
vzorPera
public void vzorPera(double[] novýVzor)
Upraví vzor čiary pera. Toto je alternatívna verzia metódy
vzorPera(začiatokVzoru, pokračovanieVzoru). Viac podrobností o fungovaní vzoru čiary nájdete v jej opise. Hlavný rozdiel je v tom, že táto metóda prijíma pole dĺžok a metódavzorPera(začiatokVzoru, pokračovanieVzoru)prijíma zoznam parametrov. V rôznych situáciách môže byť výhodnejšie jedno alebo druhé.- Parametre:
novýVzor– pole prvkov určujúcich dĺžky kreslených a vynechávaných čiarok (čiarkovanie)- Pozri tiež:
vzorČiary(double, double...),vzorPera(double, double...),vzorČiary(double[])
-
vzorPera
public double[] vzorPera()
Vráti aktuálny vzor čiary pera. Pozri metódu
vzorPera(začiatokVzoru, pokračovanieVzoru).- Návratová hodnota:
- aktuálny vzor čiary pera
- Pozri tiež:
vzorČiary(double, double...),vzorPera(double, double...),vzorČiary(),posunVzoruČiary(double),posunVzoruPera(double),posunVzoruČiary(),posunVzoruPera(),predvolenýVzorČiary(),predvolenýVzorPera(),parametreVzoruČiaryDoma(),hrúbkaPera(double),hrúbkaČiary(double),čiara(Stroke)
-
posunVzoruPera
public void posunVzoruPera(double posun)
Upraví posun vzoru čiary pera. Pozri aj:
vzorPera. Posun (alebo fáza) je nezáporná hodnota, ktorá posúva začiatok vzoru – čiarkovania čiary. Najlepšie to vyjadrujú nasledujúce obrázky:Zobrazenie rôznych fáz čiar rovnakého vzoru. Horné čiary majú vždy nulový posun, ktorý plynule rastie po jednotkách smerom nadol.
- Parametre:
posun– určuje posun (fázu) vzoru (čiarkovania) čiary od začiatku kreslenej krivky; nezáporná hodnota- Pozri tiež:
vzorČiary(double, double...),vzorPera(double, double...),posunVzoruČiary(double),posunVzoruČiary(),posunVzoruPera(),predvolenýVzorČiary(),predvolenýVzorPera(),parametreVzoruPeraDoma(double, double...),hrúbkaPera(double),hrúbkaČiary(double),čiara(Stroke)
-
posunVzoruPera
public double posunVzoruPera()
Vráti aktuálny posun vzoru čiary pera. Pozri metódu
posunVzoruPera(posun).- Návratová hodnota:
- aktuálny posun vzoru čiary pera
- Pozri tiež:
vzorČiary(double, double...),vzorPera(double, double...),vzorČiary(),vzorPera(),posunVzoruČiary(double),posunVzoruPera(double),posunVzoruČiary(),predvolenýVzorČiary(),predvolenýVzorPera(),parametreVzoruČiaryDoma(),hrúbkaPera(double),hrúbkaČiary(double),čiara(Stroke)
-
parametreVzoruPeraDoma
public double[] parametreVzoruPeraDoma()
Zistí, aké parametre majú byť nastavené vzoru čiary pera pri prechode robota domov. Ak robot pri prechode domov vzor čiary nemení, tak je vrátená hodnota
null. Ak mení čiaru na plnú, tak je vrátené prázdne pole. Ak mení vzor čiary podľa určitého zadania, tak je vrátene pole obsahujúce posun vzoru v prvom prvku (s indexom0) a charakter vzoru (čiarkovanie) v ostatných prvkoch poľa.Pozor! Všimnite si, že prvý prvok poľa pri použití určitého vzoru označuje posun – fázu vzoru.
- Návratová hodnota:
- parametre vzoru čiary pera pri prechode robota
domov uložené v poli prvkov typu
double - Pozri tiež:
parametreVzoruPeraDoma(double, double...),zachovajVzorPeraDoma(),hrúbkaPeraDoma()
-
parametreVzoruPeraDoma
public void parametreVzoruPeraDoma(double posunVzoru, double... charakterVzoru)Nastaví parametre vzoru čiary pera použité pri prechode robota domov.
Prvým parametrom je posun vzoru, ktorý môže byť aj nulový.
Smerodajnejšími sú ďalšie parametre (zoznam), ktoré určujú charakter vzoru – pozri aj
vzorPera. Ak nie je ani jeden z týchto parametrov nastavený, znamená to, že robot si má pri prechode domov nastaviť plnú čiaru. V takom prípade je hodnota posunu irelevantná.V opačnom prípade určujú parametre charakter vzoru (čiarkovanie) a posun sa do úvahy berie.
Ak chceme tieto parametre zrušiť a nastaviť robot tak, aby pri prechode domov vzor čiary nemenil, tak použijeme metódu
zachovajVzorPeraDoma.- Parametre:
posunVzoru– posun vzoru čiary pera nastavený pri prechode robota domovcharakterVzoru– charakter vzoru čiary pera nastavený pri prechode robota domov- Pozri tiež:
parametreVzoruPeraDoma(),zachovajVzorPeraDoma(),hrúbkaPeraDoma(Double)
-
zachovajVzorPeraDoma
public void zachovajVzorPeraDoma()
Zruší zmenu parametrov čiarkovania, vrátane jeho posunu, pri prechode robota domov.
-
veľkosťDoma
public Double veľkosťDoma()
Zistí, ako sa mení veľkosť robota po jeho prechode na domovskú pozíciu. Buď je vrátená konkrétna číselná hodnota, alebo hodnota
null, ktorá signalizuje, že veľkosť robota sa po prechode domov nemení.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Návratová hodnota:
- hodnota veľkosti robota po prechode na domovskú
pozíciu alebo
null - Pozri tiež:
pomerDoma(),rozmerDoma(),zachovajVeľkosťDoma(),veľkosť()
-
velkostDoma
public Double velkostDoma()
Alias pre veľkosťDoma.
-
pomerDoma
public Double pomerDoma()
Zistí, ako sa mení pomer veľkosti robota po jeho prechode na domovskú pozíciu. Buď je vrátená konkrétna číselná hodnota, alebo hodnota
null, ktorá signalizuje, že pomer veľkosti robota sa po prechode domov nemení.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Návratová hodnota:
- hodnota pomeru veľkosti robota po prechode na
domovskú pozíciu alebo
null - Pozri tiež:
veľkosťDoma(),rozmerDoma(),zachovajPomerDoma(),pomer()
-
rozmerDoma
public Rozmer rozmerDoma()
Zistí, či a ako sa budú meniť rozmery (šírky a výšky robota po prechode na domovskú pozíciu. V skutočnosti (pozri poznámku nižšie) ide o prepočítané hodnoty dvoch iných vlastností:
veľkosťDomaapomerDoma. Ak je hociktorá z týchto dvoch vlastností nenastavená (rovnánull), tak bude návratová hodnota tejto metódynull, pretože domovský rozmer bez nich nemôže byť vypočítaný.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).veľkosťDomapomerDoma- Návratová hodnota:
- objekt obsahujúci zmenu rozmerov robota po
prechode na domovskú pozíciu alebo
null - Pozri tiež:
veľkosťDoma(),pomerDoma(),zachovajRozmerDoma(),rozmery()
-
veľkosťDoma
public void veľkosťDoma(Double nováVeľkosť)
Nastaví alebo zruší ovplyvňovanie veľkosti robota po jeho prechode na domovskú pozíciu. Ak je zadaná konkrétna číselná hodnota, veľkosť robota bude po prechode domov upravená na zadanú hodnotu. Ak je zadaná hodnota
null, tak veľkosť robota nebude po prechode domov ovplyvnená.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Parametre:
nováVeľkosť– nová veľkosť robota, ktorá bude nastavená pri prechode robota na domovskú pozíciu alebonull- Pozri tiež:
pomerDoma(Double),rozmerDoma(Rozmer),zachovajVeľkosťDoma(),veľkosť(double)
-
velkostDoma
public void velkostDoma(Double nováVeľkosť)
Alias pre veľkosťDoma.
-
pomerDoma
public void pomerDoma(Double novýPomer)
Nastaví alebo zruší ovplyvňovanie pomeru veľkosti robota po jeho prechode na domovskú pozíciu. Ak je zadaná konkrétna číselná hodnota, tak bude pomer veľkosti robota po prechode domov upravený na zadanú hodnotu. Ak je zadaná hodnota
null, tak sa pomer veľkosti robota po prechode domov nezmení.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Parametre:
novýPomer– nová hodnota pomeru veľkosti pri prechode na domovskú pozíciu;nullznamená „nemeniť pomer pri prechode na domovskú pozíciu“- Pozri tiež:
veľkosťDoma(Double),rozmerDoma(Rozmer),zachovajPomerDoma(),pomer(double)
-
rozmerDoma
public void rozmerDoma(Rozmer novýRozmer)
Nastaví alebo zruší nastavovanie zmeny rozmerov (šírky a výšky) robota po prechode na domovskú pozíciu. V skutočnosti nastavuje táto metóda hodnoty dvojice vlastností
veľkosťDomaapomerDoma. Ich hodnoty sú prepočítané podľa pravidiel, ktoré sú rozpísané v upozornení v opise metódyrozmery(šírka, výška)(pozri aj poznámku nižšie). Ak je hodnota nového rozmeru rovnánull, tak budú obidve vlastnosti (domovská veľkosť a domovský pomer veľkosti) nastavené nanull.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Parametre:
novýRozmer– inštancia rozmeru, ktorého hodnoty budú prepočítané naveľkosťDomaapomerDomaalebo hodnotanull- Pozri tiež:
veľkosťDoma(Double),pomerDoma(Double),zachovajRozmerDoma(),rozmery(Rozmer)
-
zachovajVeľkosťDoma
public void zachovajVeľkosťDoma()
Po použití tejto metódy nebude veľkosť robota pri použití niektorej modifikácie metódy
domovovplyvňovaná.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Pozri tiež:
veľkosťDoma(),pomerDoma(),rozmerDoma(),veľkosťDoma(Double)
-
zachovajVelkostDoma
public void zachovajVelkostDoma()
Alias pre zachovajVeľkosťDoma.
-
zachovajPomerDoma
public void zachovajPomerDoma()
Po použití tejto metódy nebude pomer veľkosti robota (šírky a výšky) pri použití niektorej modifikácie metódy
domovovplyvňovaný.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Pozri tiež:
veľkosťDoma(),pomerDoma(),rozmerDoma(),pomerDoma(Double)
-
zachovajRozmerDoma
public void zachovajRozmerDoma()
Volanie tejto metódy je ekvivalentné volaniu tejto dvojice metód:
Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Pozri tiež:
veľkosťDoma(),pomerDoma(),rozmerDoma(),rozmerDoma(Rozmer)
-
priehľadnosťDoma
public Double priehľadnosťDoma()
Zistí, ako sa mení priehľadnosť robota po jeho prechode na domovskú pozíciu. Buď je vrátená konkrétna číselná hodnota, alebo hodnota
null, ktorá signalizuje, že priehľadnosť robota sa po prechode domov nemení.- Návratová hodnota:
- hodnota priehľadnosti robota po jeho prechode
na domovskú pozíciu alebo
null - Pozri tiež:
priehľadnosťDoma(Double),zachovajPriehľadnosťDoma(),priehľadnosť()
-
priehladnostDoma
public Double priehladnostDoma()
Alias pre priehľadnosťDoma.
-
priehľadnosťDoma
public void priehľadnosťDoma(Double nováPriehľadnosť)
Nastaví alebo zruší ovplyvňovanie priehľadnosti robota po jeho prechode na domovskú pozíciu. Ak je zadaná konkrétna číselná hodnota, priehľadnosť robota bude po prechode domov upravená na zadanú hodnotu. Ak je zadaná hodnota
null, tak priehľadnosť robota nebude po prechode domov ovplyvnená.- Parametre:
nováPriehľadnosť– nová priehľadnosť robota na domovskej pozícii alebonull- Pozri tiež:
priehľadnosťDoma(),zachovajPriehľadnosťDoma(),priehľadnosť()
-
priehladnostDoma
public void priehladnostDoma(Double nováPriehľadnosť)
Alias pre priehľadnosťDoma.
-
zachovajPriehľadnosťDoma
public void zachovajPriehľadnosťDoma()
Po použití tejto metódy nebude priehľadnosť robota pri použití niektorej modifikácie metódy
domovovplyvňovaná.- Pozri tiež:
priehľadnosťDoma(),priehľadnosťDoma(Double)
-
zachovajPriehladnostDoma
public void zachovajPriehladnostDoma()
Alias pre zachovajPriehľadnosťDoma.
-
písmoDoma
public Písmo písmoDoma()
Zistí, ako sa mení písmo robota po jeho prechode na domovskú pozíciu. Buď je vrátený konkrétny objekt reprezentujúci písmo, alebo hodnota
null, ktorá signalizuje, že písmo robota sa po prechode domov nemení.- Návratová hodnota:
- písmo, ktoré bude nastavené po prechode robota na
domovskú pozíciu alebo
null - Pozri tiež:
písmoDoma(Font),písmoDoma(String, double),zachovajPísmoDoma(),písmo()
-
písmoDoma
public void písmoDoma(Font novéPísmo)
Nastaví alebo zruší zmenu písma robota po jeho prechode na domovskú pozíciu. Ak je zadaný objekt typu
PísmoaleboFont, tak písmo robota sa po prechode domov zmení podľa zadaného objektu. Ak je zadaná hodnotanull, tak písmo robota nebude po prechode domov ovplyvnené.- Parametre:
novéPísmo– objekt typuPísmoaleboFontalebonull- Pozri tiež:
písmoDoma(),písmoDoma(String, double),zachovajPísmoDoma(),písmo(String, double)
-
písmoDoma
public Písmo písmoDoma(String názov, double veľkosť)
Určí nové písmo robota, ktoré bude nastavené po jeho prechode na domovskú pozíciu.
- Parametre:
názov– názov písma; môže byť všeobecný názov logického písma (Dialog, DialogInput, Monospaced, Serif, SansSerif…) alebo názov konkrétneho písma (Times New Roman, Arial…)veľkosť– veľkosť písma v bodoch (hodnota je zaokrúhlená na typfloat)- Návratová hodnota:
- objekt typu
Písmourčujúci nový typ písma robota - Pozri tiež:
písmoDoma(),písmoDoma(Font),zachovajPísmoDoma(),písmo(String, double)
-
zachovajPísmoDoma
public void zachovajPísmoDoma()
Po použití tejto metódy nebude písmo robota pri použití niektorej modifikácie metódy
domovovplyvňovaná.- Pozri tiež:
písmoDoma(),písmoDoma(Font),písmoDoma(String, double)
-
zachovajPismoDoma
public void zachovajPismoDoma()
Alias pre zachovajPísmoDoma.
-
spôsobKreslenia
public int spôsobKreslenia()
Číta spôsob kreslenia obrázkov
a písania textov (resp. „kreslenia“ textov) aktuálnym
robotom.- Návratová hodnota:
- spôsob kreslenia, čo môže byť buď hodnota
Konštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ - Pozri tiež:
text(String),obrázok(String)
-
sposobKreslenia
public int sposobKreslenia()
Alias pre spôsobKreslenia.
-
spôsobKreslenia
public void spôsobKreslenia(int novýSpôsobKreslenia)
Zmení spôsob kreslenia obrázkov
a písania textov (resp. „kreslenia“ textov) aktuálnym
robotom.- Parametre:
novýSpôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.- Pozri tiež:
text(String),obrázok(String)
-
sposobKreslenia
public void sposobKreslenia(int novýSpôsobKreslenia)
Alias pre spôsobKreslenia.
-
meno
public void meno(String novéMeno)
Pomenuje alebo zruší meno tohto
robota. Meno robota je používané pri zápise a obnove
vlastností robota pomocou konfiguračného súboru
a interaktívnym režimom.Zadané meno musí byť unikátne, nesmie byť prázdne ani rezervované, nesmie sa začínať bodkočiarkou, začínať ani končiť bodkou a nesmie obsahovať znak rovná sa. Na zrušenie mena tohto robota treba zavolať túto metódu s argumentom
null.Rezervované mená sú:
"svet","podlaha","strop"a"robot". Posledné pomenovanie je rezervované pre hlavný robot. Pri ňom jedinom toto meno nespôsobí vznik výnimkyGRobotExceptionohlasujúcej zadanie nesprávneho (rezervovaného) mena a pre neho je zároveň tento reťazec ekvivalentný zrušeniu mena robota zadaním hodnotynull. (To znamená, že aj hlavný robot môže mať vlastné unikátne meno, ale v prípade priradenia predvoleného mena je jeho pomenovanie fiktívne. To znamená, že ak by náhodou svoje privilégium hlavný robot z nejakého dôvodu stratil, tak sa z neho automaticky stane nepomenovaný robot.)- Parametre:
novéMeno– nového meno robota alebonullna zrušenie mena tohto robota- Výnimky:
GRobotException– ak zadané meno nespĺňa niektorú požiadavku
-
meno
public String meno()
Vráti meno robota alebo
nullak robot nemá meno. Ak ide o hlavný robot, ktorý nebol pomenovaný (to znamená, že jeho meno nebolo zmenené), tak metóda vráti rezervované meno"robot".- Návratová hodnota:
- vráti meno robota alebo
null(ak robot nemá meno a nejde o hlavný robot) - Pozri tiež:
meno(String)
-
registrujVKonfigurácii
public void registrujVKonfigurácii()
Zaregistruje tento robot v konfigurácii sveta. To znamená, že po ukončení aplikácie budú údaje o tomto robote automaticky uložené do konfigurácie sveta. Táto metóda by mala byť vykonaná pri spustení aplikácie, pretože jej vykonanie zároveň prečíta a použije údaje o robote z konfiguračného súboru. Ak tento robot nie je hlavným robotom, tak musí mať definované meno, inak vznikne výnimka. Ďalšie informácie môžete nájsť pri ekvivalentnej metóde sveta
registrujRobot(robot).
-
registrujVKonfiguracii
public void registrujVKonfiguracii()
Alias pre registrujVKonfigurácii.
-
registrujVKonfigurácii
public void registrujVKonfigurácii(String novéMeno)
Zaregistruje tento robot v konfigurácii sveta pod novým menom. To znamená, že po ukončení aplikácie budú údaje o tomto robote automaticky uložené do konfigurácie sveta. Táto metóda by mala byť vykonaná pri spustení aplikácie, pretože jej vykonanie zároveň prečíta a použije údaje o robote z konfiguračného súboru. Ak tento robot nie je hlavným robotom, tak musí mať definované meno (pričom zadané meno nesmie mať hodnotu
null), inak vznikne výnimka. Ďalšie informácie môžete nájsť pri úzko súvisiacej metóde svetaregistrujRobot(robot).- Parametre:
novéMeno– nové meno robota- Pozri tiež:
Svet.registrujRobot(GRobot),Svet.dajRobot(String),registrujVKonfigurácii(),jeRegistrovaný()
-
registrujVKonfiguracii
public void registrujVKonfiguracii(String novéMeno)
Alias pre registrujVKonfigurácii.
-
jeRegistrovaný
public boolean jeRegistrovaný()
Overí, či je tento robot registrovaný v konfigurácii sveta.
- Návratová hodnota:
trueak je robot registrovaný v konfigurácii sveta, inakfalse- Pozri tiež:
Svet.registrujRobot(GRobot),Svet.dajRobot(String),registrujVKonfigurácii(),registrujVKonfigurácii(String)
-
jeRegistrovany
public boolean jeRegistrovany()
Alias pre jeRegistrovaný.
-
čítajZoSúboru
public void čítajZoSúboru(Súbor súbor) throws IOException
Prečíta vlastnosti robota zo zadaného súboru. Robot musí mať meno (okrem hlavného robota, ktorému je v prípade nepriradenia žiadneho mena automaticky priradené meno
robot) a súbor musí byť otvorený na čítanie. Metóda je používaná automatickou konfiguráciou sveta. (Ďalšie informácie súvisiace s ukladaním údajov robota sú v opise metódyuložDoSúboru(súbor).)- Parametre:
súbor– inštancia triedy súbor otvorená na čítanie- Výnimky:
IOException– ak vznikla chyba vo vstupno-výstupnej operáciiGRobotException– ak robot nemá meno- Pozri tiež:
ObsluhaUdalostí.konfiguráciaZmenená(),Svet.použiKonfiguráciu(),Svet.registrujRobot(GRobot, String),uložDoSúboru(Súbor)
-
citajZoSuboru
public void citajZoSuboru(Súbor súbor) throws IOException
Alias pre čítajZoSúboru.- Výnimky:
IOException
-
prečítajZoSúboru
public void prečítajZoSúboru(Súbor súbor) throws IOException
Alias pre čítajZoSúboru.- Výnimky:
IOException
-
precitajZoSuboru
public void precitajZoSuboru(Súbor súbor) throws IOException
Alias pre čítajZoSúboru.- Výnimky:
IOException
-
uložDoSúboru
public void uložDoSúboru(Súbor súbor) throws IOException
Uloží vlastnosti robota do zadaného súboru. Robot musí mať meno (okrem hlavného robota, ktorému je v prípade nepriradenia žiadneho mena automaticky priradené meno
robot) a súbor musí byť otvorený na zápis. Metóda je používaná automatickou konfiguráciou sveta. Do konfigurácie je zapísaných mnoho vlastností robota súvisiacich s jeho vzhľadom a aktivitou. Nie sú ukladané napríklad: spojnice, nastavenia kreslenia vlastného tvaru robota, nastavenie kreslenia do obrázka, záloha plátna, záznam cesty, ani zamestnanosť pre potreby obrázkov.- Parametre:
súbor– inštancia triedy súbor otvorená na zápis- Výnimky:
IOException– ak vznikla chyba vo vstupno-výstupnej operáciiGRobotException– ak robot nemá meno- Pozri tiež:
ObsluhaUdalostí.konfiguráciaZmenená(),Svet.použiKonfiguráciu(),Svet.registrujRobot(GRobot, String),čítajZoSúboru(Súbor)
-
ulozDoSuboru
public void ulozDoSuboru(Súbor súbor) throws IOException
Alias pre uložDoSúboru.- Výnimky:
IOException
-
dopredu
public void dopredu(double dĺžka)
Prikáže robotu, aby sa posunul dopredu o zadanú dĺžku v aktuálnom smere. Keď je pero položené, tak kreslí čiaru. Opakom je metóda
vzad.Poznámka: V pôvodnom jazyku Logo (v anglickej verzii) sú ku každému príkazu pohybu korytnačky (z toho pochádza termín „korytnačia grafika“; korytnačku v tomto rámci nahrádza grafický robot) definované jeho dvojpísmenové skratky (fd – forward – dopredu; bk – backward – vzad; rt – right – vpravo; lt – left – vľavo). Pri preklade Loga do slovenčiny vznikali rôzne nejednoznačnosti, ktoré autori vyriešili ustálením nasledujúcich tvarov príkazov pohybu korytnačky: dopredu, vzad, vpravo a vľavo, ku ktorým prislúchajú skratky príkazov do, vz, vp a vľ. Ak chceme dodržať pravidlo vytvorenia skratky z prvých dvoch písmen, tak v slovenskom jazyku nenájdeme iné jednoznačné priradenie. V jazyku Java je však slovo
dorezervované. Preto v programovacom rámci GRobot nemôžu byť skratky pre tieto príkazy definované. Rozhodli sme sa aspoň definovať všetky aliasy príkazov pohybu: vpred, doprava, doľava a dozadu.- Parametre:
dĺžka– vzdialenosť, o ktorú sa má robot posunúť- Pozri tiež:
dopredu (bez zadania dĺžky),(vpred),vzad,(dozadu),vpravo,(doprava),vľavo,(doľava),choďNa,skočNa,choďPoOblúku,skočPoOblúku,zdvihniPero,položPero
-
vpred
public void vpred(double dĺžka)
Alias pre dopredu.
-
vzad
public void vzad(double dĺžka)
Prikáže robotu, aby cúvol z aktuálneho miesta o zadanú dĺžku (v aktuálnom smere). Keď je pero položené, tak kreslí čiaru. Opakom je metóda
dopredu.Poznámka: V pôvodnom jazyku Logo (v anglickej verzii) sú ku každému príkazu pohybu korytnačky (z toho pochádza termín „korytnačia grafika“; korytnačku v tomto rámci nahrádza grafický robot) definované jeho dvojpísmenové skratky (fd – forward – dopredu; bk – backward – vzad; rt – right – vpravo; lt – left – vľavo). Pri preklade Loga do slovenčiny vznikali rôzne nejednoznačnosti, ktoré autori vyriešili ustálením nasledujúcich tvarov príkazov pohybu korytnačky: dopredu, vzad, vpravo a vľavo, ku ktorým prislúchajú skratky príkazov do, vz, vp a vľ. Ak chceme dodržať pravidlo vytvorenia skratky z prvých dvoch písmen, tak v slovenskom jazyku nenájdeme iné jednoznačné priradenie. V jazyku Java je však slovo
dorezervované. Preto v programovacom rámci GRobot nemôžu byť skratky pre tieto príkazy definované. Rozhodli sme sa aspoň definovať všetky aliasy príkazov pohybu: vpred, doprava, doľava a dozadu.- Parametre:
dĺžka– vzdialenosť, o ktorú sa má robot posunúť- Pozri tiež:
vzad (bez zadania dĺžky),dopredu,(vpred),(dozadu),vpravo,(doprava),vľavo,(doľava),choďNa,skočNa,choďPoOblúku,skočPoOblúku,zdvihniPero,položPero
-
dozadu
public void dozadu(double dĺžka)
Alias pre vzad.
-
vpravo
public void vpravo(double uhol)
Prikáže robotu, aby sa obrátil o zadaný uhol v smere hodinových ručičiek. Opakom je metóda
vľavo.Poznámka: V pôvodnom jazyku Logo (v anglickej verzii) sú ku každému príkazu pohybu korytnačky (z toho pochádza termín „korytnačia grafika“; korytnačku v tomto rámci nahrádza grafický robot) definované jeho dvojpísmenové skratky (fd – forward – dopredu; bk – backward – vzad; rt – right – vpravo; lt – left – vľavo). Pri preklade Loga do slovenčiny vznikali rôzne nejednoznačnosti, ktoré autori vyriešili ustálením nasledujúcich tvarov príkazov pohybu korytnačky: dopredu, vzad, vpravo a vľavo, ku ktorým prislúchajú skratky príkazov do, vz, vp a vľ. Ak chceme dodržať pravidlo vytvorenia skratky z prvých dvoch písmen, tak v slovenskom jazyku nenájdeme iné jednoznačné priradenie. V jazyku Java je však slovo
dorezervované. Preto v programovacom rámci GRobot nemôžu byť skratky pre tieto príkazy definované. Rozhodli sme sa aspoň definovať všetky aliasy príkazov pohybu: vpred, doprava, doľava a dozadu.- Parametre:
uhol– uhol, o ktorý sa má robot otočiť- Pozri tiež:
vpravo (bez zadania uhla),dopredu,(vpred),vzad,(dozadu),(doprava),vľavo,(doľava),otočNa(double, double),choďPoOblúku,skočPoOblúku
-
doprava
public void doprava(double uhol)
Alias pre vpravo.
-
vľavo
public void vľavo(double uhol)
Prikáže robotu, aby sa obrátil o zadaný uhol proti smeru hodinových ručičiek. Opakom je metóda
vpravo.Poznámka: V pôvodnom jazyku Logo (v anglickej verzii) sú ku každému príkazu pohybu korytnačky (z toho pochádza termín „korytnačia grafika“; korytnačku v tomto rámci nahrádza grafický robot) definované jeho dvojpísmenové skratky (fd – forward – dopredu; bk – backward – vzad; rt – right – vpravo; lt – left – vľavo). Pri preklade Loga do slovenčiny vznikali rôzne nejednoznačnosti, ktoré autori vyriešili ustálením nasledujúcich tvarov príkazov pohybu korytnačky: dopredu, vzad, vpravo a vľavo, ku ktorým prislúchajú skratky príkazov do, vz, vp a vľ. Ak chceme dodržať pravidlo vytvorenia skratky z prvých dvoch písmen, tak v slovenskom jazyku nenájdeme iné jednoznačné priradenie. V jazyku Java je však slovo
dorezervované. Preto v programovacom rámci GRobot nemôžu byť skratky pre tieto príkazy definované. Rozhodli sme sa aspoň definovať všetky aliasy príkazov pohybu: vpred, doprava, doľava a dozadu.- Parametre:
uhol– uhol, o ktorý sa má robot otočiť- Pozri tiež:
vľavo (bez zadania uhla),dopredu,(vpred),vzad,(dozadu),vpravo,(doprava),(doľava),otočNa(double, double),choďPoOblúku,skočPoOblúku
-
vlavo
public void vlavo(double uhol)
Alias pre vľavo.
-
doľava
public void doľava(double uhol)
Alias pre vľavo.
-
dolava
public void dolava(double uhol)
Alias pre doľava.
-
dopredu
public void dopredu()
Prikáže robotu, aby sa posunul v aktuálnom smere dopredu o hodnotu svojej veľkosti. Keď je pero položené, tak kreslí čiaru. Opakom je metóda
vzad. (Pozri aj metódudopredu(dĺžka).)Poznámka: Cieľom tejto metódy je zjednodušiť pohyb robota v interaktívnom režime, kde fungujú aj skratky základných príkazov na pohyb: dopredu –
do, vzad –vz, vpravo –vpa vľavo –vľ/vl. Samozrejme, že jej použitiu nič nebráni ani pri „klasickom“ programovaní s použitím programovacieho rámca GRobot.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Pozri tiež:
dopredu(dĺžka),(vpred),vzad,(dozadu),vpravo,(doprava),vľavo,(doľava),zdvihniPero,položPero
-
vpred
public void vpred()
Alias pre dopredu.
-
vzad
public void vzad()
Prikáže robotu, aby cúvol z aktuálneho miesta o hodnotu svojej veľkosti (v aktuálnom smere). Keď je pero položené, tak kreslí čiaru. Opakom je metóda
dopredu. (Pozri aj metóduvzad(dĺžka).)Poznámka: Cieľom tejto metódy je zjednodušiť pohyb robota v interaktívnom režime, kde fungujú aj skratky základných príkazov na pohyb: dopredu –
do, vzad –vz, vpravo –vpa vľavo –vľ/vl. Samozrejme, že jej použitiu nič nebráni ani pri „klasickom“ programovaní s použitím programovacieho rámca GRobot.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Pozri tiež:
vzad(dĺžka),dopredu,(vpred),(dozadu),vpravo,(doprava),vľavo,(doľava),zdvihniPero,položPero
-
dozadu
public void dozadu()
Alias pre vzad.
-
vpravo
public void vpravo()
Prikáže robotu, aby sa obrátil o uhol otáčania (predvolene 45° – s ohľadom na definície hodnôt konštát v rozhraní
Smer) v smere hodinových ručičiek. Opakom je metódavľavo. (Pozri aj metóduvpravo(uhol).)Poznámka: Cieľom tejto metódy je zjednodušiť pohyb robota v interaktívnom režime, kde fungujú aj skratky základných príkazov na pohyb: dopredu –
do, vzad –vz, vpravo –vpa vľavo –vľ/vl. Samozrejme, že jej použitiu nič nebráni ani pri „klasickom“ programovaní s použitím programovacieho rámca GRobot.- Pozri tiež:
vpravo(uhol),uholOtáčania(uhol),dopredu,(vpred),vzad,(dozadu),(doprava),vľavo,(doľava)
-
doprava
public void doprava()
Alias pre vpravo.
-
vľavo
public void vľavo()
Prikáže robotu, aby sa obrátil o uhol otáčania (predvolene 45° – s ohľadom na definície hodnôt konštát v rozhraní
Smer) proti smeru hodinových ručičiek. Opakom je metódavpravo. (Pozri aj metóduvľavo(uhol).)Poznámka: Cieľom tejto metódy je zjednodušiť pohyb robota v interaktívnom režime, kde fungujú aj skratky základných príkazov na pohyb: dopredu –
do, vzad –vz, vpravo –vpa vľavo –vľ/vl. Samozrejme, že jej použitiu nič nebráni ani pri „klasickom“ programovaní s použitím programovacieho rámca GRobot.- Pozri tiež:
vľavo(uhol),uholOtáčania(uhol),dopredu,(vpred),vzad,(dozadu),vpravo,(doprava),(doľava)
-
vlavo
public void vlavo()
Alias pre vľavo.
-
doľava
public void doľava()
Alias pre vľavo.
-
dolava
public void dolava()
Alias pre doľava.
-
skoč
public void skoč(double dĺžka)
Prikáže robotu, aby preskočil dopredu o zadanú dĺžku v aktuálnom smere. Robot pri skákaní nekreslí čiaru. Opakom je metóda
odskoč. (Pozri aj metóduskoč().)- Parametre:
dĺžka– vzdialenosť, o ktorú má robot preskočiť- Pozri tiež:
dopredu
-
skoc
public void skoc(double dĺžka)
Alias pre skoč.
-
odskoč
public void odskoč(double dĺžka)
Prikáže robotu, aby skokom cúvol z aktuálneho miesta o zadanú dĺžku (v aktuálnom smere). Robot pri skákaní nekreslí čiaru. Opakom je metóda
skoč. (Pozri aj metóduodskoč().)- Parametre:
dĺžka– vzdialenosť, o ktorú má robot preskočiť- Pozri tiež:
vzad
-
odskoc
public void odskoc(double dĺžka)
Alias pre odskoč.
-
skoč
public void skoč()
Prikáže robotu, aby preskočil v aktuálnom smere dopredu o hodnotu svojej veľkosti. Robot pri skákaní nekreslí čiaru. Opakom je metóda
odskoč. (Pozri aj metóduskoč(dĺžka).)Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Pozri tiež:
dopredu
-
skoc
public void skoc()
Alias pre skoč.
-
odskoč
public void odskoč()
Prikáže robotu, aby skokom cúvol z aktuálneho miesta o hodnotu svojej veľkosti (v aktuálnom smere). Robot pri skákaní nekreslí čiaru. Opakom je metóda
skoč. (Pozri aj metóduodskoč(dĺžka).)Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Pozri tiež:
vzad
-
odskoc
public void odskoc()
Alias pre odskoč.
-
otočO
public void otočO(double uhol)
Otočí robot o zadaný uhol (proti smeru hodinových ručičiek). Má rovnaký efekt, ako keby sme volali metódu
vľavo.- Parametre:
uhol– uhol, o ktorý sa má robot otočiť- Pozri tiež:
otoč(double),otočO(double, double)
-
otocO
public void otocO(double uhol)
Alias pre otočO.
-
otočO
public void otočO(double uhol, double najviacO)Otočí robot o zadaný uhol s kontrolou maximálneho dovoleného uhla pootočenia. Volanie tejto metódy má zmysel v prípade použitia premennej, ktorej hodnotu chceme obmedziť. Ak je absolútna hodnota uhla väčia ako absolútna hodnota obmedzenia (parametrom
najviacO), tak je hodnota uhla otáčania „orezaná“ (nastavená na hodnotunajviacOso zachovaním znamienka, ktoré určuje smer otáčania).Kladná hodnota uhla otáčania značí otáčanie proti smeru hodinových ručičiek. Znamienko hodnoty obmedzenia je ignorované.
Porovnaj s metódu
otočO.- Parametre:
uhol– uhol, o ktorý sa má robot otočiťnajviacO– obmedzenie učujúce maximálnu povolenú hodnota uhla otáčania- Pozri tiež:
otočO(double)
-
otocO
public void otocO(double uhol, double najviacO) Alias pre otočO.
-
posuňVpravo
public void posuňVpravo(double dĺžka)
Prikáže robotu, aby sa posunul vpravo o zadanú dĺžku (vzhľadom na aktuálnu orientáciu). Robot zostane obrátený tam, kam bol. Keď je pero položené, tak kreslí čiaru. Protikladom je metóda
posuňVľavo.- Parametre:
dĺžka– vzdialenosť, o ktorú sa má robot posunúť
-
posunVpravo
public void posunVpravo(double dĺžka)
Alias pre posuňVpravo.
-
posuňDoprava
public void posuňDoprava(double dĺžka)
Alias pre posuňVpravo.
-
posunDoprava
public void posunDoprava(double dĺžka)
Alias pre posuňDoprava.
-
posuňVľavo
public void posuňVľavo(double dĺžka)
Prikáže robotu, aby sa posunul vľavo o zadanú dĺžku (vzhľadom na aktuálnu orientáciu). Robot zostane obrátený tam, kam bol. Keď je pero položené, tak kreslí čiaru. Protikladom je metóda
posuňVpravo.- Parametre:
dĺžka– vzdialenosť, o ktorú sa má robot posunúť
-
posunVlavo
public void posunVlavo(double dĺžka)
Alias pre posuňVľavo.
-
posuňDoľava
public void posuňDoľava(double dĺžka)
Alias pre posuňVľavo.
-
posunDolava
public void posunDolava(double dĺžka)
Alias pre posuňDoľava.
-
posuňVpravo
public void posuňVpravo()
Prikáže robotu, aby sa posunul vpravo o hodnotu svojej veľkosti násobenej pomerom (vzhľadom na aktuálnu orientáciu). Robot zostane obrátený tam, kam bol. Keď je pero položené, tak kreslí čiaru. Protikladom je metóda
posuňVľavo.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
-
posunVpravo
public void posunVpravo()
Alias pre posuňVpravo.
-
posuňDoprava
public void posuňDoprava()
Alias pre posuňVpravo.
-
posunDoprava
public void posunDoprava()
Alias pre posuňDoprava.
-
posuňVľavo
public void posuňVľavo()
Prikáže robotu, aby sa posunul vľavo o hodnotu svojej veľkosti násobenej pomerom (vzhľadom na aktuálnu orientáciu). Robot zostane obrátený tam, kam bol. Keď je pero položené, tak kreslí čiaru. Protikladom je metóda
posuňVpravo.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
-
posunVlavo
public void posunVlavo()
Alias pre posuňVľavo.
-
posuňDoľava
public void posuňDoľava()
Alias pre posuňVľavo.
-
posunDolava
public void posunDolava()
Alias pre posuňDoľava.
-
posuňVSmere
public void posuňVSmere(double smer, double dĺžka)Prikáže robotu, aby sa posunul v zadanom smere o zadanú dĺžku. Robot zostane obrátený tam, kam bol. Keď je pero položené, tak kreslí čiaru.
- Parametre:
smer– uhol smeru, ktorým sa má robot posunúťdĺžka– vzdialenosť, o ktorú sa má robot posunúť- Pozri tiež:
preskočVSmere(double, double),posuňVSmere(Smer, double),preskočVSmere(Smer, double),posuňVSmere(double),preskočVSmere(double),posuňVSmere(Smer),preskočVSmere(Smer),posuň(double, double),preskoč(double, double)
-
posunVSmere
public void posunVSmere(double smer, double dĺžka) Alias pre posuňVSmere.
-
posuňVSmere
public void posuňVSmere(double smer)
Prikáže robotu, aby sa posunul v zadanom smere o hodnotu svojej veľkosti. Robot zostane obrátený tam, kam bol. Keď je pero položené, tak kreslí čiaru.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
smer– uhol smeru, ktorým sa má robot posunúť- Pozri tiež:
posuňVSmere(double, double),preskočVSmere(double, double),posuňVSmere(Smer, double),preskočVSmere(Smer, double),preskočVSmere(double),posuňVSmere(Smer),preskočVSmere(Smer),posuň(double, double),preskoč(double, double)
-
posunVSmere
public void posunVSmere(double smer)
Alias pre posuňVSmere.
-
posuňVSmere
public void posuňVSmere(Smer smer, double dĺžka)
Prikáže robotu, aby sa posunul v zadanom smere o zadanú dĺžku. Robot zostane obrátený tam, kam bol. Keď je pero položené, tak kreslí čiaru.
- Parametre:
smer– inštancia určujúca smer, ktorým sa má robot posunúťdĺžka– vzdialenosť, o ktorú sa má robot posunúť- Pozri tiež:
posuňVSmere(double, double),preskočVSmere(double, double),preskočVSmere(Smer, double),posuňVSmere(double),preskočVSmere(double),posuňVSmere(Smer),preskočVSmere(Smer),posuň(double, double),preskoč(double, double)
-
posunVSmere
public void posunVSmere(Smer smer, double dĺžka)
Alias pre posuňVSmere.
-
posuňVSmere
public void posuňVSmere(Smer smer)
Prikáže robotu, aby sa posunul v zadanom smere o hodnotu svojej veľkosti. Robot zostane obrátený tam, kam bol. Keď je pero položené, tak kreslí čiaru.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
smer– inštancia určujúca smer, ktorým sa má robot posunúť- Pozri tiež:
posuňVSmere(double, double),preskočVSmere(double, double),posuňVSmere(Smer, double),preskočVSmere(Smer, double),posuňVSmere(double),preskočVSmere(double),preskočVSmere(Smer),posuň(double, double),preskoč(double, double)
-
posunVSmere
public void posunVSmere(Smer smer)
Alias pre posuňVSmere.
-
preskočVpravo
public void preskočVpravo(double dĺžka)
Prikáže robotu, aby preskočil vpravo o zadanú dĺžku (vzhľadom na aktuálnu orientáciu). Robot zostane obrátený tam, kam bol a pri skákaní nekreslí čiaru. Protikladom je metóda
preskočVľavo.- Parametre:
dĺžka– vzdialenosť, o ktorú má robot preskočiť
-
preskocVpravo
public void preskocVpravo(double dĺžka)
Alias pre preskočVpravo.
-
preskočDoprava
public void preskočDoprava(double dĺžka)
Alias pre preskočVpravo.
-
preskocDoprava
public void preskocDoprava(double dĺžka)
Alias pre preskočDoprava.
-
preskočVľavo
public void preskočVľavo(double dĺžka)
Prikáže robotu, aby preskočil vľavo o zadanú dĺžku (vzhľadom na aktuálnu orientáciu). Robot zostane obrátený tam, kam bol a pri skákaní nekreslí čiaru. Protikladom je metóda
preskočVpravo.- Parametre:
dĺžka– vzdialenosť, o ktorú má robot preskočiť
-
preskocVlavo
public void preskocVlavo(double dĺžka)
Alias pre preskočVľavo.
-
preskočDoľava
public void preskočDoľava(double dĺžka)
Alias pre preskočVľavo.
-
preskocDolava
public void preskocDolava(double dĺžka)
Alias pre preskočDoľava.
-
preskočVpravo
public void preskočVpravo()
Prikáže robotu, aby preskočil vpravo o hodnotu svojej veľkosti násobenej pomerom (vzhľadom na aktuálnu orientáciu). Robot zostane obrátený tam, kam bol a pri skákaní nekreslí čiaru. Protikladom je metóda
preskočVľavo.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
-
preskocVpravo
public void preskocVpravo()
Alias pre preskočVpravo.
-
preskočDoprava
public void preskočDoprava()
Alias pre preskočVpravo.
-
preskocDoprava
public void preskocDoprava()
Alias pre preskočDoprava.
-
preskočVľavo
public void preskočVľavo()
Prikáže robotu, aby preskočil vľavo o hodnotu svojej veľkosti násobenej pomerom (vzhľadom na aktuálnu orientáciu). Robot zostane obrátený tam, kam bol a pri skákaní nekreslí čiaru. Protikladom je metóda
preskočVpravo.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
-
preskocVlavo
public void preskocVlavo()
Alias pre preskočVľavo.
-
preskočDoľava
public void preskočDoľava()
Alias pre preskočVľavo.
-
preskocDolava
public void preskocDolava()
Alias pre preskočDoľava.
-
preskočVSmere
public void preskočVSmere(double smer, double dĺžka)Prikáže robotu, aby preskočil v zadanom smere o zadanú dĺžku. Robot zostane obrátený tam, kam bol a pri skákaní nekreslí čiaru.
- Parametre:
smer– uhol smeru, ktorým má robot skočiťdĺžka– vzdialenosť, o ktorú má robot preskočiť- Pozri tiež:
posuňVSmere(double, double),posuňVSmere(Smer, double),preskočVSmere(Smer, double),posuňVSmere(double),preskočVSmere(double),posuňVSmere(Smer),preskočVSmere(Smer),posuň(double, double),preskoč(double, double)
-
preskocVSmere
public void preskocVSmere(double smer, double dĺžka) Alias pre preskočVSmere.
-
preskočVSmere
public void preskočVSmere(double smer)
Prikáže robotu, aby preskočil v zadanom smere o hodnotu svojej veľkosti. Robot zostane obrátený tam, kam bol a pri skákaní nekreslí čiaru.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
smer– uhol smeru, ktorým má robot skočiť- Pozri tiež:
posuňVSmere(double, double),preskočVSmere(double, double),posuňVSmere(Smer, double),preskočVSmere(Smer, double),posuňVSmere(double),preskočVSmere(Smer),posuňVSmere(Smer),posuň(double, double),preskoč(double, double)
-
preskocVSmere
public void preskocVSmere(double smer)
Alias pre preskočVSmere.
-
preskočVSmere
public void preskočVSmere(Smer smer, double dĺžka)
Prikáže robotu, aby preskočil v zadanom smere o zadanú dĺžku. Robot zostane obrátený tam, kam bol a pri skákaní nekreslí čiaru.
- Parametre:
smer– inštancia určujúca smer, ktorým má robot skočiťdĺžka– vzdialenosť, o ktorú má robot preskočiť- Pozri tiež:
posuňVSmere(double, double),preskočVSmere(double, double),posuňVSmere(Smer, double),posuňVSmere(double),preskočVSmere(double),posuňVSmere(Smer),preskočVSmere(Smer),posuň(double, double),preskoč(double, double)
-
preskocVSmere
public void preskocVSmere(Smer smer, double dĺžka)
Alias pre preskočVSmere.
-
preskočVSmere
public void preskočVSmere(Smer smer)
Prikáže robotu, aby preskočil v zadanom smere o hodnotu svojej veľkosti. Robot zostane obrátený tam, kam bol a pri skákaní nekreslí čiaru.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
smer– inštancia určujúca smer, ktorým má robot skočiť- Pozri tiež:
posuňVSmere(double, double),preskočVSmere(double, double),posuňVSmere(Smer, double),preskočVSmere(Smer, double),posuňVSmere(double),preskočVSmere(double),posuňVSmere(Smer),posuň(double, double),preskoč(double, double)
-
preskocVSmere
public void preskocVSmere(Smer smer)
Alias pre preskočVSmere.
-
smerNa
public double smerNa(double x, double y)Zistí smer (uhol) z aktuálneho miesta robota smerom na zadané súradnice [x, y]. Ak sú súradnice bodu zhodné so súradnicami robota, je vrátená hodnota uhla 360.
- Parametre:
x– x-ová súradnica boduy– y-ová súradnica bodu- Návratová hodnota:
- hodnota uhla určujúceho smer od robota k zadanému bodu
- Pozri tiež:
smer(),uhol(),uholNa(double, double),smerNa(Poloha),uholNa(Poloha),smerNa(Shape),uholNa(Shape),smerNaMyš(),uholNaMyš(),smer(double, double),uhol(double, double),otočNa(double, double),otočNa(double, double, double)
-
uholNa
public double uholNa(double x, double y) Alias pre smerNa.
-
smerNa
public double smerNa(Poloha objekt)
Zistí smer (uhol) z aktuálneho miesta robota smerom ku zadanému objektu. Ak sú polohy robota a objektu zhodné, je vrátená hodnota uhla 360. (Cieľový objekt nemusí byť viditeľný.)
- Parametre:
objekt– objekt vzhľadom ku ktorému bude zistená orientácia- Návratová hodnota:
- hodnota uhla určujúceho smer od robota ku zadanému objektu
- Pozri tiež:
smer(),uhol(),smerNa(double, double),uholNa(double, double),uholNa(Poloha),smerNa(Shape),uholNa(Shape),smerNaMyš(),uholNaMyš(),smer(double, double),uhol(double, double),otočNa(double, double),otočNa(Poloha),otočNa(Poloha, double)
-
smerNa
public double smerNa(Shape tvar)
Zistí smer (uhol) z aktuálneho miesta robota smerom do, stredu hraníc[1] zadaného tvaru. Ak je poloha robota zhodná so stredom hraníc tvaru, je vrátená hodnota uhla 360.
[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
- Parametre:
tvar– tvar Javy (Shape), ku stredu hraníc ktorého má byť zistený smer- Návratová hodnota:
- hodnota uhla určujúceho smer od robota ku zadanému tvaru
- Pozri tiež:
smer(),uhol(),smerNa(double, double),uholNa(double, double),smerNa(Poloha),uholNa(Poloha),uholNa(Shape),smerNaMyš(),uholNaMyš(),smer(double, double),uhol(double, double),otočNa(double, double),otočNa(Shape),otočNa(Shape, double)
-
smerNaMyš
public double smerNaMyš()
Zistí smer (uhol) z aktuálneho miesta robota smerom k aktuálnym súradniciam myši. Ak sú súradnice myši zhodné so súradnicami robota, je vrátená hodnota uhla 360.
- Návratová hodnota:
- hodnota uhla určujúceho smer od robota k aktuálnym súradniciam myši
- Pozri tiež:
smer(),uhol(),smerNa(double, double),uholNa(double, double),smerNa(Poloha),uholNa(Poloha),smerNa(Shape),uholNa(Shape),uholNaMyš(),smer(double, double),uhol(double, double),otočNa(double, double),otočNaMyš(),otočNaMyš(double)
-
smerNaMys
public double smerNaMys()
Alias pre smerNaMyš.
-
uholNaMyš
public double uholNaMyš()
Alias pre smerNaMyš.
-
uholNaMys
public double uholNaMys()
Alias pre smerNaMyš.
-
smer
public double smer(double Δx, double Δy)Zistí smer k bodu zadanému pomocou odchýlok súradníc v horizontálnom a vertikáklom smere [Δx, Δy]. Ak sú zadané súradnice [0, 0], metóda vráti hodnotu 360. Efekt je rovnaký, ako keby robot stál v bode [0, 0] a použili by sme s rovnakými hodnotami metódu
smerNa. (Inak povedané – táto metóda pracuje s tzv. relatívnymi súradnicami – súradnicami vztiahnutými k súčasnej polohe robota.)- Parametre:
Δx– odchýlka v smere osi xΔy– odchýlka v smere osi y- Návratová hodnota:
- hodnota uhla určujúceho smer od stredu súradnicovej sústavy k zadanému bodu
- Pozri tiež:
smer(),uhol(),smerNa(double, double),uholNa(double, double),smerNa(Poloha),uholNa(Poloha),smerNa(Shape),uholNa(Shape),smerNaMyš(),uholNaMyš(),uhol(double, double),otočNa(double, double)
-
uhol
public double uhol(double Δx, double Δy) Alias pre smer.
-
otočNa
public void otočNa(double x, double y)Nasmeruje robot smerom na zadané súradnice [x, y] na podlahe (strope). Ak sú súradnice bodu zhodné so súradnicami robota, smer robota sa nezmení. Inak je vypočítaný uhol smeru medzi aktuálnou polohou robota a zadaným bodom, ktorý je použitý na nasmerovanie robota.
- Parametre:
x– x-ová súradnica boduy– y-ová súradnica bodu- Pozri tiež:
smer(),uhol(),smerNa(double, double),uholNa(double, double),smerNa(Poloha),uholNa(Poloha),smerNa(Shape),uholNa(Shape),smerNaMyš(),uholNaMyš(),smer(double, double),uhol(double, double)
-
otocNa
public void otocNa(double x, double y) Alias pre otočNa.
-
otočNa
public void otočNa(double x, double y, double najviacO)Funguje podobne ako metóda
otočNa, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí robot okamžite smerom na zadané súradnice, iba ním pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.- Parametre:
x– x-ová súradnica boduy– y-ová súradnica bodunajviacO– maximálna hodnota uhla, o ktorú sa môže robot otočiť smerom k bodu [x, y]- Pozri tiež:
smerNa(double, double)
-
otocNa
public void otocNa(double x, double y, double najviacO) Alias pre otočNa.
-
otočNa
public void otočNa(Poloha objekt)
Nasmeruje tento robot smerom k zadanému objektu. Ak sú súradnice robota a objektu zhodné, smer robota sa nezmení. Inak je vypočítaný uhol smeru medzi polohou robota a zadaného objektu a ten je použitý na nasmerovanie robota. (Objekt nemusí byť viditeľný.)
- Parametre:
objekt– objekt ku ktorému má byť tento robot nasmerovaný- Pozri tiež:
smerNa(Poloha)
-
otočNa
public void otočNa(Poloha objekt, double najviacO)
Funguje podobne ako metóda
otočNa, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí tento robot okamžite smerom k objektu, iba ho pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.- Parametre:
objekt– objekt ku ktorému má byť tento robot nasmerovanýnajviacO– maximálna hodnota uhla, o ktorú sa môže tento robot otočiť smerom k objektu- Pozri tiež:
smerNa(Poloha)
-
otočNa
public void otočNa(Shape tvar)
Nasmeruje tento robot smerom do stredu hraníc[1] zadaného tvaru. Ak je poloha robota zhodná so stredom hraníc tvaru, smer robota sa nezmení. Inak je vypočítaný uhol smeru medzi polohou aktuálneho robota a stredom hraníc tvaru a výsledok je použitý na nasmerovanie tohto robota.
[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
- Parametre:
tvar– tvar Javy (Shape), do stredu hraníc ktorého má byť robot nasmerovaný- Pozri tiež:
smerNa(Shape)
-
otočNa
public void otočNa(Shape tvar, double najviacO)
Funguje podobne ako metóda
otočNa, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí tento robot okamžite smerom do stredu hraníc[1] tvaru, iba ho pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
- Parametre:
tvar– tvar Javy (Shape), do stredu hraníc ktorého má byť robot nasmerovanýnajviacO– maximálna hodnota uhla, o ktorú sa môže tento robot otočiť smerom do stredu hraníc tvaru- Pozri tiež:
smerNa(Shape)
-
otočNaMyš
public void otočNaMyš()
Nasmeruje robot smerom na aktuálne súradnice myši. Ak sú súradnice myši zhodné so súradnicami robota, smer robota sa nezmení. Inak je vypočítaný uhol smeru medzi aktuálnou polohou robota a polohou myši, ktorý je použitý na nasmerovanie robota.
- Pozri tiež:
smerNaMyš()
-
otocNaMys
public void otocNaMys()
Alias pre otočNaMyš.
-
otočNaMyš
public void otočNaMyš(double najviacO)
Funguje podobne ako metóda
otočNaMyš, ibaže obmedzuje uhol pootočenia – neotočí tento robot okamžite smerom k súradniciam myši, iba ho pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.- Parametre:
najviacO– maximálna hodnota uhla, o ktorú sa môže tento robot otočiť smerom k aktuálnym súradniciam myši- Pozri tiež:
smerNaMyš()
-
otocNaMys
public void otocNaMys(double najviacO)
Alias pre otočNaMyš.
-
otoč
public void otoč(double Δx, double Δy)Nasmeruje robot smerom zadaným pomocou súradníc [Δx, Δy]. Ak je zadané [0, 0], smer robota sa nezmení. Inak je vypočítaný uhol smeru medzi aktuálnou polohou robota a súradnicami zmenenými o hodnoty [Δx, Δy]. Efekt je v podstate rovnaký, ako keby robot stál v bode [0, 0] a použili by sme s rovnakými hodnotami metódu
otočNa. (Inak povedané – táto metóda pracuje s tzv. relatívnymi súradnicami – súradnicami vztiahnutými k súčasnej polohe robota.)- Parametre:
Δx– odchýlka v smere osi xΔy– odchýlka v smere osi y- Pozri tiež:
smer(double),uhol(double),vpravo,vľavo,otočNa(double, double),otoč(double),otoč(double, double),otoč(double, double, double),otočO(double)
-
otoc
public void otoc(double Δx, double Δy) Alias pre otoč.
-
otoč
public void otoč(double Δx, double Δy, double najviacO)Funguje podobne ako metóda
otoč, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí robot okamžite smerom na zadané súradnice, iba ním pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla.- Parametre:
Δx– odchýlka v smere osi xΔy– odchýlka v smere osi ynajviacO– maximálna hodnota uhla, o ktorú sa môže robot otočiť smerom k bodu [Δx, Δy]- Pozri tiež:
otoč(double, double)
-
otoc
public void otoc(double Δx, double Δy, double najviacO) Alias pre otoč.
-
otoč
public void otoč(Smer objekt)
Nasmeruje tento robot rovnakým smerom, akým je otočený zadaný objekt.
- Parametre:
objekt– objekt, podľa ktorého chceme nasmerovať tento robot- Pozri tiež:
otoč(double, double)
-
otoč
public void otoč(Smer objekt, double najviacO)
Funguje podobne ako metóda
otoč, ibaže obmedzuje uhol pootočenia stanoveným smerom – neotočí robot okamžite podľa smeru iného robota, iba ním pootočí o maximálnu zadanú hodnotu uhla.- Parametre:
objekt– objekt, podľa ktorého chceme nasmerovať tento robotnajviacO– maximálna hodnota uhla, o ktorú sa môže robot otočiť
-
choďNaPootočený
public void choďNaPootočený(double x, double y, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota. Príklady: Uhol 0° znamená, že robot sa posunie presne na zadané súradnice. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané súradnice.
- Parametre:
x– x-ová súradnica cieľového boduy– y-ová súradnica cieľového boduuhol– uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
choďNaPootočený(Poloha, double),choďNaPootočený(double, double, Smer),skočNaPootočený(double, double, double),skočNaPootočený(double, double, Smer)
-
chodNaPootoceny
public void chodNaPootoceny(double x, double y, double uhol) Alias pre choďNaPootočený.
-
choďNaPootočený
public void choďNaPootočený(double x, double y, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota. Príklady: Uhol 0° znamená, že robot sa posunie presne na zadané súradnice. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané súradnice.
- Parametre:
x– x-ová súradnica cieľového boduy– y-ová súradnica cieľového bodusmer– objekt určujúci uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
choďNaPootočený(Poloha, Smer),choďNaPootočený(double, double, double),skočNaPootočený(double, double, double),skočNaPootočený(double, double, Smer)
-
chodNaPootoceny
public void chodNaPootoceny(double x, double y, Smer smer) Alias pre choďNaPootočený.
-
skočNaPootočený
public void skočNaPootočený(double x, double y, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota. Príklady: Uhol 0° znamená, že robot sa posunie presne na zadané súradnice. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané súradnice.
- Parametre:
x– x-ová súradnica cieľového boduy– y-ová súradnica cieľového boduuhol– uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
skočNaPootočený(Poloha, double),choďNaPootočený(double, double, double),choďNaPootočený(double, double, Smer),skočNaPootočený(double, double, Smer)
-
skocNaPootoceny
public void skocNaPootoceny(double x, double y, double uhol) Alias pre skočNaPootočený.
-
skočNaPootočený
public void skočNaPootočený(double x, double y, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota. Príklady: Uhol 0° znamená, že robot sa posunie presne na zadané súradnice. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané súradnice.
- Parametre:
x– x-ová súradnica cieľového boduy– y-ová súradnica cieľového bodusmer– objekt určujúci uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
skočNaPootočený(Poloha, Smer),choďNaPootočený(double, double, double),choďNaPootočený(double, double, Smer),skočNaPootočený(double, double, double)
-
skocNaPootoceny
public void skocNaPootoceny(double x, double y, Smer smer) Alias pre skočNaPootočený.
-
choďNaPootočený
public void choďNaPootočený(Poloha poloha, double uhol)
Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota. Príklady: Uhol 0° znamená, že robot sa posunie presne na zadané súradnice. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané súradnice.
- Parametre:
poloha– objekt určujúci cieľový boduhol– uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
choďNaPootočený(double, double, double),choďNaPootočený(Poloha, Smer),skočNaPootočený(Poloha, double),skočNaPootočený(Poloha, Smer)
-
chodNaPootoceny
public void chodNaPootoceny(Poloha poloha, double uhol)
Alias pre choďNaPootočený.
-
choďNaPootočený
public void choďNaPootočený(Poloha poloha, Smer smer)
Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota. Príklady: Uhol 0° znamená, že robot sa posunie presne na zadané súradnice. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané súradnice.
- Parametre:
poloha– objekt určujúci cieľový bodsmer– objekt určujúci uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
choďNaPootočený(double, double, Smer),choďNaPootočený(Poloha, double),skočNaPootočený(Poloha, double),skočNaPootočený(Poloha, Smer)
-
chodNaPootoceny
public void chodNaPootoceny(Poloha poloha, Smer smer)
Alias pre choďNaPootočený.
-
skočNaPootočený
public void skočNaPootočený(Poloha poloha, double uhol)
Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota. Príklady: Uhol 0° znamená, že robot sa posunie presne na zadané súradnice. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané súradnice.
- Parametre:
poloha– objekt určujúci cieľový boduhol– uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
skočNaPootočený(double, double, double),choďNaPootočený(Poloha, double),choďNaPootočený(Poloha, Smer),skočNaPootočený(Poloha, Smer)
-
skocNaPootoceny
public void skocNaPootoceny(Poloha poloha, double uhol)
Alias pre skočNaPootočený.
-
skočNaPootočený
public void skočNaPootočený(Poloha poloha, Smer smer)
Tento príkaz pošle robot na miesto určené pootočením zadaných súradníc o zadaný uhol so stredom otáčania v mieste robota. Príklady: Uhol 0° znamená, že robot sa posunie presne na zadané súradnice. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané súradnice.
- Parametre:
poloha– objekt určujúci cieľový bodsmer– objekt určujúci uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
skočNaPootočený(double, double, Smer),choďNaPootočený(Poloha, double),choďNaPootočený(Poloha, Smer),skočNaPootočený(Poloha, double)
-
skocNaPootoceny
public void skocNaPootoceny(Poloha poloha, Smer smer)
Alias pre skočNaPootočený.
-
choďPootočený
public void choďPootočený(double Δx, double Δy, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných relatívnych súradníc o zadaný uhol. Príklady: Uhol 0° znamená, že robot sa posunie presne o zadané súradnice v smere osí x a y. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané relatívne súradnice.
- Parametre:
Δx– zmena súradníc v osi xΔy– zmena súradníc v osi yuhol– uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
choďPootočený(double, double, Smer),skočPootočený(double, double, double),skočPootočený(double, double, Smer)
-
chodPootoceny
public void chodPootoceny(double Δx, double Δy, double uhol) Alias pre choďPootočený.
-
choďPootočený
public void choďPootočený(double Δx, double Δy, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných relatívnych súradníc o zadaný uhol. Príklady: Uhol 0° znamená, že robot sa posunie presne o zadané súradnice v smere osí x a y. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané relatívne súradnice.
- Parametre:
Δx– zmena súradníc v osi xΔy– zmena súradníc v osi ysmer– objekt určujúci uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
choďPootočený(double, double, double),skočPootočený(double, double, double),skočPootočený(double, double, Smer)
-
chodPootoceny
public void chodPootoceny(double Δx, double Δy, Smer smer) Alias pre choďPootočený.
-
skočPootočený
public void skočPootočený(double Δx, double Δy, double uhol)Tento príkaz pošle robot na miesto určené pootočením zadaných relatívnych súradníc o zadaný uhol. Príklady: Uhol 0° znamená, že robot sa posunie presne o zadané súradnice v smere osí x a y. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané relatívne súradnice.
- Parametre:
Δx– zmena súradníc v osi xΔy– zmena súradníc v osi yuhol– uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
choďPootočený(double, double, double),choďPootočený(double, double, Smer),skočPootočený(double, double, Smer)
-
skocPootoceny
public void skocPootoceny(double Δx, double Δy, double uhol) Alias pre skočPootočený.
-
skočPootočený
public void skočPootočený(double Δx, double Δy, Smer smer)Tento príkaz pošle robot na miesto určené pootočením zadaných relatívnych súradníc o zadaný uhol. Príklady: Uhol 0° znamená, že robot sa posunie presne o zadané súradnice v smere osí x a y. Uhol 180° znamená, že robot sa pohne presne opačným smerom než sa nachádzajú zadané relatívne súradnice.
- Parametre:
Δx– zmena súradníc v osi xΔy– zmena súradníc v osi ysmer– objekt určujúci uhol pootočenia výsledného pohybu voči cieľu- Pozri tiež:
choďPootočený(double, double, double),choďPootočený(double, double, Smer),skočPootočený(double, double, double)
-
skocPootoceny
public void skocPootoceny(double Δx, double Δy, Smer smer) Alias pre skočPootočený.
-
choďNa
public void choďNa(double novéX, double novéY)Prikáže robotu, aby prešiel na konkrétne súradnice na podlahe (strope). Keď je pero položené, tak kreslí čiaru. Robot nezmení smer, kam bol obrátený.
- Parametre:
novéX– nová x-ová súradnicanovéY– nová y-ová súradnica- Pozri tiež:
dopredu,vzad,položPero,zdvihniPero,choďNa(Poloha),choďNa(Shape),skočNa(double, double),skočNa(Poloha),skočNa(Shape),choď(double, double),skoč(double, double),choďPoOblúku(double, double),choďNaMyš()
-
chodNa
public void chodNa(double novéX, double novéY) Alias pre choďNa.
-
choďNa
public void choďNa(Poloha objekt)
Prikáže tomuto robotu, aby prešiel na polohu zadaného objektu. Keď je pero položené, tak kreslí čiaru. Robot nezmení smer, kam bol obrátený.
- Parametre:
objekt– objekt určujúci cieľovú polohu- Pozri tiež:
choďNa(double, double),choďNa(Shape),skočNa(double, double),skočNa(Poloha),skočNa(Shape),choď(double, double),skoč(double, double)
-
choďNa
public void choďNa(Shape tvar)
Prikáže robotu, aby prešiel do stredu hraníc[1] zadaného tvaru. Keď je pero položené, tak kreslí čiaru. Robot nezmení smer, kam bol obrátený.
[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
- Parametre:
tvar– tvar Javy (Shape), do stredu hraníc ktorého prejde tento robot- Pozri tiež:
choďNa(double, double),choďNa(Poloha),skočNa(double, double),skočNa(Poloha),skočNa(Shape),choď(double, double),skoč(double, double)
-
choďNaMyš
public void choďNaMyš()
Prikáže robotu, aby na podlahe (strope) prešiel na aktuálne súradnice myši. Keď je pero položené, tak kreslí čiaru. Robot nezmení smer, kam bol obrátený.
- Pozri tiež:
choďNa(double, double),skočNaMyš()
-
chodNaMys
public void chodNaMys()
Alias pre choďNaMyš.
-
choď
public void choď(double Δx, double Δy)Prikáže robotu, aby sa posunul o zadané súradnice v horizontálnom a vertikálnom smere. Keď je pero položené, tak kreslí čiaru po aktívnom plátne (podlahe alebo strope). Robot nezmení aktuálny smer.
- Parametre:
Δx– miera posunutia v smere osi xΔy– miera posunutia v smere osi y- Pozri tiež:
choďNa(double, double),choďNa(Poloha),choďNa(Shape),skočNa(double, double),skočNa(Poloha),skočNa(Shape),skoč(double, double)
-
chod
public void chod(double Δx, double Δy) Alias pre choď.
-
choď
public void choď(Poloha poloha)
Prikáže robotu, aby sa posunul (prešiel) o súradnice, ktoré obsahuje zadaná inštancia polohy. To znamená, že súradnice polohy sú prevedené na relatívne súradnice. Keď je pero položené, tak kreslí čiaru po aktívnom plátne (podlahe alebo strope). Robot nezmení aktuálny smer.
- Parametre:
poloha– poloha, ktorá bude prevedená na relatívne súradnice skoku- Pozri tiež:
choď(double, double)
-
skočNa
public void skočNa(double novéX, double novéY)Prikáže robotu, aby preskočil na konkrétne súradnice na podlahe (strope). Robot nekreslí čiaru, ani nezmení smer, kam bol obrátený.
- Parametre:
novéX– nová x-ová súradnicanovéY– nová y-ová súradnica- Pozri tiež:
dopredu,vzad,choďNa(double, double),choďNa(Poloha),choďNa(Shape),skočNa(Poloha),skočNa(Shape),choď(double, double),skoč(double, double),skočPoOblúku(double, double),skočNaMyš()
-
skocNa
public void skocNa(double novéX, double novéY) Alias pre skočNa.
-
skočNa
public void skočNa(Poloha objekt)
Prikáže tomuto robotu, aby preskočil na polohu zadaného objektu. Robot nekreslí čiaru, ani nezmení smer, kam bol obrátený.
- Parametre:
objekt– objekt určujúci cieľovú polohu- Pozri tiež:
choďNa(double, double),choďNa(Poloha),choďNa(Shape),skočNa(double, double),skočNa(Shape),choď(double, double),skoč(double, double)
-
skočNa
public void skočNa(Shape tvar)
Prikáže robotu, aby preskočil do stredu hraníc[1] zadaného tvaru. Robot nekreslí čiaru, ani nezmení smer, kam bol obrátený.
[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
- Parametre:
tvar– tvar Javy (Shape), do stredu hraníc ktorého preskočí tento robot- Pozri tiež:
choďNa(double, double),choďNa(Poloha),choďNa(Shape),skočNa(double, double),skočNa(Poloha),choď(double, double),skoč(double, double)
-
skočNaMyš
public void skočNaMyš()
Prikáže robotu, aby v rámci podlahy (stropu) preskočil na aktuálne súradnice myši. Robot nekreslí čiaru, ani nezmení smer, kam bol obrátený.
- Pozri tiež:
skočNa(double, double),choďNaMyš()
-
skocNaMys
public void skocNaMys()
Alias pre skočNaMyš.
-
skoč
public void skoč(double Δx, double Δy)Prikáže robotu, aby sa na podlahe (strope) preskočil o zadané súradnice v horizontálnom a vertikálnom smere. Robot nekreslí čiaru, ani nezmení svoj aktuálny smer.
- Parametre:
Δx– miera posunutia v smere osi xΔy– miera posunutia v smere osi y- Pozri tiež:
choďNa(double, double),choďNa(Poloha),choďNa(Shape),skočNa(double, double),skočNa(Poloha),skočNa(Shape),choď(double, double),skoč(Poloha)
-
skoc
public void skoc(double Δx, double Δy) Alias pre skoč.
-
skoč
public void skoč(Poloha poloha)
Prikáže robotu, aby sa na podlahe (strope) preskočil o súradnice, ktoré obsahuje zadaná inštancia polohy. To znamená, že súradnice polohy sú prevedené na relatívne súradnice. Robot nekreslí čiaru, ani nezmení svoj aktuálny smer.
- Parametre:
poloha– poloha, ktorá bude prevedená na relatívne súradnice skoku- Pozri tiež:
skoč(double, double)
-
posuň
public void posuň(double Δx, double Δy)Prikáže robotu, aby sa posunul o zadané súradnice smere osí x a y, pričom obe osi sú pootočené podľa rozdielu aktuálneho smeru robota a uhla 90°. To znamená, že ak je aktuálny uhol robota rovný 90° (čo je predvolená hodnota), tak sa príkaz správa rovnako ako príkaz
choď(Δx, Δy)(čiže súradnicový systém nie je pootočený), inak robot skočí v rámci pootočeného súradnicového priestoru. Keď je pero robota položené, tak robot kreslí čiaru.Poznámka: Príklad používajúcu túto metódu je v opise metódy
preskoč.- Parametre:
Δx– miera posunutia, o ktorú sa má robot posunúť „doprava“ – v smere kolmom vzhľadom na svoju orientáciu (záporné hodnoty posúvajú robot „doľava“)Δy– miera posunutia, o ktorú sa má robot posunúť „dopredu“ – priamo v smere svojej orientácie (opäť, záporné súradnice posúvajú robot „dozadu“)- Pozri tiež:
preskoč(double, double),posuňVSmere(double, double),preskočVSmere(double, double),posuňVSmere(Smer, double),preskočVSmere(Smer, double),posuňVSmere(double),preskočVSmere(double),posuňVSmere(Smer),preskočVSmere(Smer)
-
posun
public void posun(double Δx, double Δy) Alias pre posuň.
-
preskoč
public void preskoč(double Δx, double Δy)Prikáže robotu, aby preskočil o zadané súradnice smere osí x a y, pričom obe osi sú pootočené podľa rozdielu aktuálneho smeru robota a uhla 90°. To znamená, že ak je aktuálny uhol robota rovný 90° (čo je predvolená hodnota), tak sa príkaz správa rovnako ako príkaz
skoč(Δx, Δy)(čiže súradnicový systém nie je pootočený), inak robot skočí v rámci pootočeného súradnicového priestoru. Robot pri skákaní nekreslí čiaru.Príklad:
Tento príklad ukazuje ako funguje metóda
preskoč– ľavé tlačidlo posúva robot po plátne s použitím tejto metódy a pravé tlačidlo otáča robot smerom na myš. Po spustení programu funguje metódapreskočrovnako ako metódaskoč, pretože predvolený smer robota je 90°. Rozdiel sa prejaví až po pootočení robota iným smerom. Príklad tiež používa metóduposuňna nakreslenie osí súradnicových sústav (stabilnej a pootočenej).importknižnica.*;publicclassTestPosunovRobotaextendsGRobot{// Kreslenie osí súradnicových sústav…privatevoidkresliOsi() {// Záloha polohy, smeru a farby robota:Polohap =poloha();doubleu =uhol();Farbaf =farba();skočNa(0,0);// Stabilná súradnicová sústava:farba(čierna);skoč(-200,0);choď(400,0);skoč(-200,200);choď(0, -400);skoč(0,200);// Pootočená súradnicová sústava:farba(tyrkysová);preskoč(-200,0);posuň(400,0);preskoč(-200,200);posuň(0, -400);// Obnovenie parametrov zo zálohy:poloha(p);uhol(u);farba(f); }@OverridepublicvoidstlačenieTlačidlaMyši() {// Reakcia stlačenia tlačidla myši funguje// rovnako ako ťahanie myšou:ťahanieMyšou(); }@OverridepublicvoidťahanieMyšou() {if(ÚdajeUdalostí.tlačidloMyši(ĽAVÉ)) {// Ľavé tlačidlo presunie robot od stredu// o súradnice myši s použitím metódy preskoč// (čiže v súradnicovej sústave pootočenej// o zmenu smeru robota):skočNa(0,0);preskoč(ÚdajeUdalostí.súradnicaMyšiX(),ÚdajeUdalostí.súradnicaMyšiY()); }else{// Ostatné tlačidlá otočia robot na myš:Svet.vymaž();otočNaMyš(); kresliOsi(); } }publicstaticvoidmain(String... args) {// Trieda TestPosunovRobota nemá definovaný žiadny konštruktor,// preto inicializáciu (prvé volanie metódy kresliOsi) vykonávame// tu:newTestPosunovRobota().kresliOsi(); } }Výsledok:
Príklad v činnosti: Robot bol pootočený (použitím pravého tlačidla) a potom posunutý v rámci pootočenej súradnicovej sústavy (tyrkysová farba).- Parametre:
Δx– miera posunutia, o ktorú má robot preskočiť „doprava“ – v smere kolmom vzhľadom na jeho orientáciu (záporné hodnoty kážu robotu skákať „doľava“)Δy– miera posunutia, o ktorú má robot preskočiť „dopredu“ – priamo v smere svojej orientácie (opäť, záporné súradnice mu kážu skákať „dozadu“)- Pozri tiež:
posuň(double, double),posuňVSmere(double, double),preskočVSmere(double, double),posuňVSmere(Smer, double),preskočVSmere(Smer, double),posuňVSmere(double),preskočVSmere(double),posuňVSmere(Smer),preskočVSmere(Smer)
-
preskoc
public void preskoc(double Δx, double Δy) Alias pre preskoč.
-
choďPoOblúku
public void choďPoOblúku(double uhol, double polomer)Pohne robotom po oblúku so zadaným polomerom o zadaný uhol a v prípade, že je položené pero, tak oblúk aj nakreslí. Robot sa predvolene otáča doľava (t. j. pri zadaní kladného uhla otáčania a kladného polomeru sa robot pri pohybe dopredu otáča doľava, čiže kreslí ľavotočivý oblúk). Na obrátenie smeru otáčania (kreslenie pravotočivého oblúka) zadajte záporný polomer otáčania. Pri zadaní záporného uhla bude robot cúvať. Keď je polomer rovný nule, robot zostane stáť aj v prípade, že je uhol nenulový, pretože nie je možné určiť vzdialenosť akú by mal prejsť.
Upozornenie: Vo verzii 2.0 sa zmenil predvolený smer otáčania robota!
- Parametre:
uhol– uhol, o ktorý sa má robot otočiť okolo zadaného polomerupolomer– polomer otáčania- Pozri tiež:
dopredu,vzad,vpravo,vľavo,choďNa,skočNa,choďPoOblúku(double),choďPoOblúku(),skočPoOblúku(double, double),choďNaPoOblúku(double, double),skočNaPoOblúku(double, double),choďNaPoOblúku(Poloha),skočNaPoOblúku(Poloha),polohaPera
-
chodPoObluku
public void chodPoObluku(double uhol, double polomer) Alias pre choďPoOblúku.
-
skočPoOblúku
public void skočPoOblúku(double uhol, double polomer)Pohne robotom po oblúku so zadaným polomerom o zadaný uhol bez jeho nakreslenia. Robot sa predvolene otáča doľava (t. j. pri zadaní kladného uhla otáčania a kladného polomeru sa robot pri pohybe dopredu otáča doľava, čiže sa pohybuje po ľavotočivom oblúku). Na obrátenie smeru otáčania (pohyb po pravotočivom oblúku) zadajte záporný polomer otáčania. Pri zadaní záporného uhla bude robot cúvať. Keď je polomer rovný nule, robot zostane stáť aj v prípade, že je uhol nenulový, pretože nie je možné určiť vzdialenosť akú by mal prejsť.
Upozornenie: Vo verzii 2.0 sa zmenil predvolený smer otáčania robota!
- Parametre:
uhol– uhol, o ktorý sa má robot otočiť okolo zadaného polomerupolomer– polomer otáčania- Pozri tiež:
dopredu,vzad,vpravo,vľavo,choďNa,skočNa,skočPoOblúku(double),skočPoOblúku(),choďPoOblúku(double, double),choďNaPoOblúku(double, double),skočNaPoOblúku(double, double),choďNaPoOblúku(Poloha),skočNaPoOblúku(Poloha)
-
skocPoObluku
public void skocPoObluku(double uhol, double polomer) Alias pre skočPoOblúku.
-
choďPoOblúku
public void choďPoOblúku(double uhol)
Pohne robotom po oblúku s polomerom rovným veľkosti robota o zadaný uhol a v prípade, že je položené pero, tak oblúk aj nakreslí. Ďalej platia rovnaké informácie ako pri metóde
choďPoOblúku(uhol, polomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
uhol– uhol, o ktorý sa má robot otočiť okolo polomeru určeného veľkosťou robota- Pozri tiež:
choďPoOblúku(double, double),veľkosť()
-
chodPoObluku
public void chodPoObluku(double uhol)
Alias pre choďPoOblúku.
-
skočPoOblúku
public void skočPoOblúku(double uhol)
Pohne robotom po oblúku s polomerom rovným veľkosti robota o zadaný uhol bez jeho nakreslenia. Ďalej platia rovnaké informácie ako pri metóde
skočPoOblúku(uhol, polomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
uhol– uhol, o ktorý sa má robot otočiť okolo polomeru určeného veľkosťou robota- Pozri tiež:
skočNaPoOblúku(double, double),veľkosť()
-
skocPoObluku
public void skocPoObluku(double uhol)
Alias pre skočPoOblúku.
-
choďPoOblúku
public void choďPoOblúku()
Pohne robotom po oblúku s polomerom rovným veľkosti robota o aktuálny uhol otáčania a v prípade, že je položené pero, tak oblúk aj nakreslí. Pozri metódy
veľkosť()auholOtáčania(). Ďalej platia rovnaké informácie ako pri metódechoďPoOblúku(uhol, polomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Pozri tiež:
choďPoOblúku(double, double),veľkosť(),uholOtáčania()
-
chodPoObluku
public void chodPoObluku()
Alias pre choďPoOblúku.
-
skočPoOblúku
public void skočPoOblúku()
Pohne robotom po oblúku s polomerom rovným veľkosti robota o aktuálny uhol otáčania bez nakreslenia oblúka. Pozri metódy
veľkosť()auholOtáčania(). Ďalej platia rovnaké informácie ako pri metódeskočPoOblúku(uhol, polomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Pozri tiež:
skočNaPoOblúku(double, double),veľkosť(),uholOtáčania()
-
skocPoObluku
public void skocPoObluku()
Alias pre skočPoOblúku.
-
choďPoOblúku
public void choďPoOblúku(double uhol, boolean vpravo)Pohne robotom po oblúku s polomerom rovným veľkosti robota o zadaný uhol a v prípade, že je položené pero, tak oblúk aj nakreslí. Ak je hodnota parametra
vpravorovnátrue, tak sa robot bude otáčať doprava. Inak platia rovnaké informácie ako pri metódechoďPoOblúku(uhol, polomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
uhol– uhol, o ktorý sa má robot otočiť okolo polomeru určeného veľkosťou robotavpravo– ak je táto hodnota rovnátrue, tak sa robot bude otáčať doprava- Pozri tiež:
choďPoOblúku(double, double),veľkosť()
-
chodPoObluku
public void chodPoObluku(double uhol, boolean vpravo) Alias pre choďPoOblúku.
-
skočPoOblúku
public void skočPoOblúku(double uhol, boolean vpravo)Pohne robotom po oblúku s polomerom rovným veľkosti robota o zadaný uhol bez jeho nakreslenia. Ak je hodnota parametra
vpravorovnátrue, tak sa robot bude otáčať doprava. Inak platia rovnaké informácie ako pri metódeskočPoOblúku(uhol, polomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
uhol– uhol, o ktorý sa má robot otočiť okolo polomeru určeného veľkosťou robotavpravo– ak je táto hodnota rovnátrue, tak sa robot bude otáčať doprava- Pozri tiež:
skočNaPoOblúku(double, double),veľkosť()
-
skocPoObluku
public void skocPoObluku(double uhol, boolean vpravo) Alias pre skočPoOblúku.
-
choďPoOblúku
public void choďPoOblúku(boolean vpravo)
Pohne robotom po oblúku s polomerom rovným veľkosti robota o aktuálny uhol otáčania a v prípade, že je položené pero, tak oblúk aj nakreslí. Pozri metódy
veľkosť()auholOtáčania(). Ak je hodnota parametravpravorovnátrue, tak sa robot bude otáčať doprava. Inak platia rovnaké informácie ako pri metódechoďPoOblúku(uhol, polomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
vpravo– ak je táto hodnota rovnátrue, tak sa robot bude otáčať doprava- Pozri tiež:
choďPoOblúku(double, double),veľkosť(),uholOtáčania()
-
chodPoObluku
public void chodPoObluku(boolean vpravo)
Alias pre choďPoOblúku.
-
skočPoOblúku
public void skočPoOblúku(boolean vpravo)
Pohne robotom po oblúku s polomerom rovným veľkosti robota o aktuálny uhol otáčania bez nakreslenia oblúka. Pozri metódy
veľkosť()auholOtáčania(). Ak je hodnota parametravpravorovnátrue, tak sa robot bude otáčať doprava. Inak platia rovnaké informácie ako pri metódeskočPoOblúku(uhol, polomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
vpravo– ak je táto hodnota rovnátrue, tak sa robot bude otáčať doprava- Pozri tiež:
skočNaPoOblúku(double, double),veľkosť(),uholOtáčania()
-
skocPoObluku
public void skocPoObluku(boolean vpravo)
Alias pre skočPoOblúku.
-
choďNaPoOblúku
public void choďNaPoOblúku(double x, double y)Pohne robotom po oblúku do cieľového bodu určeného súradnicami [x, y] s ohľadom na aktuálne otočenie robota. Ak robot smeruje približne na miesto súradníc (s odchýlkou ±0,0001°), tak sa pohne do cieľového miesta po úsečke (pričom bude pootočený o nepatrnú odchýlku). Ak má robot položené pero, tak pri pohybe kreslí čiaru. Robot nesmie smerovať presne opačným smerom od cieľového miesta, inak vznikne výnimka.
Poznámka: Situácia so vznikom výnimky by sa s cieľom zvýšenia komfortu práce s programovacím rámcom dala vyriešiť generovaním dvoch úsečiek – jednej smerujúcej z aktuálnej pozície do „nekonečna“ v smere robota a druhej prichádzajúca z opačnej strany (z „protiľahlého nekonečna“) do cieľového bodu. Problém je v definovaní nekonečna. Aké úsečky by boli dostatočne dlhé na to, aby smerovali zdanlivo do nekonečna a aby pritom nevznikali prípadné nežiadúce skreslenia, ktoré sa v niektorých prípadoch prejavujú pri práci s údajovým typom
double? Robot navyše pri kreslení generuje tvary Javy, ktoré sa môžu stať súčasťou zachytenej cesty. Tá môže byť exportovaná mimo programovací rámec. Vždy by sa našiel spôsob, ktorý by tento „malý trik“ odhalil, preto táto metóda radšej generuje výnimku a vyriešenie situácie ponecháva na programátora používajúceho tento programovací rámec.Príklad:
for(inti =0; i <360; i +=2.5) {uhol(i);skočNa(-100,0);if(i !=180)choďNaPoOblúku(100,0); }Výsledok:
Vzor pripomínajúci siločiary nakreslený pomocou metódychoďNaPoOblúku.- Parametre:
x– x-ová súradnica cieľového boduy– y-ová súradnica cieľového bodu- Výnimky:
GRobotException– ak je robot obrátený opačným smerom než sa nachádza cieľový bod (o 180° smerom od neho)- Pozri tiež:
choďNa,choďPoOblúku(double, double),skočPoOblúku(double, double),skočNaPoOblúku(double, double),polohaPera
-
chodNaPoObluku
public void chodNaPoObluku(double x, double y) Alias pre choďNaPoOblúku.
-
choďNaPoOblúku
public void choďNaPoOblúku(Poloha poloha)
Funguje rovnako ako
choďNaPoOblúku(x, y), ale namiesto samostatných súradníc prijíma implementáciu rozhraniaPoloha(napríkladBod).Varovanie! Počas pridávania metódy
vajcebolo zistené nevysvetliteľné správanie: S použitím tejto verzie metódy (choďNaPoOblúku(poloha)) nefungoval mechanizmus vytvárania cesty. Všetko začalo fungovať po použití verzie metódychoďNaPoOblúku(double, double). (Preto metódavajcenakoniec volá tú druhú verziu chodenia po oblúku.) Lenže to nedáva žiadny zmysel. MetódachoďNaPoOblúku(poloha)volá metóduchoďNaPoOblúku(double, double)a to do bodky rovnakým spôsobom, takže vo výsledku by nemal byť žiadny rozdiel! Ani hlboké testovanie s využitím trasovania cez zásobník volaní neodhalil žiadne podozrivé „odbočky“, ktoré by toto nepochopiteľné správanie pomohli vysvetliť. To isté volanie „zvonka“ tejto metódy funguje, „zvnútra“ spôsobuje problémy. Záhada. Nedá sa to vysvetliť inak, len že virtuálny stroj Javy má nejaký vnútorný problém. V tom čase bola aktuálna verzia JVM 1.8.0_331. Možno budúce verzie túto poruchu odstránia. (Keby som mal čas, vytvoril by som prípad použitia a poruchu nahlásil. Žiaľ, momentálne na to nie je priestor… Takže zatiaľ je treba sa tejto poruche skrátka vyhýbať.)- Parametre:
poloha– objekt určujúci súradnice cieľového bodu- Výnimky:
GRobotException– ak je robot obrátený opačným smerom než sa nachádza cieľový bod (o 180° smerom od neho)- Pozri tiež:
choďPoOblúku(double, double),skočPoOblúku(double, double),choďNaPoOblúku(double, double),skočNaPoOblúku(double, double),skočNaPoOblúku(Poloha)
-
chodNaPoObluku
public void chodNaPoObluku(Poloha poloha)
Alias pre choďNaPoOblúku.
-
skočNaPoOblúku
public void skočNaPoOblúku(double x, double y)Pohne robotom po oblúku do cieľového bodu určeného súradnicami [x, y] s ohľadom na aktuálne otočenie robota bez nakreslenia oblúka. Ak robot smeruje približne na miesto súradníc (s odchýlkou ±0,0001°), tak sa pohne do cieľového miesta po úsečke (pričom bude pootočený o nepatrnú odchýlku). Robot nesmie smerovať presne opačným smerom od cieľového miesta, inak vznikne výnimka.
- Parametre:
x– x-ová súradnica cieľového boduy– y-ová súradnica cieľového bodu- Výnimky:
GRobotException– ak je robot obrátený opačným smerom než sa nachádza cieľový bod (o 180° smerom od neho)- Pozri tiež:
skočNa,choďPoOblúku(double, double),skočPoOblúku(double, double),choďNaPoOblúku(double, double)
-
skocNaPoObluku
public void skocNaPoObluku(double x, double y) Alias pre skočNaPoOblúku.
-
skočNaPoOblúku
public void skočNaPoOblúku(Poloha poloha)
Funguje rovnako ako
skočNaPoOblúku(x, y), ale namiesto samostatných súradníc prijíma implementáciu rozhraniaPoloha(napríkladBod).- Parametre:
poloha– objekt určujúci súradnice cieľového bodu- Výnimky:
GRobotException– ak je robot obrátený opačným smerom než sa nachádza cieľový bod (o 180° smerom od neho)- Pozri tiež:
choďPoOblúku(double, double),skočPoOblúku(double, double),choďNaPoOblúku(double, double),skočNaPoOblúku(double, double),choďNaPoOblúku(Poloha)
-
skocNaPoObluku
public void skocNaPoObluku(Poloha poloha)
Alias pre skočNaPoOblúku.
-
aktívny
public boolean aktívny()
Overí, či je tento robot aktívny. Aktiváciu je možné dosiahnuť dvomi základnými spôsobmi:
- klasickou aktiváciou, ktorá je preferovaná pri určovaní alebo zmene hodnôt rýchlosti, zrýchlenia a pod.,
- spustením, ktoré je preferované pri stanovovaní a úprave cieľa.
- Návratová hodnota:
trueak je robot aktívny, inakfalse
-
aktivny
public boolean aktivny()
Alias pre aktívny.
-
neaktívny
public boolean neaktívny()
Overí, či je tento robot neaktívny. Vracia presne opačnú informáciu ako metóda
aktívny.- Návratová hodnota:
trueak nie je robot aktívny, inakfalse
-
neaktivny
public boolean neaktivny()
Alias pre neaktívny.
-
pasívny
public boolean pasívny()
Alias pre neaktívny.
-
pasivny
public boolean pasivny()
Alias pre neaktívny.
-
aktivuj
public void aktivuj()
Aktivuje robot a spustí časovač (ak je nečinný). Metóda upozorní robot na aktiváciu volaním metódy
aktivácia. Táto metóda je automaticky spustená metódoupracuj, po uplynutí času pasivity (pozri napríkladdeaktivuj(trvaniePasivity)), ak bol tento čas určený. Opakom aktivácie je deaktivácia a alternatívou aktivácie je spustenie, ktoré je preferované v iných situáciách – pozri informácie pri metódeaktívny.- Pozri tiež:
deaktivuj(),spusti()
-
aktivuj
public void aktivuj(int trvanieAktivity)
Metóda má rovnaký účel ako metóda
aktivuj(), ibaže dovoľuje programátorovi určiť trvanie aktivity. Trvanie je určené celým číslom, ktoré vyjadruje počet tikov časovača, po ktorých je robot automaticky deaktivovaný[1]. Po uplynutí času trvania aktivity je robot deaktivovaný spustením metódydeaktivuj.[1] – ak chceme získať údaj v sekundách, tak musíme trvanie aktivity násobiť intervalom časovača; avšak spúšťanie tikov časovača nikdy nie je úplne presné, preto ani vypočítaný údaj v sekundách nikdy nebude úplne presný – skutočný čas aktivity robota sa môže líšiť podľa momentálneho zaťaženia systému…
- Parametre:
trvanieAktivity– celé číslo určujúce počet tikov časovača, po ktorých nastane automatická deaktivácia; nula znamená aktiváciu na neurčitý čas (dokedy nie je robot deaktivovaný iným spôsobom)
-
aktivuj
public void aktivuj(boolean ajČasovač)
Metóda má rovnaký účel ako metóda
aktivuj()s tým, že dovoľuje programátorovi určiť, či má byť automaticky spustený časovač (ak nie je v činnosti).- Parametre:
ajČasovač– ak jetrue, je (v prípade, že je nečinný) automaticky spustený časovač
-
aktivuj
public void aktivuj(int trvanieAktivity, boolean ajČasovač)Metóda spája funkcionalitu metód
aktivuj(trvanieAktivity)aaktivuj(ajČasovač). Platia rovnaké pravidlá ako pri spomenutých metódach…- Parametre:
trvanieAktivity– celé číslo určujúce počet tikov časovača, po ktorých nastane automatická deaktivácia; nula znamená aktiváciu na neurčitý čas (dokedy nie je robot deaktivovaný iným spôsobom)ajČasovač– ak jetrue, je (v prípade, že je nečinný) automaticky spustený časovač
-
deaktivuj
public void deaktivuj()
Deaktivuje robot (napríklad po skončení trvania aktivity). Účelom tejto metódy je deaktivovať robot a upozorniť na to inštanciu robota volaním prislúchajúcej metódy – pri spustení tejto metódy je automaticky zavolaná metóda
deaktivácia. Metódadeaktivujje automaticky spustená aj metódoupracujpo skončení trvania aktivity tohto robota (pozri napríkladaktivuj(trvanieAktivity)). Táto metóda je opakom skupiny metódaktivuja alternatívou metódyzastav, ktorá je preferovaná v iných prípadoch…- Pozri tiež:
aktivuj(),deaktivuj(),deaktivuj(int),deaktivuj(boolean),deaktivuj(int, boolean),zastav()
-
deaktivuj
public void deaktivuj(int trvaniePasivity)
Metóda má rovnaký účel ako metóda
deaktivuj(), ibaže dovoľuje programátorovi určiť trvanie pasivity. Trvanie je určené celým číslom, ktoré vyjadruje počet tikov časovača, po ktorých je robot automaticky aktivovaný[1]. Po uplynutí času pasivity, je robot automaticky aktivovaný spustením metódyaktivuj.[1] – ak chceme získať údaj v sekundách, tak musíme trvanie pasivity násobiť intervalom časovača; avšak spúšťanie tikov časovača nikdy nie je úplne presné, preto ani vypočítaný údaj v sekundách nikdy nebude úplne presný – skutočný čas pasivity robota sa môže líšiť podľa momentálneho zaťaženia systému…
-
deaktivuj
public void deaktivuj(boolean ajČasovač)
Metóda má rovnaký účel ako metóda
deaktivuj()s tým, že dovoľuje programátorovi určiť, či má byť automaticky spustený časovač (ak nie je v činnosti).- Parametre:
ajČasovač– ak jetrue, je (v prípade, že je nečinný) automaticky spustený časovač
-
deaktivuj
public void deaktivuj(int trvaniePasivity, boolean ajČasovač)Metóda spája funkcionalitu metód
deaktivuj(trvaniePasivity)adeaktivuj(ajČasovač). Platia rovnaké pravidlá ako pri spomenutých metódach…- Parametre:
trvaniePasivity– celé číslo určujúce počet tikov časovača, po ktorých nastane automatická aktivácia; nula znamená deaktiváciu na neurčitý čas (navždy alebo kým nenastane aktivácia iným spôsobom)ajČasovač– ak jetrue, je (v prípade, že je nečinný) automaticky spustený časovač- Pozri tiež:
aktivuj(),deaktivuj(),deaktivuj(int),deaktivuj(boolean),zastav()
-
spusti
public void spusti()
Aktivuje robot alternatívnym spôsobom a spustí časovač (ak je nečinný). Metóda upozorní robot na spustenie (alternatívnu aktiváciu) volaním metódy
spustenie. Opakom tohto spôsobu aktivácie je (okamžité) zastavenie a alternatívou je klasická aktivácia, ktorá je preferovaná v iných situáciách – pozri informácie pri metódeaktívny.
-
spusti
public void spusti(int trvanieAktivity)
Metóda má rovnaký účel ako metóda
spusti(), ibaže dovoľuje programátorovi určiť trvanie aktivity. Trvanie je určené celým číslom, ktoré vyjadruje počet tikov časovača, po ktorých je robot automaticky deaktivovaný[1]. Bez ohľadu na to, že ide o alternatívny spôsob aktivácie, je po uplynutí trvania aktivity spustená metódadeaktivuj(čiže niezastav[2]).[1] – ak chceme získať údaj v sekundách, musíme trvanie aktivity násobiť intervalom časovača; avšak spúšťanie tikov časovača nikdy nie je úplne presné, preto ani vypočítaný údaj v sekundách nikdy nebude úplne presný – skutočný čas aktivity robota sa môže líšiť podľa momentálneho zaťaženia systému…
[2] – vo všeobecnosti to, či je robot automaticky deaktivovaný metódou
deaktivujalebozastavzávisí od situácie; zastavenie je viazané k dosiahnutiu cieľa, deaktivácia ku všetkým ostatným okolnostiam skončenia aktivity (vrátane tejto)…- Parametre:
trvanieAktivity– celé číslo určujúce počet tikov časovača, po ktorých nastane automatická deaktivácia; nula znamená deaktiváciu na neurčitý čas (navždy alebo kým nenastane aktivácia iným spôsobom)
-
spusti
public void spusti(boolean ajČasovač)
Metóda má rovnaký účel ako metóda
spusti()s tým, že dovoľuje programátorovi určiť, či má byť automaticky spustený časovač (ak už nie je v činnosti).- Parametre:
ajČasovač– ak jetrue, je (v prípade, že je nečinný) automaticky spustený časovač
-
spusti
public void spusti(int trvanieAktivity, boolean ajČasovač)Metóda spája funkcionalitu metód
spusti(trvanieAktivity)aspusti(ajČasovač). Platia rovnaké pravidlá ako pri spomenutých metódach…- Parametre:
trvanieAktivity– celé číslo určujúce počet tikov časovača, po ktorých nastane automatická deaktivácia; nula znamená deaktiváciu na neurčitý čas (navždy alebo kým nenastane aktivácia iným spôsobom)ajČasovač– ak jetrue, je (v prípade, že je nečinný) automaticky spustený časovač
-
zastav
public void zastav()
Deaktivuje robot (napríklad po dosiahnutí cieľa). Účelom tejto metódy je deaktivovať robot, zastaviť (zrušiť) smerovanie do cieľa (pozri
cieľalebo niektorý jej „klon“) a upozorniť na to inštanciu robota volaním prislúchajúcej metódy – pri spustení tejto metódy je automaticky zavolaná metódazastavenie. Metódazastavje automaticky spustená aj metódoupracujpo dosiahnutí určeného cieľa týmto robotom (pozri napríklad vyššie spomenutú metóducieľ(x, y)). Táto metóda je opakom skupiny metódspustia alternatívou metódydeaktivuj, ktorá je preferovaná v iných situáciách…Pozor! Pozor na podobnosť názvu so skupinou metód
zabrzdi, ktoré sú protikladom supiny metódrozbehniSaa ich cieľom je zahájiť brzdenie pohybujúceho sa robota…- Pozri tiež:
spusti(),zastav(int),zastav(boolean),zastav(int, boolean),deaktivuj(),zastavPosun()
-
zastav
public void zastav(int trvaniePasivity)
Metóda má rovnaký účel ako metóda
zastav(), ibaže dovoľuje programátorovi naplánovať automatickú aktiváciu. Čas do automatickej aktivácie je určený celým číslom, ktoré vyjadruje počet tikov časovača[1]. Bez ohľadu na to, že ide o alternatívny spôsob deaktivácie, je robot po uplynutí naplánovaného času aktivovaný metódouaktivuj(čiže niespusti).[1] – ak chceme získať údaj v sekundách, musíme trvanie aktivity násobiť intervalom časovača; avšak spúšťanie tikov časovača nikdy nie je úplne presné, preto ani vypočítaný údaj v sekundách nikdy nebude úplne presný – skutočný čas čakania robota v pasívnom režime na automatickú aktiváciu sa môže líšiť podľa momentálneho zaťaženia systému…
- Parametre:
trvaniePasivity– celé číslo určujúce počet tikov časovača, po ktorých nastane automatická aktivácia; nulová alebo záporná hodnota znamená, že automatická aktivácia nie je je naplánovaná- Pozri tiež:
zastav(),zastav(boolean),zastav(int, boolean),zastavPosun()
-
zastav
public void zastav(boolean ajČasovač)
Metóda má rovnaký účel ako metóda
zastav()s tým, že dovoľuje programátorovi určiť, či má byť automaticky spustený časovač (ak už nie je v činnosti).- Parametre:
ajČasovač– ak jetrue, je (v prípade, že je nečinný) automaticky spustený časovač- Pozri tiež:
zastav(),zastav(int),zastav(int, boolean),zastavPosun()
-
zastav
public void zastav(int trvaniePasivity, boolean ajČasovač)Metóda spája funkcionalitu metód
zastav(trvaniePasivity)azastav(ajČasovač). Platia rovnaké pravidlá ako pri spomenutých metódach…- Parametre:
trvaniePasivity– celé číslo určujúce počet tikov časovača, po ktorých nastane automatická aktivácia; nulová alebo záporná hodnota znamená, že automatická aktivácia nie je je naplánovanáajČasovač– ak jetrue, je (v prípade, že je nečinný) automaticky spustený časovač- Pozri tiež:
zastav(),zastav(int),zastav(boolean),zastavPosun()
-
zastavPosun
public void zastavPosun()
Volanie tejto metódy (či už automatické alebo ručné) spôsobí zastavenie pohybu v kolmom smere voči aktuálnej orientácii robota – zastavenie posunu.
Táto metóda je automaticky spustená pri splnení nasledujúcich podmienok:
- zrýchlenie posunu má nenulovú hodnotu,
- je nastavený príznak zastavenia po spomalení posunu
- a rýchlosť posun sa dotkla nulovej hranice.
Poznámka: Ak je zrýchlenie posunu nenulové, tak nemá volanie tejto metódy zmysel. Vtedy sa dá posun zastaviť jedine nastavením nulovej rýchlosti posunu.
Úspešné vykonanie zastavenia posunu je signalizované udalosťou
zastaveniePosunu.
-
trvanieAktivity
public int trvanieAktivity()
Zisťuje aktuálnu hodnotu trvania aktivity, čo je vlastne čas meraný v tikoch aplikácie. Hodnota
0(alebo záporná hodnota) znamená explicitne neobmedzené trvanie aktivity. (To znamená, že nie je otvorene stanovený čas, po ktorom sa má robot deaktivovať a deaktivácia nastane buď po otvorenej výzve, alebo po vzniknutí inej vhodnej udalosti.)- Návratová hodnota:
- explicitne (otvorene) stanovený čas v tikoch zostávajúci do ukončenia stavu aktivity alebo nekladná hodnota vypovedajúca o tom, že trvanie aktivity nie je explicitne časovo obmedzené
-
trvanieAktivity
public void trvanieAktivity(int trvanieAktivity)
Umožňuje zmeniť aktuálne trvanie aktivity. Meniť túto hodnotu má zmysel len počas trvania stavu aktivity robota (napríklad v reakciách
aktiváciaaaktivitaalebo tesne po aktivovaní robota, napríklad metódourýchlosť), pretože všetky metódy slúžiace na aktiváciu alebo spustenie robota túto hodnotu prepisujú (väčšinou na nulu, čo znamená neobmedzené trvanie).- Parametre:
trvanieAktivity– nový čas trvania stavu aktivity; nekladné hodnoty (nula a záporné hodnoty) určujú, že aktivita nemá byť otvorene časovo obmedzená
-
trvaniePasivity
public int trvaniePasivity()
Zisťuje aktuálnu hodnotu trvania pasivity. Tento čas je meraný v tikoch časovača. Hodnota
0(alebo záporná hodnota) znamená neobmedzené trvanie pasivity. (To znamená, že nie je stanovený čas, po ktorom sa má robot automaticky aktivovať a aktivácia nastane napríklad po vzniknutí vhodnej udalosti alebo po spustení príkazu aktivácie.)- Návratová hodnota:
- čas v tikoch, po ktorom má byť robot automaticky aktivovaný; nulová alebo záporná hodnota znamená, že automatická aktivácia nie je je naplánovaná
-
trvaniePasivity
public void trvaniePasivity(int trvaniePasivity)
Umožňuje zmeniť trvanie pasivity – naplánovať automatickú aktiváciu po uplynutí zadaného časového intervalu. Meniť túto hodnotu má zmysel len počas trvania stavu pasivity robota (napríklad v reakciách
deaktiváciaapasivitaalebo tesne po deaktivácii robota, napríklad metódouzastav), pretože všetky metódy slúžiace na deaktiváciu alebo zastavenie robota túto hodnotu prepisujú (väčšinou na nulu, čo znamená nenaplánovanie automatickej aktivácie).- Parametre:
trvaniePasivity– nový čas trvania stavu pasivity; nulová alebo záporná hodnota znamená, že automatická aktivácia nie je je naplánovaná
-
rýchlosť
public double rýchlosť()
Zistí aktuálnu hodnotu
rýchlosti tohto robota.
Nenulová rýchlosť ešte neznamená, že robot sa pohybuje.
Pohybujú sa len aktívne roboty.- Návratová hodnota:
- aktuálna rýchlosť tohto robota
-
rychlost
public double rychlost()
Alias pre rýchlosť.
-
rýchlosť
public void rýchlosť(double rýchlosť)
Nastaví robotu novú hodnotu
rýchlosti a ak je zadaná nenulová hodnota, automaticky ho
aktivuje (čo môže viesť ku vzniku
ďalších udalostí opísaných pri metóde aktivuj()), aby sa mohol pohybovať. Ak je zadaná nulová hodnota rýchlosti, robot nie je automaticky deaktivovaný.- Parametre:
rýchlosť– nová hodnota rýchlosti
-
rychlost
public void rychlost(double rýchlosť)
Alias pre rýchlosť.
-
rýchlosť
public void rýchlosť(double rýchlosť, boolean aktivuj)Nastaví robotu novú hodnotu rýchlosti a dovolí programátorovi rozhodnúť, či má byť robot automaticky aktivovaný. Neaktívne roboty sa nepohybujú aj keď majú nastavenú nenulovú rýchlosť.
- Parametre:
rýchlosť– nová hodnota rýchlostiaktivuj– ak jetruea zadaná rýchlosť je nenulová, automaticky aktivuje robot
-
rychlost
public void rychlost(double rýchlosť, boolean aktivuj) Alias pre rýchlosť.
-
maximálnaRýchlosť
public double maximálnaRýchlosť()
Zistí hodnotu maximálnej rýchlosti tohto
robota. Nula znamená „bez obmedzenia.“- Návratová hodnota:
- maximálna rýchlosť tohto robota
-
maximalnaRychlost
public double maximalnaRychlost()
Alias pre maximálnaRýchlosť.
-
najväčšiaRýchlosť
public double najväčšiaRýchlosť()
Alias pre maximálnaRýchlosť.
-
najvacsiaRychlost
public double najvacsiaRychlost()
Alias pre maximálnaRýchlosť.
-
maximálnaRýchlosť
public void maximálnaRýchlosť(double maximálnaRýchlosť)
Nastaví novú hodnotu maximálnej
rýchlosti. Touto hodnotou bude limitovaná rýchlosť robota v kladom i zápornom
smere. Nula znamená „bez obmedzenia.“- Parametre:
maximálnaRýchlosť– nová hodnota maximálnej rýchlosti
-
maximalnaRychlost
public void maximalnaRychlost(double maximálnaRýchlosť)
Alias pre maximálnaRýchlosť.
-
najväčšiaRýchlosť
public void najväčšiaRýchlosť(double najväčšiaRýchlosť)
Alias pre maximálnaRýchlosť.
-
najvacsiaRychlost
public void najvacsiaRychlost(double najväčšiaRýchlosť)
Alias pre maximálnaRýchlosť.
-
rýchlosťPosunu
public double rýchlosťPosunu()
Zistí aktuálnu hodnotu
rýchlosti posunu
tohto robota, čím je chápaná rýchlosť v smere kolmom
na aktuálny smer robota. Nenulová
rýchlosť posunu nemusí automaticky znamenať, že robot sa
pohybuje. Pohybujú sa len aktívne
roboty. Kladná hodnota rýchlosti posunu znamená posúvanie
sa „doprava“ – pri predvolenej orientácii robota „hore“
(na sever – v uhle 90°) to znamená posun v smere uhla 0°
(na východ). Záporná hodnota znamená opačný smer
(„doľava“).- Návratová hodnota:
- aktuálna rýchlosť posunu tohto robota
-
rychlostPosunu
public double rychlostPosunu()
Alias pre rýchlosťPosunu.
-
rýchlosťPosunu
public void rýchlosťPosunu(double rýchlosťPosunu)
Nastaví robotu novú hodnotu
rýchlosti posunu tohto robota a ak je zadaná nenulová
hodnota, tak robot automaticky aktivuje (čo môže viesť ku vzniku ďalších udalostí
opísaných pri metóde aktivuj()), aby sa mohol pohybovať. Rýchlosťou posunu sa rozumie rýchlosť v smere kolmom na aktuálny smer robota. Kladná hodnota rýchlosti posunu znamená posúvanie sa „doprava“ – pri predvolenej orientácii robota „hore“ (na sever – v uhle 90°) to znamená posun v smere uhla 0° (na východ). Záporná hodnota znamená opačný smer („doľava“). Ak je zadaná nulová hodnota rýchlosti posunu, tak robot nie je automaticky deaktivovaný.- Parametre:
rýchlosť– posunu nová hodnota rýchlosti
-
rychlostPosunu
public void rychlostPosunu(double rýchlosťPosunu)
Alias pre rýchlosťPosunu.
-
rýchlosťPosunu
public void rýchlosťPosunu(double rýchlosťPosunu, boolean aktivuj)Nastaví robotu novú hodnotu rýchlosti posunu a dovolí programátorovi rozhodnúť, či má byť robot automaticky aktivovaný. Neaktívne roboty sa nepohybujú aj keď majú nastavenú nenulovú rýchlosť posunu.
- Parametre:
rýchlosťPosunu– nová hodnota rýchlosti posunuaktivuj– ak jetruea zadaná rýchlosť posunu je nenulová, tak automaticky aktivuje robot
-
rychlostPosunu
public void rychlostPosunu(double rýchlosťPosunu, boolean aktivuj) Alias pre rýchlosťPosunu.
-
maximálnaRýchlosťPosunu
public double maximálnaRýchlosťPosunu()
Zistí hodnotu maximálnej rýchlosti
posunu tohto robota. Nula znamená „bez obmedzenia.“- Návratová hodnota:
- maximálna rýchlosť posunu tohto robota
-
maximalnaRychlostPosunu
public double maximalnaRychlostPosunu()
Alias pre maximálnaRýchlosťPosunu.
-
najväčšiaRýchlosťPosunu
public double najväčšiaRýchlosťPosunu()
Alias pre maximálnaRýchlosťPosunu.
-
najvacsiaRychlostPosunu
public double najvacsiaRychlostPosunu()
Alias pre maximálnaRýchlosťPosunu.
-
maximálnaRýchlosťPosunu
public void maximálnaRýchlosťPosunu(double maximálnaRýchlosťPosunu)
Nastaví novú hodnotu maximálnej
rýchlosti posunu. Touto hodnotou bude limitovaná
rýchlosť posunu
tohto robota v kladom i zápornom smere. Nula znamená
„bez obmedzenia.“- Parametre:
maximálnaRýchlosťPosunu– nová hodnota maximálnej rýchlosti posunu
-
maximalnaRychlostPosunu
public void maximalnaRychlostPosunu(double maximálnaRýchlosťPosunu)
Alias pre maximálnaRýchlosťPosunu.
-
najväčšiaRýchlosťPosunu
public void najväčšiaRýchlosťPosunu(double najväčšiaRýchlosťPosunu)
Alias pre maximálnaRýchlosťPosunu.
-
najvacsiaRychlostPosunu
public void najvacsiaRychlostPosunu(double najväčšiaRýchlosťPosunu)
Alias pre maximálnaRýchlosťPosunu.
-
uhlováRýchlosť
public double uhlováRýchlosť()
Zistí aktuálnu hodnotu
uhlovej rýchlosti
(rýchlosti otáčania) tohto robota. Kladné hodnoty znamenajú
otáčanie robota doľava. Nenulová uhlová rýchlosť ešte
neznamená, že robot sa otáča. Pohybujú a otáčajú sa len
aktívne roboty.- Návratová hodnota:
- aktuálna uhlová rýchlosť tohto robota
-
uhlovaRychlost
public double uhlovaRychlost()
Alias pre uhlováRýchlosť.
-
rýchlosťOtáčania
public double rýchlosťOtáčania()
Alias pre uhlováRýchlosť.
-
rychlostOtacania
public double rychlostOtacania()
Alias pre uhlováRýchlosť.
-
uhlováRýchlosť
public void uhlováRýchlosť(double uhlováRýchlosť)
Nastaví novú hodnotu uhlovej
rýchlosti (rýchlosti otáčania) tohto robota. Kladné
hodnoty znamenajú otáčanie robota doľava. Ak je zadané
nenulová hodnota, robot je automaticky aktivovaný, aby sa mohol otáčať. Ak je zadaná
nulová hodnota, robot nie je automaticky
deaktivovaný.- Parametre:
uhlováRýchlosť– nová hodnota uhlovej rýchlosti (rýchlosti otáčania)
-
uhlovaRychlost
public void uhlovaRychlost(double uhlováRýchlosť)
Alias pre uhlováRýchlosť.
-
rýchlosťOtáčania
public void rýchlosťOtáčania(double uhlováRýchlosť)
Alias pre uhlováRýchlosť.
-
rychlostOtacania
public void rychlostOtacania(double uhlováRýchlosť)
Alias pre uhlováRýchlosť.
-
uhlováRýchlosť
public void uhlováRýchlosť(double uhlováRýchlosť, boolean aktivuj)Nastaví novú hodnotu uhlovej rýchlosti (rýchlosti otáčania) tohto robota. Kladné hodnoty znamenajú otáčanie robota doľava. Argument
aktivujdovoľuje programátorovi určiť, či smie byť robot (v prípade zadania nenulovej hodnoty uhlovej rýchlosti) aktivovaný. Neaktívne roboty sa nepohybujú ani neotáčajú aj keď majú nastavenú nenulovú rýchlosť, resp. rýchlosť otáčania.- Parametre:
uhlováRýchlosť– nová hodnota uhlovej rýchlosti (rýchlosti otáčania)aktivuj– ak jetruea zadaná hodnota uhlovej rýchlosti je nenulová, robot je aktivovaný
-
uhlovaRychlost
public void uhlovaRychlost(double uhlováRýchlosť, boolean aktivuj) Alias pre uhlováRýchlosť.
-
rýchlosťOtáčania
public void rýchlosťOtáčania(double uhlováRýchlosť, boolean aktivuj) Alias pre uhlováRýchlosť.
-
rychlostOtacania
public void rychlostOtacania(double uhlováRýchlosť, boolean aktivuj) Alias pre uhlováRýchlosť.
-
maximálnaUhlováRýchlosť
public double maximálnaUhlováRýchlosť()
Zistí hodnotu maximálnej uhlovej
rýchlosti (maximálnej rýchlosti otáčania) tohto robota.
Kladné hodnoty znamenajú otáčanie robota doľava. Nula
znamená „bez obmedzenia.“- Návratová hodnota:
- maximálna uhlová rýchlosť tohto robota
-
maximalnaUhlovaRychlost
public double maximalnaUhlovaRychlost()
Alias pre maximálnaUhlováRýchlosť.
-
maximálnaRýchlosťOtáčania
public double maximálnaRýchlosťOtáčania()
Alias pre maximálnaUhlováRýchlosť.
-
maximalnaRychlostOtacania
public double maximalnaRychlostOtacania()
Alias pre maximálnaUhlováRýchlosť.
-
najväčšiaUhlováRýchlosť
public double najväčšiaUhlováRýchlosť()
Alias pre maximálnaUhlováRýchlosť.
-
najvacsiaUhlovaRychlost
public double najvacsiaUhlovaRychlost()
Alias pre maximálnaUhlováRýchlosť.
-
najväčšiaRýchlosťOtáčania
public double najväčšiaRýchlosťOtáčania()
Alias pre maximálnaUhlováRýchlosť.
-
najvacsiaRychlostOtacania
public double najvacsiaRychlostOtacania()
Alias pre maximálnaUhlováRýchlosť.
-
maximálnaUhlováRýchlosť
public void maximálnaUhlováRýchlosť(double maximálnaUhlováRýchlosť)
Nastaví novú hodnotu maximálnej
uhlovej rýchlosti (rýchlosti otáčania). Touto hodnotou bude
limitovaná rýchlosť
otáčania robota v kladom i zápornom smere. Kladné hodnoty
znamenajú otáčanie robota doľava. Nulová maximálna uhlová
rýchlosť znamená „bez obmedzenia.“- Parametre:
maximálnaUhlováRýchlosť– nová hodnota maximálnej uhlovej rýchlosti
-
maximalnaUhlovaRychlost
public void maximalnaUhlovaRychlost(double maximálnaUhlováRýchlosť)
Alias pre maximálnaUhlováRýchlosť.
-
maximálnaRýchlosťOtáčania
public void maximálnaRýchlosťOtáčania(double maximálnaUhlováRýchlosť)
Alias pre maximálnaUhlováRýchlosť.
-
maximalnaRychlostOtacania
public void maximalnaRychlostOtacania(double maximálnaUhlováRýchlosť)
Alias pre maximálnaUhlováRýchlosť.
-
najväčšiaUhlováRýchlosť
public void najväčšiaUhlováRýchlosť(double najväčšiaUhlováRýchlosť)
Alias pre maximálnaUhlováRýchlosť.
-
najvacsiaUhlovaRychlost
public void najvacsiaUhlovaRychlost(double najväčšiaUhlováRýchlosť)
Alias pre maximálnaUhlováRýchlosť.
-
najväčšiaRýchlosťOtáčania
public void najväčšiaRýchlosťOtáčania(double najväčšiaRýchlosťOtáčania)
Alias pre maximálnaUhlováRýchlosť.
-
najvacsiaRychlostOtacania
public void najvacsiaRychlostOtacania(double najväčšiaRýchlosťOtáčania)
Alias pre maximálnaUhlováRýchlosť.
-
zrýchlenie
public double zrýchlenie()
Zistí hodnotu zrýchlenia tohto robota. Nenulová
hodnota ešte neznamená, že robot sa pohybuje. Pohybujú sa
len aktívne roboty.- Návratová hodnota:
- zrýchlenie tohto robota
-
zrychlenie
public double zrychlenie()
Alias pre zrýchlenie.
-
zrýchlenie
public void zrýchlenie(double zrýchlenie)
Nastaví robotu novú hodnotu
zrýchlenia. V prípade zadania nenulovej hodnoty, je robot
automaticky aktivovaný, aby sa
mohol začať pohybovať. Ak má robot nastavenú maximálnu rýchlosť, bude
zrýchľovať až kým ju nedosiahne, inak bude zrýchľovať
donekonečna. Ak majú hodnoty rýchlosti a zrýchlenia rôzne znamienka, robot postupne
spomaľuje a keď dosiahne hranicu nulovej rýchlosti, tak sa
buď zastaví (ak má prikázané zastaviť po spomalení), alebo sa
začne pohybovať opačným smerom (t. j. ak išiel dopredu,
začne cúvať a naopak).- Parametre:
zrýchlenie– nová hodnota zrýchlenia
-
zrychlenie
public void zrychlenie(double zrýchlenie)
Alias pre zrýchlenie.
-
zrýchlenie
public void zrýchlenie(double zrýchlenie, boolean aktivuj)Metóda funguje rovnako ako metóda
zrýchlenie(double zrýchlenie), ale dovoľuje programátorovi určiť, či smie byť robot (v prípade zadania nenulového zrýchlenia) aktivovaný.- Parametre:
zrýchlenie– nová hodnota zrýchleniaaktivuj– ak jetruea zadaná hodnota zrýchlenia je nenulová, robot je aktivovaný
-
zrychlenie
public void zrychlenie(double zrýchlenie, boolean aktivuj) Alias pre zrýchlenie.
-
zrýchleniePosunu
public double zrýchleniePosunu()
Zistí hodnotu zrýchlenia posunu tohto robota.
(Je to zrýchlenie v smere kolmom na aktuálny smer robota. Pozri aj rýchlosťPosunu.) Nenulová hodnota
automaticky neznamená, že sa robot pohybuje. Pohybujú sa
len aktívne roboty.- Návratová hodnota:
- zrýchlenie posunu tohto robota
-
zrychleniePosunu
public double zrychleniePosunu()
Alias pre zrýchleniePosunu.
-
zrýchleniePosunu
public void zrýchleniePosunu(double zrýchleniePosunu)
Nastaví robotu novú hodnotu
zrýchlenia posunu. V prípade zadania nenulovej hodnoty,
je robot automaticky aktivovaný,
aby sa mohol začať pohybovať. Ak má robot nastavenú
maximálnu
rýchlosť posunu, bude zrýchľovať až kým ju nedosiahne,
inak bude zrýchľovať donekonečna. Ak majú hodnoty
rýchlosti posunu
a zrýchlenia rôzne znamienka, tak robot postupne
spomaľuje a keď dosiahne hranicu nulovej rýchlosti, tak
sa buď zastaví (ak má prikázané zastaviť po spomalení posunu),
alebo sa začne pohybovať opačným smerom.- Parametre:
zrýchleniePosunu– nová hodnota zrýchlenia posunu
-
zrychleniePosunu
public void zrychleniePosunu(double zrýchleniePosunu)
Alias pre zrýchleniePosunu.
-
zrýchleniePosunu
public void zrýchleniePosunu(double zrýchleniePosunu, boolean aktivuj)Metóda funguje rovnako ako metóda
zrýchleniePosunu(double zrýchlenie), ale dovoľuje programátorovi určiť, či smie byť robot (v prípade zadania nenulového zrýchlenia posunu) aktivovaný.- Parametre:
zrýchleniePosunu– nová hodnota zrýchlenia posunuaktivuj– ak jetruea zadaná hodnota zrýchlenia posunu je nenulová, tak je robot aktivovaný
-
zrychleniePosunu
public void zrychleniePosunu(double zrýchleniePosunu, boolean aktivuj) Alias pre zrýchleniePosunu.
-
uhlovéZrýchlenie
public double uhlovéZrýchlenie()
Zistí hodnotu uhlového zrýchlenia (zrýchlenia
otáčania) tohto robota. Kladné hodnoty znamenajú otáčanie
robota doľava. Nenulová hodnota ešte neznamená, že robot
sa otáča. Pohybujú a otáčajú sa len aktívne roboty.- Návratová hodnota:
- uhlové zrýchlenie tohto robota
-
uhloveZrychlenie
public double uhloveZrychlenie()
Alias pre uhlovéZrýchlenie.
-
zrýchlenieOtáčania
public double zrýchlenieOtáčania()
Alias pre uhlovéZrýchlenie.
-
zrychlenieOtacania
public double zrychlenieOtacania()
Alias pre uhlovéZrýchlenie.
-
uhlovéZrýchlenie
public void uhlovéZrýchlenie(double uhlovéZrýchlenie)
Nastaví robotu novú hodnotu
uhlového zrýchlenia (zrýchlenia otáčania). V prípade
zadania nenulovej hodnoty, je robot automaticky
aktivovaný, aby sa mohol začať
otáčať. Ak má robot nastavenú maximálnu uhlovú
rýchlosť, bude zvyšovať rýchlosť otáčania až kým
nedosiahne stanovenú hranicu, inak bude zrýchľovať
donekonečna. Ak majú hodnoty rýchlosti otáčania a uhlového
zrýchlenia rôzne znamienka, robot bude postupne znižovať
rýchlosť otáčania, kým sa nezačne otáčať opačným smerom.- Parametre:
uhlovéZrýchlenie– nová hodnota uhlového zrýchlenia (zrýchlenia otáčania)
-
uhloveZrychlenie
public void uhloveZrychlenie(double uhlovéZrýchlenie)
Alias pre uhlovéZrýchlenie.
-
zrýchlenieOtáčania
public void zrýchlenieOtáčania(double uhlovéZrýchlenie)
Alias pre uhlovéZrýchlenie.
-
zrychlenieOtacania
public void zrychlenieOtacania(double uhlovéZrýchlenie)
Alias pre uhlovéZrýchlenie.
-
uhlovéZrýchlenie
public void uhlovéZrýchlenie(double uhlovéZrýchlenie, boolean aktivuj)Metóda funguje rovnako ako metóda
uhlovéZrýchlenie(double uhlovéZrýchlenie), ale dovoľuje programátorovi určiť, či smie byť robot (v prípade zadania nenulového zrýchlenia) aktivovaný.- Parametre:
uhlovéZrýchlenie– nová hodnota uhlového zrýchlenia (zrýchlenia otáčania)aktivuj– ak jetruea zadaná hodnota uhlového zrýchlenia je nenulová, robot je aktivovaný
-
uhloveZrychlenie
public void uhloveZrychlenie(double uhlovéZrýchlenie, boolean aktivuj) Alias pre uhlovéZrýchlenie.
-
zrýchlenieOtáčania
public void zrýchlenieOtáčania(double uhlovéZrýchlenie, boolean aktivuj) Alias pre uhlovéZrýchlenie.
-
zrychlenieOtacania
public void zrychlenieOtacania(double uhlovéZrýchlenie, boolean aktivuj) Alias pre uhlovéZrýchlenie.
-
rozbehniSa
public void rozbehniSa()
Metóda slúži na aktiváciu robota, ktorý má nenulové zrýchlenie. Ak má robot nulové zrýchlenie, tak volanie tejto metódy nemá žiadny efekt. (To znamená, že zrýchlenie robota je treba nastaviť vopred.) Vo vyšších verziách programovacieho rámca bolo správanie tejto metódy upravené tak, aby sa robot vždy rozbiehal dopredu (to znamená, že ak je zrýchlenie robota v čase volania tejto metódy záporné, upraví sa automaticky na kladné), zároveň bola pridaná metóda
začniCúvať… Vlastnosť rýchlosti posunu bola pridaná v ešte neskorších verziách rámca a jej aspekty nie sú touto metódou ovplyvňované (to isté platí pri volaní metódyzačniCúvať).
-
začniCúvať
public void začniCúvať()
Metóda slúži na aktiváciu robota, ktorý má nenulové zrýchlenie. Ak má robot nulové zrýchlenie, tak volanie tejto metódy nemá žiadny efekt. (To znamená, že zrýchlenie robota je treba nastaviť vopred.) Ak je zrýchlenie robota v čase volania tejto metódy kladné, upraví sa automaticky na záporné. Táto metóda bola pridaná do vyšších verzií programovacieho rámca ako protipól metódy
rozbehniSa. Vlastnosť rýchlosti posunu bola pridaná v ešte neskorších verziách rámca a jej aspekty nie sú touto metódou ovplyvňované.- Pozri tiež:
rozbehniSa(),zabrzdi()
-
zacniCuvat
public void zacniCuvat()
Alias pre začniCúvať.
-
rozbehniSa
public void rozbehniSa(double zrýchlenie)
Metóda nastaví robotu zadané zrýchlenie a v prípade zadania nenulovej hodnoty automaticky aktivuje robot.
- Parametre:
zrýchlenie– nová hodnota zrýchlenia- Pozri tiež:
začniCúvať(),zabrzdi(double),rozbehniSa(),rozbehniSa(double, double),rozbehniSa(double, boolean),rozbehniSa(double, double, boolean)
-
rozbehniSa
public void rozbehniSa(double zrýchlenie, double maximálnaRýchlosť)Metóda nastaví robotu nové hodnoty zrýchlenia a maximálnej rýchlosti a v prípade zadania nenulovej hodnoty zrýchlenia automaticky aktivuje robot.
- Parametre:
zrýchlenie– nová hodnota zrýchleniamaximálnaRýchlosť– nová hodnota maximálnej rýchlosti- Pozri tiež:
zabrzdi(double),rozbehniSa(),rozbehniSa(double),rozbehniSa(double, boolean),rozbehniSa(double, double, boolean)
-
rozbehniSa
public void rozbehniSa(double zrýchlenie, boolean aktivuj)Metóda nastaví robotu zadané zrýchlenie a zároveň dovoľuje programátorovi určiť, či má byť robot v prípade zadania nenulovej hodnoty zrýchlenia automaticky aktivovaný.
- Parametre:
zrýchlenie– nová hodnota zrýchleniaaktivuj– ak jetrue, automaticky aktivuje robot pri zadaní nenulového zrýchlenia- Pozri tiež:
zabrzdi(double),rozbehniSa(),rozbehniSa(double),rozbehniSa(double, double),rozbehniSa(double, double, boolean)
-
rozbehniSa
public void rozbehniSa(double zrýchlenie, double maximálnaRýchlosť, boolean aktivuj)Metóda nastaví robotu nové hodnoty zrýchlenia a maximálnej rýchlosti a dovoľuje programátorovi určiť, či má byť robot v prípade zadania nenulovej hodnoty zrýchlenia automaticky aktivovaný.
- Parametre:
zrýchlenie– nová hodnota zrýchleniamaximálnaRýchlosť– nová hodnota maximálnej rýchlostiaktivuj– ak jetrue, automaticky aktivuje robot pri zadaní nenulového zrýchlenia- Pozri tiež:
zabrzdi(double),rozbehniSa(),rozbehniSa(double),rozbehniSa(double, double),rozbehniSa(double, boolean)
-
zabrzdi
public void zabrzdi()
Prikáže robotu začať brzdiť a automaticky zastaviť pri dosiahnutí nulovej rýchlosti. Metóda vyžaduje, aby robot mal určitú úroveň zrýchlenia (kladnú alebo zápornú)! Keď robot nie je aktívny alebo má nulové zrýchlenie, tak nemá volanie tejto metódy žiadny efekt. V opačnom prípade je vektor zrýchlenia robota upravený správnym smerom – keď robot cúva, tak je jeho zrýchlenie nastavené na kladnú hodnotu, keď sa pohybuje smerom dopredu, tak na zápornú. Vlastnosť rýchlosti posunu bola do programovacieho rámca pridaná v neskorších verziách a jej aspekty nie sú touto metódou ovplyvňované. (Pozri
zastavPosun.)Pozor! Pozor na podobnosť názvu s metódou
zastav, ktorá má na starosti deaktiváciu robota (napríklad po dosiahnutí cieľa)…- Pozri tiež:
rozbehniSa(),začniCúvať(),zabrzdi(double),zastavPosun()
-
zabrzdi
public void zabrzdi(double zrýchlenie)
Prikáže robotu začať brzdiť so zadaným „zrýchlením“ (spomalením) a automaticky zastaviť pri dosiahnutí nulovej rýchlosti. Keď robot nie je aktívny alebo je zadané zrýchlenie rovné nule, tak nemá volanie metódy žiadny efekt. V opačnom prípade je vektor zrýchlenia robota upravený správnym smerom – keď robot práve cúva, tak je zrýchlenie nastavené na kladnú hodnotu, v opačných prípadoch na zápornú. Vlastnosť rýchlosti posunu bola do programovacieho rámca pridaná v neskorších verziách a jej aspekty nie sú touto metódou ovplyvňované. (Pozri
zastavPosun.)Pozor! Pozor na podobnosť názvu s metódou
zastav, ktorá má na starosti deaktiváciu robota (napríklad po dosiahnutí cieľa)…- Parametre:
zrýchlenie– nová hodnota zrýchlenia tohto robota (nesmie byť rovné nule)- Pozri tiež:
rozbehniSa(double),rozbehniSa(double, double),rozbehniSa(double, boolean),rozbehniSa(double, double, boolean),zabrzdi(),zastavPosun()
-
zastavíPoSpomalení
public boolean zastavíPoSpomalení()
Zistí, či má robot prikázané automaticky zastaviť pri najbližšom dosiahnutí nulovej rýchlosti.
- Návratová hodnota:
true– áno;false– nie
-
zastaviPoSpomaleni
public boolean zastaviPoSpomaleni()
Alias pre zastavíPoSpomalení.
-
zastavPoSpomalení
public void zastavPoSpomalení()
Prikáže robotu, aby najbližšie, keď dosiahne nulovú rýchlosť automaticky zastavil.
-
zastavPoSpomaleni
public void zastavPoSpomaleni()
Alias pre zastavPoSpomalení.
-
nezastavujPoSpomalení
public void nezastavujPoSpomalení()
Zruší príkaz robota, ktorý mu určoval, aby sa najbližšie, keď dosiahne nulovú rýchlosť automaticky zastavil.
-
nezastavujPoSpomaleni
public void nezastavujPoSpomaleni()
Alias pre nezastavujPoSpomalení.
-
zastavíPoSpomaleníPosunu
public boolean zastavíPoSpomaleníPosunu()
Zistí, či má robot prikázané automaticky zastaviť posun pri najbližšom dosiahnutí nulovej rýchlosti posunu.
- Návratová hodnota:
true– áno;false– nie
-
zastaviPoSpomaleniPosunu
public boolean zastaviPoSpomaleniPosunu()
Alias pre zastavíPoSpomaleníPosunu.
-
zastavPoSpomaleníPosunu
public void zastavPoSpomaleníPosunu()
Prikáže robotu, aby najbližšie, keď dosiahne nulovú rýchlosť posunu automaticky zastavil posun. Táto akcia automaticky nastaví nulové zrýchlenie posunu.
-
zastavPoSpomaleniPosunu
public void zastavPoSpomaleniPosunu()
Alias pre zastavPoSpomaleníPosunu.
-
nezastavujPoSpomaleníPosunu
public void nezastavujPoSpomaleníPosunu()
Zruší robotu príkaz, ktorý mu určoval, aby sa najbližšie, keď dosiahne nulovú rýchlosť posunu automaticky posun zastavil (s nastavením nulového zrýchlenia posunu).
-
nezastavujPoSpomaleniPosunu
public void nezastavujPoSpomaleniPosunu()
Alias pre nezastavujPoSpomaleníPosunu.
-
cieľAktívny
public boolean cieľAktívny()
Zistí, či je robot práve v režime smerovania do cieľa.
- Návratová hodnota:
true– áno;false– nie
-
cielAktivny
public boolean cielAktivny()
Alias pre cieľAktívny.
-
smerujeDoCieľa
public boolean smerujeDoCieľa()
Alias pre cieľAktívny.
-
smerujeDoCiela
public boolean smerujeDoCiela()
Alias pre cieľAktívny.
-
cieľX
public double cieľX()
Vráti x-ovú súradnicu naposledy definovaného cieľa.
-
cielX
public double cielX()
Alias pre cieľX.
-
cieľY
public double cieľY()
Vráti y-ovú súradnicu naposledy definovaného cieľa.
-
cielY
public double cielY()
Alias pre cieľY.
-
cieľ
public Bod cieľ()
Vráti polohu naposledy definovaného cieľa.
-
zastavíVCieli
public boolean zastavíVCieli()
Zistí, či má robot prikázané automaticky zastaviť po dosiahnutí cieľa.
- Návratová hodnota:
true– áno;false– nie
-
zastaviVCieli
public boolean zastaviVCieli()
Alias pre zastavíVCieli.
-
zrušCieľ
public void zrušCieľ()
Vypne smerovanie do cieľa, ktoré bolo zapnuté niektorou z verzií metódy
cieľ. Robot je automaticky deaktivovaný rovnakým spôsobom ako pri metódezastav. Ak je automatická deaktivácia nežiaduca, tak treba použiť verziu metódyzrušCieľ(zastav)s argumentomzastavrovnýmfalse.- Pozri tiež:
cieľ(double, double),zrušCieľ(boolean)
-
zrusCiel
public void zrusCiel()
Alias pre zrušCieľ.
-
zrušSledovanieCieľa
public void zrušSledovanieCieľa()
Alias pre zrušCieľ.
-
zrusSledovanieCiela
public void zrusSledovanieCiela()
Alias pre zrušCieľ.
-
zrušCieľ
public void zrušCieľ(boolean zastav)
Vypne smerovanie do cieľa, ktoré bolo zapnuté niektorou z verzií metódy
cieľ. Parameterzastavdovoľuje programátorovi rozhodnúť, či má alebo nemá robot zostať aktívny.- Parametre:
zastav– ak jetrue, tak je robot deaktivovaný rovnakým spôsobom ako pri volaní metódyzastav(bez argumentu).- Pozri tiež:
cieľ(double, double),zrušCieľ()
-
zrusCiel
public void zrusCiel(boolean zastav)
Alias pre zrušCieľ.
-
zrušSledovanieCieľa
public void zrušSledovanieCieľa(boolean zastav)
Alias pre zrušCieľ.
-
zrusSledovanieCiela
public void zrusSledovanieCiela(boolean zastav)
Alias pre zrušCieľ.
-
cieľ
public void cieľ(double x, double y)Zapne automatické smerovanie do cieľa. Počas tejto činnosti je robot automaticky otáčaný smerom na cieľové súradnice (buď s ohľadom na aktuálnu rýchlosť otáčania, alebo okamžite) a v prípade, že má robot nenulovú rýchlosť (prípadne zrýchlenie), pohybuje sa stanoveným smerom. Po dosiahnutí cieľa robot automaticky zastaví. Metóda vynúti spustenie robota. Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
x– x-ová súradnica cieľay– y-ová súradnica cieľa
-
ciel
public void ciel(double x, double y) Alias pre cieľ.
-
cieľ
public void cieľ(double x, double y, boolean spusti)Metóda má rovnaký účel ako metóda
cieľ(x, y)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný).Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
x– x-ová súradnica cieľay– y-ová súradnica cieľaspusti– ak je rovnétrue, je vynútené spustenie a zároveň je robotu prikázané, aby zastavil v cieli
-
ciel
public void ciel(double x, double y, boolean spusti) Alias pre cieľ.
-
cieľ
public void cieľ(double x, double y, boolean spusti, boolean zastavVCieli)Metóda má rovnaký účel ako metóda
cieľ(x, y)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný) a či má zastaviť po dosiahnutí cieľa.Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
x– x-ová súradnica cieľay– y-ová súradnica cieľaspusti– ak je rovnétrue, je vynútené spustenie robotazastavVCieli– určuje, či má robot automaticky zastaviť v cieli
-
ciel
public void ciel(double x, double y, boolean spusti, boolean zastavVCieli) Alias pre cieľ.
-
cieľ
public void cieľ(Poloha objekt)
Zapne automatické smerovanie do cieľa. Metóda vynúti spustenie robota. Za nový cieľ sú zvolené aktuálne súradnice zadaného objektu a tie ním zostávajú, dokedy nie je určené inak. Keď chceme sledovať pohybujúci sa robot, musíme cieľ pravidelne aktualizovať metódou
upravCieľ.Počas činnosti smerovania na cieľ je robot automaticky otáčaný smerom na cieľové súradnice (buď s ohľadom na aktuálnu rýchlosť otáčania, alebo okamžite) a v prípade, že má robot nenulovú rýchlosť (prípadne zrýchlenie), pohybuje sa stanoveným smerom. Po dosiahnutí cieľa robot automaticky zastaví.
Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
objekt– objekt, ktorého poloha v čase volania tejto metódy je zvolená za nový cieľ; ak jenull, smerovanie do cieľa je zrušené
-
cieľ
public void cieľ(Poloha objekt, boolean spusti)
Metóda má rovnaký účel ako metóda
cieľ(Poloha)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť tento robot automaticky spustený (aktivovaný).Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
objekt– objekt, ktorého poloha v čase volania tejto metódy je zvolená za nový cieľ; ak jenull, smerovanie do cieľa je zrušenéspusti– ak je rovnétrue, je vynútené spustenie a zároveň je robotu prikázané, aby zastavil v cieli
-
cieľ
public void cieľ(Poloha objekt, boolean spusti, boolean zastavVCieli)
Metóda má rovnaký účel ako metóda
cieľ(Poloha)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť tento robot automaticky spustený (aktivovaný) a či má zastaviť po dosiahnutí cieľa.Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
objekt– objekt, ktorého poloha v čase volania tejto metódy je zvolená za nový cieľ; ak jenull, smerovanie do cieľa je zrušenéspusti– ak je rovnétrue, je vynútené spustenie robotazastavVCieli– určuje, či má robot automaticky zastaviť v cieli
-
cieľ
public void cieľ(Shape tvar)
Zapne automatické smerovanie do cieľa, ktorý je určený stredom hraníc[1] zadaného tvaru Javy (
Shape). Počas tejto činnosti je robot automaticky otáčaný smerom na cieľové súradnice (buď s ohľadom na aktuálnu rýchlosť otáčania, alebo okamžite) a v prípade, že má robot nenulovú rýchlosť (prípadne zrýchlenie), pohybuje sa stanoveným smerom. Po dosiahnutí cieľa robot automaticky zastaví. Metóda vynúti spustenie robota. Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
tvar– tvar, ktorého stred hraníc je zvolený za nový cieľ; ak jenull, smerovanie do cieľa je zrušené
-
cieľ
public void cieľ(Shape tvar, boolean spusti)
Metóda má rovnaký účel ako metóda
cieľ(tvar)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný).Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
tvar– tvar, ktorého stred hraníc je zvolený za nový cieľ; ak jenull, smerovanie do cieľa je zrušenéspusti– ak je rovnétrue, je vynútené spustenie a zároveň je robotu prikázané, aby zastavil v cieli
-
cieľ
public void cieľ(Shape tvar, boolean spusti, boolean zastavVCieli)
Metóda má rovnaký účel ako metóda
cieľ(tvar)(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný) a či má zastaviť po dosiahnutí cieľa.Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
tvar– tvar, ktorého stred hraníc je zvolený za nový cieľ; ak jenull, smerovanie do cieľa je zrušenéspusti– ak je rovnétrue, je vynútené spustenie robotazastavVCieli– určuje, či má robot automaticky zastaviť v cieli
-
cieľNaMyš
public void cieľNaMyš()
Zapne automatické smerovanie do cieľa, ktorý bude určený aktuálnymi súradnicami myši. Počas tejto činnosti je robot automaticky otáčaný smerom na cieľové súradnice (buď s ohľadom na aktuálnu rýchlosť otáčania, alebo okamžite) a v prípade, že má robot nenulovú rýchlosť (prípadne zrýchlenie), pohybuje sa stanoveným smerom. Po dosiahnutí cieľa robot automaticky zastaví. Metóda vynúti spustenie robota. Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
-
cielNaMys
public void cielNaMys()
Alias pre cieľNaMyš.
-
cieľNaMyš
public void cieľNaMyš(boolean spusti)
Metóda má rovnaký účel ako metóda
cieľNaMyš()(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný).- Parametre:
spusti– ak je rovnétrue, je vynútené spustenie a zároveň je robotu prikázané, aby zastavil v cieli
-
cielNaMys
public void cielNaMys(boolean spusti)
Alias pre cieľNaMyš.
-
cieľNaMyš
public void cieľNaMyš(boolean spusti, boolean zastavVCieli)Metóda má rovnaký účel ako metóda
cieľNaMyš()(pozri jej opis), ibaže umožňuje programátorovi určiť, či smie byť robot automaticky spustený (aktivovaný) a či má zastaviť po dosiahnutí cieľa.- Parametre:
spusti– ak je rovnétrue, je vynútené spustenie robotazastavVCieli– určuje, či má robot automaticky zastaviť v cieli
-
cielNaMys
public void cielNaMys(boolean spusti, boolean zastavVCieli) Alias pre cieľNaMyš.
-
upravCieľ
public void upravCieľ(double x, double y)Upraví tomuto robotu cieľ smerovania. Ak je smerovanie do cieľa aktívne, upraví cieľové súradnice a v prípade, že sa nové súradnice dostatočne prekrývajú s aktuálnou polohou robota ukočí smerovanie do cieľa. Ak smerovanie aktívne nie je, tak má volanie tejto metódy rovnaký efekt ako volanie metódy
cieľ(pozri jej opis).Poznámka: Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
x– nová x-ová súradnica cieľay– nová y-ová súradnica cieľa
-
upravCiel
public void upravCiel(double x, double y) Alias pre upravCieľ.
-
upravCieľ
public void upravCieľ(double x, double y, boolean spusti)Upraví tomuto robotu cieľ smerovania. Ak je smerovanie do cieľa aktívne, upraví cieľové súradnice a v prípade, že sa nové súradnice dostatočne prekrývajú s aktuálnou polohou robota ukočí smerovanie do cieľa. Ak smerovanie aktívne nie je, tak má volanie tejto metódy rovnaký efekt ako volanie metódy
cieľ.Poznámka: Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
x– nová x-ová súradnica cieľay– nová y-ová súradnica cieľaspusti– dovoľuje programátorovi rozhodnúť, či smie byť (v prípade, že smerovanie do cieľa nie je aktívne) automaticky volaná metódaspusti
-
upravCiel
public void upravCiel(double x, double y, boolean spusti) Alias pre upravCieľ.
-
upravCieľ
public void upravCieľ(Poloha objekt)
Upraví tomuto robotu cieľ smerovania. Ak je smerovanie do cieľa aktívne, upraví cieľové súradnice a v prípade, že sa nové súradnice dostatočne prekrývajú s aktuálnou polohou robota ukočí smerovanie do cieľa. Ak smerovanie aktívne nie je, tak má volanie tejto metódy rovnaký efekt ako volanie metódy
cieľ.Poznámka: Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
objekt– objekt, ktorého poloha bude použitá ako nový cieľ
-
upravCieľ
public void upravCieľ(Poloha objekt, boolean spusti)
Upraví tomuto robotu cieľ smerovania. Ak je smerovanie do cieľa aktívne, upraví cieľové súradnice a v prípade, že sa nové súradnice dostatočne prekrývajú s aktuálnou polohou robota ukočí smerovanie do cieľa. Ak smerovanie aktívne nie je, tak má volanie tejto metódy rovnaký efekt ako volanie metódy
cieľ.Poznámka: Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
objekt– objekt, ktorého poloha bude použitá ako nový cieľspusti– dovoľuje programátorovi rozhodnúť, či smie byť (v prípade, že smerovanie do cieľa nie je aktívne) automaticky volaná metódaspusti
-
upravCieľ
public void upravCieľ(Shape tvar)
Upraví tomuto robotu cieľ smerovania. Ak je smerovanie do cieľa aktívne, upraví cieľové súradnice smerom do stredu hraníc[1] zadaného tvaru, inak má rovnaký efekt ako volanie metódy
cieľ.[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
Poznámka: Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
tvar– tvar, ktorého súradnice stredu hraníc budú použité ako nový cieľ
-
upravCieľ
public void upravCieľ(Shape tvar, boolean spusti)
Upraví tomuto robotu cieľ smerovania. Ak je smerovanie do cieľa aktívne, upraví cieľové súradnice smerom do stredu hraníc[1] zadaného tvaru a v prípade, že sa nové súradnice dostatočne prekrývajú s aktuálnou polohou robota ukočí smerovanie do cieľa. Ak smerovanie aktívne nie je, tak má volanie tejto metódy rovnaký efekt ako volanie metódy
cieľ.[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
Poznámka: Vlastnosť rýchlosti posunu (ktorá bola v porovnaní s vlastnosťou smerovania do cieľa pridaná do programovacieho rámca omnoho neskôr) je pri smerovaní do cieľa úplne ignorovaná.
Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Parametre:
tvar– tvar, ktorého súradnice stredu hraníc budú použité ako nový cieľspusti– dovoľuje programátorovi rozhodnúť, či smie byť (v prípade, že smerovanie do cieľa nie je aktívne) automaticky volaná metódaspusti
-
upravCieľNaMyš
public void upravCieľNaMyš()
Upraví tomuto robotu cieľ smerovania. Ak je smerovanie do cieľa aktívne, upraví cieľové súradnice podľa aktuálnych súradníc myši a v prípade, že sa nové súradnice dostatočne prekrývajú s aktuálnou polohou robota ukočí smerovanie do cieľa. Ak smerovanie aktívne nie je, tak má volanie tejto metódy rovnaký efekt ako volanie metódy
cieľNaMyš(pozri jej opis).
-
upravCielNaMys
public void upravCielNaMys()
Alias pre upravCieľNaMyš.
-
upravCieľNaMyš
public void upravCieľNaMyš(boolean spusti)
Upraví tomuto robotu cieľ smerovania. Ak je smerovanie do cieľa aktívne, upraví cieľové súradnice podľa aktuálnych súradníc myši a v prípade, že sa nové súradnice dostatočne prekrývajú s aktuálnou polohou robota ukočí smerovanie do cieľa. Ak smerovanie aktívne nie je, tak má volanie tejto metódy rovnaký efekt ako volanie metódy
cieľNaMyš(pozri jej opis).- Parametre:
spusti– dovoľuje programátorovi rozhodnúť, či smie byť (v prípade, že smerovanie do cieľa nie je aktívne) automaticky volaná metódaspusti
-
upravCielNaMys
public void upravCielNaMys(boolean spusti)
Alias pre upravCieľNaMyš.
-
smerNaCieľ
public double smerNaCieľ()
Zistí smer (uhol) z aktuálneho miesta robota smerom k aktuálnym súradniciam cieľa. Ak sú súradnice cieľa zhodné so súradnicami robota, tak je vrátený uhol 360°. Pred volaním tejto metódy je vhodné metódou
cieľAktívnyoveriť, či je cieľ skutočne aktívny. Táto činnosť nie je vykonaná automaticky, pretože v niektorých prípadoch môže byť užitočné ignorovať to, či je cieľ aktívny, alebo nie.- Návratová hodnota:
- hodnota uhla určujúceho smer od robota k aktuálnym súradniciam cieľa
- Pozri tiež:
uholNaCieľ(),otočNaCieľ(),otočNaCieľ(double)
-
smerNaCiel
public double smerNaCiel()
Alias pre smerNaCieľ.
-
uholNaCieľ
public double uholNaCieľ()
Alias pre smerNaCieľ.
-
uholNaCiel
public double uholNaCiel()
Alias pre smerNaCieľ.
-
choďNaCieľ
public void choďNaCieľ()
Prikáže robotu, aby na podlahe (strope) prešiel na aktuálne súradnice cieľa. Keď je pero položené, tak kreslí čiaru. Robot nezmení smer, kam bol obrátený. Pred volaním tejto metódy je vhodné metódou
cieľAktívnyoveriť, či je cieľ skutočne aktívny. Táto činnosť nie je vykonaná automaticky, pretože v niektorých prípadoch môže byť užitočné ignorovať to, či je cieľ aktívny, alebo nie.Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Pozri tiež:
skočNaCieľ()
-
chodNaCiel
public void chodNaCiel()
Alias pre choďNaCieľ.
-
skočNaCieľ
public void skočNaCieľ()
Prikáže robotu, aby v rámci podlahy (stropu) preskočil na aktuálne súradnice cieľa. Robot nekreslí čiaru, ani nezmení smer, kam bol obrátený. Pred volaním tejto metódy je vhodné metódou
cieľAktívnyoveriť, či je cieľ skutočne aktívny. Táto činnosť nie je vykonaná automaticky, pretože v niektorých prípadoch môže byť užitočné ignorovať to, či je cieľ aktívny, alebo nie.Poznámka: Od verzie 2.23 je upravené správanie príchodu do cieľa tak, aby robot zastavil vtedy, keď je cieľ na dosah jeho rýchlosti. Ak je potrebné, aby cieľ dosiahol presne, treba to zariadiť ručne v reakcii
dosiahnutieCieľa. (Napríklad volaním metódychoďNaCieľaleboskočNaCieľ, prípadne konštrukciou:choďNa(cieľX(), cieľY());)- Pozri tiež:
choďNaCieľ()
-
skocNaCiel
public void skocNaCiel()
Alias pre skočNaCieľ.
-
otočNaCieľ
public void otočNaCieľ()
Nasmeruje robot smerom na aktuálne súradnice cieľa. Ak sú súradnice cieľa zhodné so súradnicami robota, tak sa smer robota sa nezmení. Inak je vypočítaný uhol smeru medzi aktuálnou polohou robota a polohou cieľa, ktorý je použitý na nasmerovanie robota. Pred volaním tejto metódy je vhodné metódou
cieľAktívnyoveriť, či je cieľ skutočne aktívny. Táto činnosť nie je vykonaná automaticky, pretože v niektorých prípadoch môže byť užitočné ignorovať to, či je cieľ aktívny, alebo nie.- Pozri tiež:
smerNaCieľ()
-
otocNaCiel
public void otocNaCiel()
Alias pre otočNaCieľ.
-
otočNaCieľ
public void otočNaCieľ(double najviacO)
Funguje podobne ako metóda
otočNaCieľ, ibaže obmedzuje uhol pootočenia – neotočí robot okamžite smerom k súradniciam cieľa, iba ho pootočí stanoveným smerom o maximálnu zadanú hodnotu uhla. Pred volaním tejto metódy je vhodné metódoucieľAktívnyoveriť, či je cieľ skutočne aktívny. Táto činnosť nie je vykonaná automaticky, pretože v niektorých prípadoch môže byť užitočné ignorovať to, či je cieľ aktívny, alebo nie.- Parametre:
najviacO– maximálna hodnota uhla, o ktorú sa môže robot pootočiť smerom k aktuálnym súradniciam cieľa- Pozri tiež:
smerNaCieľ()
-
otocNaCiel
public void otocNaCiel(double najviacO)
Alias pre otočNaCieľ.
-
vytvorDráhu
public Zoznam<Bod> vytvorDráhu()
Vytvorí z aktuálnej cesty dráhu so zrnitosťou rovnou hodnote aktuálnej rýchlosti robota. Metóda vypočíta body dráhy tak, aby vzdialenosť medzi nimi bola čo najbližšie k hodnote rýchlosti (podľa ktorej bola určená zrnitosť dráhy).
- Pozri tiež:
cesta(),rýchlosť(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
vytvorDrahu
public Zoznam<Bod> vytvorDrahu()
Alias pre vytvorDráhu.
-
vytvorDráhu
public Zoznam<Bod> vytvorDráhu(double zrnitosť)
Vytvorí z aktuálnej cesty dráhu so zadanou zrnitosťou. Metóda vypočíta body dráhy tak, aby vzdialenosť medzi nimi bola čo najbližšie k zadanej zrnitosti.
- Parametre:
zrnitosť– určuje približnú vzdialenosť medzi bodmi dráhy- Pozri tiež:
cesta(),vytvorDráhu(),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
vytvorDrahu
public Zoznam<Bod> vytvorDrahu(double zrnitosť)
Alias pre vytvorDráhu.
-
vytvorDráhu
public Zoznam<Bod> vytvorDráhu(Shape tvar)
Vytvorí zo zadaného tvaru dráhu so zrnitosťou rovnou hodnote aktuálnej rýchlosti robota. Metóda vypočíta body dráhy tak, aby vzdialenosť medzi nimi bola čo najbližšie k hodnote rýchlosti (podľa ktorej bola určená zrnitosť dráhy).
- Pozri tiež:
rýchlosť(),vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
vytvorDrahu
public Zoznam<Bod> vytvorDrahu(Shape tvar)
Alias pre vytvorDráhu.
-
vytvorDráhu
public Zoznam<Bod> vytvorDráhu(Shape tvar, double zrnitosť)
Vytvorí zo zadaného tvaru dráhu so zadanou zrnitosťou. Dráha by mala byť otvorená cesta, inak nie je isté to, kde presne robot začne (a kde skončí). Avšak ak na tom nezáleží (ak je dôležité len to, aby sa robot pohyboval po stanovenej dráhe), tak nie je nevyhnutné túto podmienku dodržať. Metóda vypočíta body dráhy tak, aby vzdialenosť medzi nimi bola čo najbližšie k zadanej zrnitosti.
- Parametre:
tvar– určuje tvar dráhyzrnitosť– určuje približnú vzdialenosť medzi bodmi dráhy- Návratová hodnota:
- zoznam bodov tvoriacich aktuálnu (novú) dráhu robota
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
vytvorDrahu
public Zoznam<Bod> vytvorDrahu(Shape tvar, double zrnitosť)
Alias pre vytvorDráhu.
-
dráha
public Zoznam<Bod> dráha()
Vráti zoznam bodov tvoriaci
aktuálnu dráhu.- Návratová hodnota:
- zoznam bodov tvoriacich aktuálnu dráhu
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
dráha
public void dráha(Vector<Bod> nováDráha)
Nastaví aktuálnu dráhu podľa zadaného
zoznamu. Hodnota nullznamená vymazanie aktuálnej dráhy. Táto akcia má za následok vymazanie všetkých kľúčových fáz dráhy.- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
obráťDráhu
public void obráťDráhu()
Prevráti poradie bodov dráhy.
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
obratDrahu
public void obratDrahu()
Alias pre obráťDráhu.
-
posuňDráhu
public void posuňDráhu(double Δx, double Δy)Posunie body dráhy o zadaný rozdiel súradníc Δx a Δy.
Táto metóda má dve verzie, ktoré však fungujú úplne odlišne. Toto je verzia, ktorá prijíma dva argumenty a posúva súradnice jednotlivých bodov dráhy. Ďalšia verzia prijíma jeden argument a tá posúva prvky dráhy, čo má zmysel najmä pri uzavretých dráhach, ktorým chceme posunúť začiatočný a koncový bod robota.
- Parametre:
Δx– posunutie bodov v smere osi xΔy– posunutie bodov v smere osi y- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
posunDrahu
public void posunDrahu(double Δx, double Δy) Alias pre posuňDráhu.
-
posuňDráhu
public void posuňDráhu(int početPrvkov)
Posunie prvky v zozname bodov dráhy o zadaný počet doprava (pri zadaní kladného počtu prvkov) alebo doľava (pri zadaní záporného počtu prvkov). Prvky, ktoré sú pri posúvaní sa doprava na konci zoznamu sa ocitnú na jeho začiatku a naopak. Tým je ovplyvnené posunutie začiatočného a koncového bodu dráhy robota.
Táto metóda má dve verzie, ktoré však fungujú úplne odlišne. Toto je verzia, ktorá prijíma jeden argument a posúva prvky v zozname bodov dráhy, čo má zmysel najmä pri uzavretých dráhach, ktorým chceme posunúť začiatočný a koncový bod robota. Ďalšia verzia prijíma dva argumenty a tá posúva súradnice jednotlivých bodov dráhy.
- Parametre:
početPrvkov– počet prvkov, o ktorý má byť dráha posunutá- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
posunDrahu
public void posunDrahu(int početPrvkov)
Alias pre posuňDráhu.
-
vytvorMapuSmerov
public Zoznam<Double> vytvorMapuSmerov()
Vytvorí z aktuálnej cesty dráhu so zrnitosťou rovnou hodnote aktuálnej rýchlosti robota a z nej vytvorí mapu smerov, ktoré budú použité pri pohybe robota po jeho aktuálne dráhe. Tvar cesty slúžiaci na vytvorenie mapy smerov nemusí byť totožný s tvarom cesty, ktorý slúžil na vytvorenie dráhy.
- Pozri tiež:
cesta(),rýchlosť(),vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
vytvorMapuSmerov
public Zoznam<Double> vytvorMapuSmerov(double zrnitosť)
Vytvorí z aktuálnej cesty dráhu so zadanou zrnitosťou a z nej vytvorí mapu smerov, ktoré budú použité pri pohybe robota po jeho aktuálne dráhe. Tvar cesty slúžiaci na vytvorenie mapy smerov nemusí byť totožný s tvarom cesty, ktorý slúžil na vytvorenie dráhy.
- Parametre:
zrnitosť– určuje približnú vzdialenosť medzi bodmi dráhy- Pozri tiež:
cesta(),vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
vytvorMapuSmerov
public Zoznam<Double> vytvorMapuSmerov(Shape tvar)
Vytvorí zo zadaného tvaru dráhu so zrnitosťou rovnou hodnote aktuálnej rýchlosti robota a z nej vytvorí mapu smerov, ktoré budú použité pri pohybe robota po jeho aktuálne dráhe. Tvar slúžiaci na vytvorenie mapy smerov nemusí byť totožný s tvarom, ktorý slúžil na vytvorenie dráhy.
- Pozri tiež:
rýchlosť(),vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
vytvorMapuSmerov
public Zoznam<Double> vytvorMapuSmerov(Shape tvar, double zrnitosť)
Vytvorí zo zadaného tvaru dráhu so zadanou zrnitosťou a z nej vytvorí mapu smerov, ktoré budú použité pri pohybe robota po jeho aktuálne dráhe. Tvar slúžiaci na vytvorenie mapy smerov nemusí byť totožný s tvarom, ktorý slúžil na vytvorenie dráhy.
- Parametre:
tvar– určuje tvar, podľa ktorého bude vytvorená mapa smerovzrnitosť– určuje približnú vzdialenosť medzi bodmi dráhy- Návratová hodnota:
- zoznam hodnôt tvoriacich mapu smerov
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
mapaSmerov
public Zoznam<Double> mapaSmerov()
Vráti zoznam hodnôt tvoriaci aktuálnu mapu
smerov.- Návratová hodnota:
- zoznam hodnôt tvoriacich mapu smerov
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
mapaSmerov
public void mapaSmerov(Vector<Double> nováMapaSmerov)
Nastaví aktuálnu mapu smerov podľa zadaného
zoznamu. Hodnota nullznamená vymazanie aktuálnej mapy smerov.- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
obráťMapuSmerov
public void obráťMapuSmerov()
Prevráti poradie prvkov mapy smerov.
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
obratMapuSmerov
public void obratMapuSmerov()
Alias pre obráťDráhu.
-
pootočMapuSmerov
public void pootočMapuSmerov(double uhol)
Pootočí hodnoty v mape smerov o zadaný uhol.
- Parametre:
uhol– uhol pootočenia hodnôt mapy smerov- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
pootocMapuSmerov
public void pootocMapuSmerov(double uhol)
Alias pre pootočMapuSmerov.
-
posuňMapuSmerov
public void posuňMapuSmerov(int početPrvkov)
Posunie prvky mapy smerov o zadanú hodnotu doprava. (pri zadaní kladnej hodnoty) alebo doľava (pri zadaní zápornej hodnoty). Prvky, ktoré sú pri posúvaní sa doprava na konci zoznamu sa ocitnú na jeho začiatku a naopak.
- Parametre:
početPrvkov– počet prvkov, o ktorý má byť mapa smerov posunutá- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
posunMapuSmerov
public void posunMapuSmerov(int početPrvkov)
Alias pre posuňMapuSmerov.
-
kráčajPoDráhe
public void kráčajPoDráhe()
Aktivuje robot a zaháji jeho pohyb po aktuálnej dráhe.
Príklad:
importknižnica.*;publicclassTestKráčajPoDráheextendsGRobot{privateTestKráčajPoDráhe() {super(400,400);zdvihniPero();uhol(80);skočNa(-170, -80);začniCestu();choďPoOblúku(90,100);dopredu(120);choďPoOblúku(90, -100);vytvorDráhu(8);domov(); }@Overridepublicvoidklik() {kráčajPoDráhe(); }@OverridepublicvoidkráčaniePoDráhe() {náhodnáFarba();kružnica(Svet.náhodnéReálneČíslo(1.5,4)); }publicstaticvoidmain(String[] args) {newTestKráčajPoDráhe(); } }Výsledok:
Po kliknutí myšou začne robot kráčať po vopred vytvorenej dráhe a zanechá pri tom náhodnú farebnú stopu.- Pozri tiež:
aktivuj(),vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
kracajPoDrahe
public void kracajPoDrahe()
Alias pre kráčajPoDráhe.
-
zastavNaDráhe
public void zastavNaDráhe()
Deaktivuje robot a ukončí jeho pohyb po dráhe.
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
zastavNaDrahe
public void zastavNaDrahe()
Alias pre zastavNaDráhe.
-
pokračujVDráhe
public void pokračujVDráhe()
Obnoví pohyb robota po aktuálnej dráhe. Ak sa robot práve nenachádza na dráhe, tak metóda nájde najbližší bod na dráhe a presunie ho tam.
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
pokracujVDrahe
public void pokracujVDrahe()
Alias pre pokračujVDráhe.
-
označKľúčovúFázuDráhy
public void označKľúčovúFázuDráhy(int fáza)
Označí zadanú fázu dráhy za kľúčovú. V kľúčových fázach je spúšťaná metóda
vstupDoKľúčovejFázyDráhy(int fáza)namiesto metódykráčaniePoDráhe().- Parametre:
fáza– index fázy, ktorá má byť označená za kľúčovú- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
oznacKlucovuFazuDrahy
public void oznacKlucovuFazuDrahy(int fáza)
Alias pre označKľúčovúFázuDráhy.
-
zrušKľúčovúFázuDráhy
public void zrušKľúčovúFázuDráhy(int fáza)
Zruší označenie zadanej fázy dráhy za kľúčové.
- Parametre:
fáza– index kľúčovej fázy, ktorá má byť zrušená- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
zrusKlucovuFazuDrahy
public void zrusKlucovuFazuDrahy(int fáza)
Alias pre zrušKľúčovúFázuDráhy.
-
označKľúčovúFázuDráhy
public void označKľúčovúFázuDráhy(Poloha poloha)
Označí takú fázu dráhy za kľúčovú, ktorej poloha je najbližšie k zadanej polohe. Pri vyhľadávaní vhodnej fázy na označenie sú brané do úvahy len tie fázy, ktoré nie sú označené a označená je potom taká fáza, ktorá ešte nebola označená a leží najbližšie k zadanej polohe. To znamená, že pri dostatočnom počte opakovaní pokusov o označenie by nakoniec boli označené všetky fázy dráhy. V kľúčových fázach je spúšťaná metóda
vstupDoKľúčovejFázyDráhy(int fáza)namiesto metódykráčaniePoDráhe().- Parametre:
fáza– približná poloha fázy, ktorá má byť označená za kľúčovú- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
oznacKlucovuFazuDrahy
public void oznacKlucovuFazuDrahy(Poloha poloha)
Alias pre označKľúčovúFázuDráhy.
-
zrušKľúčovúFázuDráhy
public void zrušKľúčovúFázuDráhy(Poloha poloha)
Zruší označenie takej fázy dráhy za kľúčové, ktorej poloha je najbližšie k zadanej polohe, pričom sú počas hľadania vhodnej fázy na zrušenie brané do úvahy len už označené fázy. To znamená, že ak jestvuje aspoň jedna kľúčová fáza v dráhe, tak s istotou nastane jedno zrušenie – tej označenej fázy, ktorá bude najbližšie k zadanej polohe.
- Parametre:
fáza– približná poloha kľúčovej fázy, ktorá má byť zrušená- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
zrusKlucovuFazuDrahy
public void zrusKlucovuFazuDrahy(Poloha poloha)
Alias pre zrušKľúčovúFázuDráhy.
-
označKľúčovúFázuDráhy
public void označKľúčovúFázuDráhy(Poloha poloha, double okruh)
Označí takú fázu dráhy za kľúčovú, ktorej poloha je najbližšie k zadanej polohe a v rámci zadaného okruhu. Pri vyhľadávaní vhodnej fázy na označenie sú brané do úvahy len tie fázy, ktoré nie sú označené a sú bližšie než zadaná maximálna vzdialenosť. Označená je potom taká fáza, ktorá ešte nebola označená a leží najbližšie k zadanej polohe. Ak taká fáza nejestvuje, tak nie je označená žiadna fáza. V kľúčových fázach je spúšťaná metóda
vstupDoKľúčovejFázyDráhy(int fáza)namiesto metódykráčaniePoDráhe().- Parametre:
fáza– približná poloha fázy, ktorá má byť označená za kľúčovúokruh– vonkajší polomer okruhu bodov, ktoré sú brané do úvahy- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
oznacKlucovuFazuDrahy
public void oznacKlucovuFazuDrahy(Poloha poloha, double okruh)
Alias pre označKľúčovúFázuDráhy.
-
zrušKľúčovúFázuDráhy
public void zrušKľúčovúFázuDráhy(Poloha poloha, double okruh)
Zruší označenie takej fázy dráhy za kľúčové, ktorej poloha je najbližšie k zadanej polohe v rámci zadaného okruhu, pričom sú počas hľadania vhodnej fázy na zrušenie brané do úvahy len už označené fázy. To znamená, že z fáz v zadanom okruhu je zrušená tá, ktorá leží najbližšie k zadanej polohe. Ak taká fáza nejestvuje, nie je zrušená žiadna z fáz.
- Parametre:
fáza– približná poloha kľúčovej fázy, ktorá má byť zrušenáokruh– vonkajší polomer okruhu bodov, ktoré sú brané do úvahy- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
zrusKlucovuFazuDrahy
public void zrusKlucovuFazuDrahy(Poloha poloha, double okruh)
Alias pre zrušKľúčovúFázuDráhy.
-
kráčamPoDráhe
public boolean kráčamPoDráhe()
Metóda zistí, či sa robot práve nachádza v režime kráčania po dráhe. (Robot môže byť aj deaktivovaný, ale musí sa nachádzať v režime kráčania po dráhe.)
- Návratová hodnota:
- ak je robot v režime kráčania po dráhe, tak je
návratová hodnota
true - Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
kracamPoDrahe
public boolean kracamPoDrahe()
Alias pre kráčamPoDráhe.
-
fázaDráhy
public int fázaDráhy()
Zistí aktuálnu fázu pohybu robota po dráhe.
- Návratová hodnota:
- aktuálna fáza pohybu po dráhe – index prvku v zozname, ktorý určuje body dráhy
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
fazaDrahy
public int fazaDrahy()
Alias pre fázaDráhy.
-
fázaDráhy
public void fázaDráhy(int nováFáza)
Zmení fázu pohybu robota po dráhe. Ak je hodnota novej fázy záporná, pohyb po dráhe je zastavený. Ak je hodnota kladná, robot sa presunie na bod s indexom novej fázy a pokračuje v pohybe po dráhe.
- Parametre:
nováFáza– nová hodnota fázy pohybu robota po dráhe – nový index prvku v zozname, ktorý určuje body dráhy- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
fazaDrahy
public void fazaDrahy(int nováFáza)
Alias pre fázaDráhy.
-
kráčaniePoDráhe
public void kráčaniePoDráhe()
Táto metóda je predvolene prázdna. Je určená na prekrytie a je spúšťaná v pravidelnom časovom intervale počas pohybu robota po dráhe, okrem prípadov kľúčových fáz dráhy, kedy je namiesto tejto metódy spustená metóda
vstupDoKľúčovejFázyDráhy. V režime pohybu robota po dráhe nahrádza táto metóda spolu s metódouvstupDoKľúčovejFázyDráhyreakciuaktivita().- Pozri tiež:
aktivita(),vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe(),koniecDráhy()
-
kracaniePoDrahe
public void kracaniePoDrahe()
Alias pre kráčaniePoDráhe.
-
vstupDoKľúčovejFázyDráhy
public void vstupDoKľúčovejFázyDráhy(int fáza)
Táto metóda je predvolene prázdna. Je určená na prekrytie a je spúšťaná v kľúčových fázach počas pohybu robota po dráhe, kedy nahrádza volanie metódy
kráčaniePoDráhe. V režime pohybu robota po dráhe nahrádza táto metóda spolu s metódoukráčaniePoDráhereakciuaktivita().- Parametre:
fáza– aktuálne číslo fázy pohybu- Pozri tiež:
aktivita(),vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),státieNaDráhe(),koniecDráhy()
-
vstupDoKlucovejFazyDrahy
public void vstupDoKlucovejFazyDrahy(int fáza)
Alias pre vstupDoKľúčovejFázyDráhy.
-
státieNaDráhe
public void státieNaDráhe()
Táto metóda je predvolene prázdna. Je určená na prekrytie a je spúšťaná v pravidelnom časovom intervale počas deaktivácie robota v režime pohybu po dráhe. V režime pohybu robota po dráhe nahrádza táto metóda reakciu
pasivita().- Pozri tiež:
pasivita(),vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),koniecDráhy()
-
statieNaDrahe
public void statieNaDrahe()
Alias pre státieNaDráhe.
-
koniecDráhy
public void koniecDráhy()
Táto metóda je predvolene prázdna. Je určená na prekrytie a je spustená po dokončení pohybu robota po dráhe.
- Pozri tiež:
vytvorDráhu(),vytvorDráhu(double),vytvorDráhu(Shape),vytvorDráhu(Shape, double),dráha(),dráha(Vector),obráťDráhu(),posuňDráhu(double, double),posuňDráhu(int),vytvorMapuSmerov(),vytvorMapuSmerov(double),vytvorMapuSmerov(Shape),vytvorMapuSmerov(Shape, double),mapaSmerov(),mapaSmerov(Vector),obráťMapuSmerov(),pootočMapuSmerov(double),posuňMapuSmerov(int),kráčajPoDráhe(),zastavNaDráhe(),pokračujVDráhe(),označKľúčovúFázuDráhy(int),zrušKľúčovúFázuDráhy(int),označKľúčovúFázuDráhy(Poloha),zrušKľúčovúFázuDráhy(Poloha),označKľúčovúFázuDráhy(Poloha, double),zrušKľúčovúFázuDráhy(Poloha, double),kráčamPoDráhe(),fázaDráhy(),fázaDráhy(int),kráčaniePoDráhe(),vstupDoKľúčovejFázyDráhy(int),státieNaDráhe()
-
koniecDrahy
public void koniecDrahy()
Alias pre koniecDráhy.
-
pracuj
public void pracuj()
Táto metóda je automaticky spúšťaná
časovačom. Tvorí model správania aktívne roboty a zároveň pravidelne spúšťa metóduaktivitapre aktívne roboty apasivitapre pasívne roboty. Aktívny robot môže mať definovaný cieľ alebo trvanie aktivity (pozriaktivuj(trvanieAktivity). Na to, aby sa robot mohol pohybovať (a dostať sa do cieľa), musí mať definovanú hodnotu rýchlosti, prípadne zrýchlenia. Ďalšie atribúty ako maximálna rýchlosť, rýchlosť otáčania, zrýchlenie otáčania a maximálna rýchlosť otáčania sú nepovinné. Iba menia správanie robota pri pohybe, ktorý sa tým môže stať o niečo prirodzenejším.Poznámka: Prekrytím tejto metódy by sme mohli úplne prepracovať správanie robota – aktívneho aj neaktívneho, avšak odporúčame ponechať predvolené správanie a iba korigovať správanie robotov prepisovaním metód
aktivitaapasivita.
-
vyzviRoboty
public void vyzviRoboty()
Spustením tejto metódy sa pre každý robot (podľa ich aktuálneho poradia) vykoná reakcia
prijatieVýzvy, pričom autorom výzvy bude tento robot a hodnota argumentukľúčbude rovná-1. Prvotné poradie robotov je určené poradím ich vytvorenia (čiže ak sme nijako neovplyvnili poradie robotov, je prvý vyzvaný ten robot, ktorý bol vytvorený ako prvý, to jest robot, ktorý je nakreslený pod všetkými ostatnými robotmi). Dodatočne môžeme poradie ovplyvniť volaním metódnaVrch,naSpodok,vyššie,nižšie,predaza.Poznámka: Ak je poradie robotov zmenené počas spracovania výzviev, tak bude posielanie výziev z technických príčin opätovne spustené (inak povedané – posielanie výziev sa „reštartuje“). To znamená, že niektoré roboty budú vyzvané dva alebo viac ráz. Buďte preto opatrní so zmenami poradia v rámci spracovania výziev, aby ste nespôsobili vznik nekonečného cyklu… (Rovnaký efekt má prípadné vytvorenie nového robota, resp. ľubovoľnej inštancie triedy odvodenej od robota.)
Poznámka: Mechanizmus výziev nie je taký efektívny ako definícia vlastného zoznamu robotov (prípadne inštancií odvodených tried) a vykonanie hromadnej akcie pomocou tohto zoznamu. Slúži predovšedkým na umožnenie hromadného spracovania bez nevyhnutnosti vytvárania takého zoznamu (napríklad pri malom počte robotov alebo predtým, než sa programátor podrobnejšie oboznámi s možnosťami zoznamov).
Príklad použitia mechanizmu výziev je napríklad v opise metódy
mimoHraníc.
-
vyzviRobotov
public void vyzviRobotov()
Alias pre vyzviRoboty.
-
vyzviRoboty
public void vyzviRoboty(int kľúč)
Spustením tejto metódy sa pre každý robot (podľa ich aktuálneho poradia) vykoná reakcia
prijatieVýzvy, pričom autorom výzvy bude tento robot. S pomocou argumentukľúčmôžeme odlišovať rôzne druhy výziev a ovplyvňovať tým správanie reakcieprijatieVýzvy. Prvotné poradie robotov je určené poradím ich vytvorenia (čiže ak sme nijako neovplyvnili poradie robotov, je prvý vyzvaný ten robot, ktorý bol vytvorený ako prvý, to jest robot, ktorý je nakreslený pod všetkými ostatnými robotmi). Dodatočne môžeme poradie ovplyvniť volaním metódnaVrch,naSpodok,vyššie,nižšie,predaza.Poznámka: Ak je poradie robotov zmenené počas spracovania výzviev, tak bude posielanie výziev z technických príčin opätovne spustené (inak povedané – posielanie výziev sa „reštartuje“). To znamená, že niektoré roboty budú vyzvané dva alebo viac ráz. Buďte preto opatrní so zmenami poradia v rámci spracovania výziev, aby ste nespôsobili vznik nekonečného cyklu… (Rovnaký efekt má prípadné vytvorenie nového robota, resp. ľubovoľnej inštancie triedy odvodenej od robota.)
Poznámka: Mechanizmus výziev nie je taký efektívny ako definícia vlastného zoznamu robotov (prípadne inštancií odvodených tried) a vykonanie hromadnej akcie pomocou tohto zoznamu. Slúži predovšedkým na umožnenie hromadného spracovania bez nevyhnutnosti vytvárania takého zoznamu (napríklad pri malom počte robotov alebo predtým, než sa programátor podrobnejšie oboznámi s možnosťami zoznamov).
Príklad použitia mechanizmu výziev je napríklad v opise metódy
mimoHraníc.- Parametre:
kľúč– celočíselná hodnota, ktorá je poslaná do reakcieprijatieVýzvykaždého robota; takto je možné odlíšiť rôzne druhy výziev, vďaka čomu môžeme ovplyvniť správanie reakcieprijatieVýzvy- Pozri tiež:
prijatieVýzvy(GRobot, int),vyzviRoboty(),vyzviRoboty(int, boolean),Svet.vyzviRoboty(int)
-
vyzviRobotov
public void vyzviRobotov(int kľúč)
Alias pre vyzviRoboty.
-
vyzviRoboty
public void vyzviRoboty(int kľúč, boolean obrátene)Spustením tejto metódy sa pre každý robot (podľa ich aktuálneho poradia) vykoná reakcia
prijatieVýzvy, pričom autorom výzvy bude tento robot. S pomocou argumentukľúčmôžeme odlišovať rôzne druhy výziev a ovplyvňovať tým správanie reakcieprijatieVýzvy. Argumentobráteneurčuje smer spracovania. Ak je rovnýtrue, zoznam robotov bude spracovaný od konca, to znamená, že prvý bude vyzvaný buď naposledy vytvorený robot, alebo robot aktuálne umiestnený na konci vnútorného zoznamu robotov. Záleží od toho, či sme dodatočne ovplyvňovali poradie robotov metódaminaVrch,naSpodok,vyššie,nižšie,predaza. Ak je hodnota argumentuobrátenerovnáfalse, metóda sa správa rovnako akovyzviRoboty(int kľúč).Poznámka: Ak je poradie robotov zmenené počas spracovania výzviev, tak bude posielanie výziev z technických príčin opätovne spustené (inak povedané – posielanie výziev sa „reštartuje“). To znamená, že niektoré roboty budú vyzvané dva alebo viac ráz. Buďte preto opatrní so zmenami poradia v rámci spracovania výziev, aby ste nespôsobili vznik nekonečného cyklu… (Rovnaký efekt má prípadné vytvorenie nového robota, resp. ľubovoľnej inštancie triedy odvodenej od robota.)
Poznámka: Mechanizmus výziev nie je taký efektívny ako definícia vlastného zoznamu robotov (prípadne inštancií odvodených tried) a vykonanie hromadnej akcie pomocou tohto zoznamu. Slúži predovšedkým na umožnenie hromadného spracovania bez nevyhnutnosti vytvárania takého zoznamu (napríklad pri malom počte robotov alebo predtým, než sa programátor podrobnejšie oboznámi s možnosťami zoznamov).
Príklad použitia mechanizmu výziev je napríklad v opise metódy
mimoHraníc.- Parametre:
kľúč– celočíselná hodnota, ktorá je poslaná do reakcieprijatieVýzvykaždého robota; takto je možné odlíšiť rôzne druhy výziev, vďaka čomu môžeme ovplyvniť správanie reakcieprijatieVýzvyobrátene– týmto argumentom môžeme ovplyvniť smer spracovania;trueznamená spracovanie vnútorného zoznamu robotov od konca;falseznamená rovnaký spôsob spracovania ako pri metódevyzviRoboty(int kľúč)- Pozri tiež:
prijatieVýzvy(GRobot, int),vyzviRoboty(),vyzviRoboty(int),Svet.vyzviRoboty(int, boolean)
-
vyzviRobotov
public void vyzviRobotov(int kľúč, boolean obrátene) Alias pre vyzviRoboty.
-
aktivita
public void aktivita()
Táto metóda je predvolene prázdna. Je automaticky spúšťaná metódou
pracujpri aktívnom robote. Jej prekrytím môžete upraviť správanie aktívneho robota. V režime pohybu robota po dráhe je táto metóda nahradená reakciamikráčaniePoDráhe()avstupDoKľúčovejFázyDráhy(int fáza).Príklad:
Robot v tomto príklade kreslí šedý chuchvalec. V konštruktore je robot aktivovaný a nastavuje svoju farbu na šedú. Po aktivácii je až do ukončenia aplikácie neustále automaticky spúšťaná metóda
aktivita, v ktorej robot náhodne mení smer a posúva sa o jeden a pol boda dopredu. Výsledný efekt je nekonečné kreslenie chuchvalca šedého vlákna…importknižnica.*;publicclassHlavnáTriedaextendsGRobot{privateHlavnáTrieda() {farba(šedá);aktivuj(); }@Overridepublicvoidaktivita() {náhodnýSmer();dopredu(1.5); }publicstaticvoidmain(String[] args) {newHlavnáTrieda(); } }Výsledok:
Ukážka možného výstupu náhodného kreslenia na zmenšenom plátne
(robot i tak väčšinou veľmi rýchlo opustí plochu plátna).- Pozri tiež:
pasivita(),aktivácia(),deaktivácia(),spustenie(),zastavenie(),dosiahnutieCieľa(),kráčaniePoDráhe()
-
pasivita
public void pasivita()
Táto metóda je predvolene prázdna. Je automaticky spúšťaná metódou
pracujpri pasívnom robote. Jej prekrytím môžete upraviť správanie pasívneho robota. V režime pohybu robota po dráhe je táto metóda nahradená reakcioustátieNaDráhe().Príklad:
Príklad ukazuje implementáciu blikania robota v dvoch odtieňoch oranžovej farby.
V tomto príklade musíme ručne spustiť časovač (pretože ten nie je spúšťaný automaticky a keďže ideme pracovať s pasívnym robotom, nepoužívame žiadny príkaz, ktorý spúšťa časovač automaticky). V dôsledku toho je v pravidelnom časovom intervale spúšťaná metóda
pasivita, v ktorej je umiestnené jednoduché vetvenie spôsobujúce blikanie robota v dvoch odtieňoch oranžovej farby, čo má symbolizovať pohotovostný režim. Konštruktor má za úlohu iba inicializovať farbu robota na jeden z odtieňov oranžovej.importknižnica.*;publicclassHlavnáTriedaextendsGRobot{privateHlavnáTrieda() {farba(oranžová);// Nastavíme predvolený vyplnený tvar robota a zväčšíme// jeho veľkosť, aby bol efekt lepšie viditeľný:predvolenýVyplnenýTvar();veľkosť(30); }@Overridepublicvoidpasivita() {if(oranžová==farba())farba(tmavooranžová);elsefarba(oranžová); }publicstaticvoidmain(String[] args) {newHlavnáTrieda();Svet.spustiČasovač(0.5); } }Výsledok:
Výrez plochy s blikajúcim oranžovým robotom.- Pozri tiež:
aktivita(),aktivácia(),deaktivácia(),spustenie(),zastavenie(),dosiahnutieCieľa(),státieNaDráhe()
-
aktivácia
public void aktivácia()
Táto metóda je predvolene prázdna. Je automaticky spustená pri volaní metódy
aktivuj(alebo jej „klonu“). Jej prekrytím môžete upraviť správanie robota pri aktivácii.Príklad:
Tento príklad je podobný ako ten pri metóde
spustenie. Oba sa vzájomne odlišujú v spôsobe aktivácie robota fungujúceho v úlohe strely a aj v dĺžke aktivity. Tento príklad otočí robot pri kliknutí myšou na pozíciu ukazovateľa myši a aktivuje ho na10tikov. Ide o klasickú aktiváciu (v zmysle vysvetlenia v opise metódyaktívny), preto sú prekryté metódyaktiváciaadeaktivácia. Tie zariadia, že robot (strela) sa po aktivácii zobrazí a pri deaktivácii, naopak, skryje.importknižnica.*;publicclassHlavnáTriedaextendsGRobot{privateHlavnáTrieda() {zdvihniPero();rýchlosť(10,false);skry(); }@Overridepublicvoidaktivácia() {zobraz(); }@Overridepublicvoiddeaktivácia() {skry(); }publicstaticvoidmain(String[] args) {finalGRobotstrela =newHlavnáTrieda();newObsluhaUdalostí() {@Overridepublicvoidklik() { strela.otočNaMyš(); strela.aktivuj(10); } }; } }- Pozri tiež:
aktivita(),pasivita(),deaktivácia(),spustenie(),zastavenie(),dosiahnutieCieľa()
-
aktivacia
public void aktivacia()
Alias pre aktivácia.
-
deaktivácia
public void deaktivácia()
Táto metóda je predvolene prázdna. Je automaticky spustená pri volaní metódy
deaktivuj. Jej prekrytím môžete upraviť správanie robota pri deaktivácii.Príklad použitia tejto metódy je pri opise metódy
aktivácia.- Pozri tiež:
aktivita(),pasivita(),aktivácia(),spustenie(),zastavenie(),dosiahnutieCieľa()
-
deaktivacia
public void deaktivacia()
Alias pre deaktivácia.
-
spustenie
public void spustenie()
Táto metóda je predvolene prázdna. Je automaticky spustená pri volaní metódy
spusti(alebo jej „klonu“). Jej prekrytím môžete upraviť správanie robota pri „spustení“ (čo je chápané ako druh akcie s individuálnym robotom, nie v zmysle spustenia aplikácie, ani nič podobné).Príklad:
Tento príklad je podobný ako ten pri metóde
aktivácia. Oba sa vzájomne odlišujú v spôsobe aktivácie robota fungujúceho v úlohe strely a aj v dĺžke aktivity. Tento príklad funguje na princípe sledovania cieľa. Pri kliknutí myšou je zahájené smerovanie robota (strely) do cieľa, pričom cieľom je pozícia myši v čase kliknutia. Ide o alternatívnu aktiváciu (v zmysle vysvetlenia v opise metódyaktívny), preto sú prekryté metódyspustenieazastavenie. Tie zariadia, že robot (strela) sa po zahájení smerovania na cieľ zobrazí a po dosiahnutí cieľa, naopak, skryje.importknižnica.*;publicclassHlavnáTriedaextendsGRobot{privateHlavnáTrieda() {zdvihniPero();rýchlosť(10,false);skry(); }@Overridepublicvoidspustenie() {zobraz(); }@Overridepublicvoidzastavenie() {skry(); }publicstaticvoidmain(String[] args) {finalGRobotstrela =newHlavnáTrieda();newObsluhaUdalostí() {@Overridepublicvoidklik() { strela.cieľNaMyš(true); } }; } }- Pozri tiež:
aktivita(),pasivita(),aktivácia(),deaktivácia(),zastavenie(),dosiahnutieCieľa()
-
zastavenie
public void zastavenie()
Táto metóda je predvolene prázdna. Je automaticky spustená pri volaní metódy
zastav. Jej prekrytím môžete upraviť správanie robota pri „zastavení“ (čo je chápané ako opak „spustenia“).Príklad použitia tejto metódy je pri opise metódy
spustenie.- Pozri tiež:
aktivita(),pasivita(),aktivácia(),deaktivácia(),spustenie(),dosiahnutieCieľa()
-
zastaveniePosunu
public void zastaveniePosunu()
Táto metóda je predvolene prázdna. Je automaticky spustená pri volaní metódy
zastavPosunpo splnení podmienok, ktoré sú pri nej určené. Prekrytím tejto metódy môžete upraviť správanie robota pri zastavení posunu (čo je druh pohybu kolmý na aktuálny smer robota).
-
dosiahnutieCieľa
public void dosiahnutieCieľa()
Táto metóda je predvolene prázdna. Je automaticky spustená metódou
pracujpo dosiahnutí cieľa. Jej prekrytím môžete upraviť správanie robota pri dosiahnutí cieľa.Príklad:
V tomto jednoduchom príklade robot pri každom kliknutí zamieri na pozíciu myši v čase kliknutia a po dosiahnutí stanoveného cieľa náhodne zmení veľkosť v rozmedzí
5až25.importknižnica.*;publicclassHlavnáTriedaextendsGRobot{privateHlavnáTrieda() {zdvihniPero();rýchlosť(10,false);newObsluhaUdalostí() {@Overridepublicvoidklik() {cieľNaMyš(true); } }; }@OverridepublicvoiddosiahnutieCieľa() {veľkosť(Svet.náhodnéCeléČíslo(5,25)); }publicstaticvoidmain(String[] args) {newHlavnáTrieda(); } }- Pozri tiež:
aktivita(),pasivita(),aktivácia(),deaktivácia(),spustenie(),zastavenie()
-
dosiahnutieCiela
public void dosiahnutieCiela()
Alias pre dosiahnutieCieľa.
-
zobrazenie
public void zobrazenie()
Táto metóda je predvolene prázdna. Je automaticky spustená pri zobrazení robota, napríklad počas konštrukcie robota, po volaní metódy
zobraz(alebo jej „klonu“), prípadne po zmene viditeľnosti (to jest zobrazení) robota počas prechodu na domovskú pozíciu. Jej prekrytím sa dá upraviť správanie robota počas jeho zobrazenia.Príklad:
V tomto príklade sú reakcie
zobrazenieaskrytievyužité na synchronizované zobrazovanie a skrývanie dvoch robotov, z ktorých jeden predstavuje podvozok a druhý delo tanku (z ktorých oboje môže mať samostatný smer). Smerovanie dela sa riadi jednoducho pohybom myši nad plátnom a na ovládanie podvozku tanku slúžia klávesyA,S,W,D. Na synchronizované zobrazovanie a skrývanie dvojice robotov slúžia medzerník a ľubovoľné tlačidlo myši.importknižnica.*;publicclassZobrazenieRobotaextendsGRobot{privatestaticGRobotdelo;privateZobrazenieRobota() {ohranič();zaoblenie(5);pomer(0.8);zdvihniPero();hrúbkaČiary(2.5);Svet.zbaľ();Svet.prekresli(); }@OverridepublicvoidkresliSeba() {obdĺžnik(); }@Overridepublicvoidzobrazenie() { delo.zobraz(); }@Overridepublicvoidskrytie() { delo.skry(); }@OverridepublicvoidstlačenieKlávesu() {switch(ÚdajeUdalostí.kláves()) {caseKláves.VK_W:rýchlosť(10);break;caseKláves.VK_S:rýchlosť(-10);break;caseKláves.VK_A:rýchlosťOtáčania(10);break;caseKláves.VK_D:rýchlosťOtáčania(-10);break;caseKláves.MEDZERA:skry();break; } }@OverridepublicvoiduvoľnenieKlávesu() {switch(ÚdajeUdalostí.kláves()) {caseKláves.VK_W:caseKláves.VK_S:rýchlosť(0);break;caseKláves.VK_A:caseKláves.VK_D:rýchlosťOtáčania(0);break;caseKláves.MEDZERA:zobraz();break; } }@Overridepublicvoidaktivita() { delo.skočNa(this); }@OverridepublicvoidpohybMyši() { delo.otočNaMyš(); }@OverridepublicvoidstlačenieTlačidlaMyši() {skry(); }@OverridepublicvoiduvoľnenieTlačidlaMyši() {zobraz(); }publicstaticvoidmain(String[] args) {Svet.použiKonfiguráciu("ZobrazenieRobota.cfg"); delo =newGRobot(500,400); delo.vlastnýTvar(r -> r.vpred()); delo.hrúbkaČiary(5); delo.veľkosť(15);newZobrazenieRobota(); } }
Ukážka fungovania príkladu synchronizovaného zobrazenia a skrytia robotov (podvozku a dela tanku).- Pozri tiež:
skrytie()
-
skrytie
public void skrytie()
Táto metóda je predvolene prázdna. Je automaticky spustená pri skrytí robota, napríklad po volaní metódy
skryalebo po zmene viditeľnosti (to jest skrytí) robota počas prechodu na domovskú pozíciu. Jej prekrytím sa dá upraviť správanie robota počas jeho skrytia.Príklad použitia tejto metódy je v opise metódy
zobrazenie.- Pozri tiež:
zobrazenie()
-
prijatieVýzvy
public void prijatieVýzvy(GRobot autor, int kľúč)
Táto metóda je predvolene prázdna. Je automaticky spustená pri vykonaní metódy
Svet.vyzviRoboty(kľúč)aleboGRobot.vyzviRoboty(kľúč). Rozhodovanie o účele aktuálnej výzvy v tele tejto reakcie je možné určiť pomocou hodnoty kľúča, ktorého hodnotu zadávame pri volaní metódSvet.vyzviRoboty(kľúč),GRobot.vyzviRoboty(kľúč).Tip: Parameter
kľúčposkytuje potrebný základ k mechanizmu spracovania výziev. Širšie možnosti poskytuje parameterautor. Stačí si uvedomiť, že to nemusí byť nevyhnutne objekt typuGRobot, ale aj ľubovoľný objekt odvodeného údajového typu, ktorý môže obsahovať množstvo doplnkových údajov. Autora môžeme vždy spracovať pomocou mechanizmu pretypovania. Pozri nasledujúci kód.if(autorinstanceofOdvodenýTyp) { OdvodenýTyp odvodenáInštancia = (OdvodenýTyp)autor;// práca s údajmi odvodenej inštancie…}- Parametre:
autor– obsahuje buď objekt, ktorý výzvu poslal (autora výzvy), alebonullak išlo o výzvu zo strany sveta (Svet.vyzviRoboty(kľúč))kľúč– hodnota prijímaná z metódSvet.vyzviRoboty(kľúč),GRobot.vyzviRoboty(kľúč)- Pozri tiež:
vyzviRoboty(),vyzviRoboty(int),vyzviRoboty(int, boolean),Svet.vyzviRoboty(),Svet.vyzviRoboty(int),Svet.vyzviRoboty(int, boolean)
-
prijatieVyzvy
public void prijatieVyzvy(GRobot autor, int kľúč)
Alias pre prijatieVýzvy.
-
mimoHraníc
public boolean mimoHraníc(Bod[] poleBodov, double uhol)
Táto metóda je predvolene prázdna. Je určená na prekrytie v niektorej z tried odvodených od robota. Je automaticky spúšťaná počas kontroly polohy robota v dôsledku aktivácie funkcie ohraničenia polohy robota pri jeho pohybe.
Metóda prijme štvorprvkové pole bodov, ktoré opisuje situáciu v čase kolízie robota s niektorou z hraníc ohraničenia. Prvý bod poľa obsahuje súradnice robota pred začatím pohybu, druhý cieľové súradnice, na ktoré bude robot presunutý, ak táto metóda dovolí ďalšie spracovanie ohraničenia (návratovou hodnotou) a ďalšie dva body vymedzujú úsečku tej hranice ohraničenia, na ktorú robot narazil. Aktuálna poloha robota je presne tá, ktorá je mimo hraníc.
Posledný parameter určuje orientáciu robota pred začatím pohybu (ak sa robot nepohyboval po oblúku, mala by byť zhodná s aktuálnou orientáciou robota).
Návratová hodnota tejto reakcie určí, či má spracovanie pokračovať vnútorným mechanizmom triedy
GRobot. Ak autor prekrytia určí, že nie (návratovou hodnotoufalse), tak cieľové hodnoty nebudú nastavené.Poznámka: Pole bodov je opisné a jeho akákoľvek zmena neovplyvní situáciu za hranicami tejto metódy. To znamená, že úpravy polôh bodov alebo zámena prvkov poľa nezmenia skutočné hodnoty polôh, ktoré odzrkadľujú.
Keď zapneme spôsob spracovania ohraničenia
ODRAZa chceme, aby sa pri odraze korektne menil smer robota, môžeme na prepočet použiť nasledujúci kód umiestnený v rámci reakciemimoHraníc:@OverridepublicbooleanmimoHraníc(Bod[] poleBodov,doubleuhol) {Bodpriesečník =Svet.priesečníkÚsečiek(poleBodov[0],poloha(), poleBodov[2], poleBodov[3]);if(null!= priesečník)smer(Svet.smer(priesečník, poleBodov[1]));returntrue; }
Grafické znázornenie situácie.Príklad:
Tento príklad je implementáciou jednoduchej zábavky. Oplotené roboty sú naprogramovaní tak, aby sa každý z nich pohyboval vo svojom vymedzenom priestore. Roboty reagujú na kliknutie myšou, ale vždy len jeden z nich – ten, ktorý je takzvane dotknutý. Ak aktuálne dotknutý robot narazí na hranice svojho ohraničenia, posunie stav dotknutia nasledujúcemu robotu v poradí.
importknižnica.*;publicclassOplotenéRobotyextendsGRobot{// Statická premenná slúžiaca na detekciu kolízií priestorov ohraničenia// robotov.privatestaticbooleankolíziaPolôh =false;// Statická premenná počítajúca vytvorené inštancie ohraničených robotov.privatestaticintpočetRobotov =0;// Statická premenná slúžiaca ako ukazovadlo práve dotknutého robota.privatestaticintukazovadloRobota =0;// Inštančná premenná slúžiaca ako príznak dotknutia tohto robota.privatebooleandotknutý =false;// Inštančná premenná slúžiaca na uchovanie indexu (poradia vytvorenia)// tohto robota.privateintindexRobota;// Konštruktor – vykoná základné nastavenia tejto inštancie robota.privateOplotenéRoboty() { indexRobota = početRobotov++; nájdiPolohu();ohranič(100,50,ODRAZ);obdĺžnik(100,50);maximálnaRýchlosť(50);zrýchlenie(1.25,false);zdvihniPero(); }// Vyhľadá polohu, ktorá nekoliduje so žiadnym vytvoreným robotom.privatevoidnájdiPolohu() {farba(šedá);do{ kolíziaPolôh =false;// Zvolenie náhodnej polohy robota:domov(Svet.náhodnéReálneČíslo(Svet.najmenšieX() +110,Svet.najväčšieX() -110),Svet.náhodnéReálneČíslo(Svet.najmenšieY() +60,Svet.najväčšieY() -60));// Nakreslenie šedého obdĺžnika:obdĺžnik(100,50);// Overenie kolízií:vyzviRoboty(-2); }while(kolíziaPolôh);farba(modrá); }// Viacúčelová reakcia na hromadnú výzvu vytvorených robotov.@OverridepublicvoidprijatieVýzvy(GRobotautor,intkľúč) {// Kladné kľúče slúžia na dotknutie požadovaného robota.if(0<= kľúč) { dotknutý = indexRobota == kľúč % početRobotov;if(dotknutý)farba(tyrkysová);elsefarba(oranžová); }// Kľúč −2 je rezervovaný na hľadanie kolízií priestorov ohraničenia// robotov.elseif(-2== kľúč) {if(this!= autor) {if(bodVObdĺžniku(autor,210,110)) {farba(červená);krúžok(); kolíziaPolôh =true; }else{farba(zelená);krúžok(); } } }// Kľúč −3 je rezervovaný na vyplnenie priestoru ohraničenia tohto robota.elseif(-3== kľúč) {domov();farba(biela);vyplňObdĺžnik(100,50); }// Kľúč −2 je rezervovaný na nakreslenie orámovania priestoru ohraničenia// tohto robota.elseif(-4== kľúč) {domov();farba(čierna);kresliObdĺžnik(100,50); } }// Na kliknutie zareaguje len dotknutý robot a to stanovením nového cieľa// pohybu podľa polohy myši v čase kliknutia.@Overridepublicvoidklik() {if(dotknutý)cieľNaMyš(); }// Reakcia na narazenie na hranice ohraničenia robota. Tento robot dokončí// svoj pohyb a pomocou mechanizmu výzvy bude dotknutý ďalší robot v poradí.@OverridepublicbooleanmimoHraníc(Bod[] poleBodov,doubleuhol) {Bodpoloha =poloha();Bodcieľ = poleBodov[1];Svet.vyzviRoboty(++ukazovadloRobota); poleBodov[1] = poloha;Bodpriesečník =Svet.priesečníkPriamok(poleBodov);if(null!= priesečník) {skočNa(priesečník);otočNa(cieľ);zrušCieľ(false);zabrzdi();returnfalse; }returntrue; }// Hlavná metóda – vstupný bod aplikácie.publicstaticvoidmain(String... args) {Svet.použiKonfiguráciu("OplotenéRoboty.cfg");// Vytvorenie niekoľkých ohraničených robotov. Každý robot si nájde// unikátnu polohu, ktorá nekoliduje s ostatnými robotmi. (Ak by bolo// robotov príliš veľa, aplikácia sa z tohto cyklu nikdy nevymaní.)for(inti =0; i <7; ++i)newOplotenéRoboty();// Zbalenie a vystredenie sveta pri prvom spustení aplikácie.if(Svet.prvéSpustenie()) {Svet.zbaľ();Svet.vystreď(); }// Vymazanie priebehu hľadania unikátnych polôh robotov, nakreslenie// priestoru ohraničenia pre každý robot a dotknutie prvého robota// v poradí.podlaha.vymažGrafiku();Svet.farbaPozadia(šedá);Svet.vyzviRoboty(-3);Svet.vyzviRoboty(-4);Svet.vyzviRoboty(ukazovadloRobota); } }Výsledok:
Výrez plochy zábavky s názvom „oplotené roboty.“- Parametre:
poleBodov– pole bodov obsahujúce súradnice bodov, ktoré súvisia s kolíziou s niektorou z hraníc ohraničenia – podrobnosti sú v opise vyššieuhol– uhol (smer) robota pred začatím pohybu- Návratová hodnota:
trueznamená, že spracovanie má pokračovať vnútorným mechanizmom triedyGRobot
-
mimoHranic
public boolean mimoHranic(Bod[] poleBodov, double uhol)
Alias pre mimoHraníc.
-
mimoHraníc
public void mimoHraníc()
Táto metóda je predvolene prázdna. Je určená na prekrytie v niektorej z tried odvodených od robota. Je automaticky spúšťaná po kontrole polohy robota v dôsledku aktivácie funkcie ohraničenia polohy robota pri jeho pohybe.
Táto metóda slúži na stručné upozornenie na nedávne prekročenie hraníc robotom. Neposkytuje žiadne doplňujúce informácie o tom, ako táto udalosť vznikla. Metóda je zjednodušenou alternatívou metódy
mimoHraníc(poleBodov, uhol), ktorá prijíma podrobnosti vo svojich parametroch a po ktorej je volaná, ak to uvedená metóda dovolí.To znamená, že táto metóda je spustená len v prípade, ak jej podrobnejšia verzia vrátila hodnotu
true, čím povolila ďalšie spracovanie. To tiež znamená, že v čase spustenia tejto metódy je robot na cieľovom mieste určenom pravidlami ohraničenia.
-
mimoHranic
public void mimoHranic()
Alias pre mimoHraníc.
-
zmenaPolohy
public boolean zmenaPolohy()
Táto metóda je predvolene prázdna. Je určená na prekrytie v niektorej z tried odvodených od robota. Je spúšťaná automaticky vždy pri zmene polohy robota (skákanie, rôzne pohyby, všetko, čo vedie ku zmene aktuálnej polohy…), okrem zmien vykonávaných v rámci procesu kreslenia vlastného tvaru. Návratová hodnota tejto metódy určuje, či smie byť zmena schválená. Ak nebude schválená, robot sa nepohne, resp. technicky sa vráti na svoju poslednú polohu.
Príklad:
@OverridepublicbooleanzmenaPolohy() {Svet.vypíšRiadok("Zmena polohy: ",poslednáPoloha()," – "+poloha());Svet.vypíšRiadok("Zistené volanie: ",GRobotException.stackTraceToString(newThrowable()));returntrue; }- Návratová hodnota:
- určuje, či smie byť zmena schválená
-
zmenaUhla
public boolean zmenaUhla()
Táto metóda je predvolene prázdna. Je určená na prekrytie v niektorej z tried odvodených od robota. Je spúšťaná automaticky vždy pri zmene uhla robota (nastavovanie, otáčanie, všetko, čo vedie ku zmene orientácie…), okrem zmien vykonávaných v rámci procesu kreslenia vlastného tvaru. Návratová hodnota tejto metódy určuje, či smie byť zmena schválená. Ak nebude schválená, robot sa nepohne (neotočí), resp. technicky sa vráti naspäť na svoj posledný smer.
Príklad:
@OverridepublicbooleanzmenaUhla() {Svet.vypíšRiadok("Zmena uhla: ",poslednýUhol()," – "+uhol());Svet.vypíšRiadok("Zistené volanie: ",GRobotException.stackTraceToString(newThrowable()));returntrue; }- Návratová hodnota:
- určuje, či smie byť zmena schválená
-
tik
public void tik()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.tik(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
klik
public void klik()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.klik(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
voľbaPoložkyPonuky
public void voľbaPoložkyPonuky()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.voľbaPoložkyPonuky(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
volbaPolozkyPonuky
public void volbaPolozkyPonuky()
Alias pre voľbaPoložkyPonuky.
-
voľbaKontextovejPoložky
public void voľbaKontextovejPoložky()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.voľbaKontextovejPoložky(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
volbaKontextovejPolozky
public void volbaKontextovejPolozky()
Alias pre voľbaKontextovejPoložky.
-
voľbaTlačidla
public void voľbaTlačidla()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.voľbaTlačidla(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
volbaTlacidla
public void volbaTlacidla()
Alias pre voľbaTlačidla.
-
zmenaPosunuLišty
public void zmenaPosunuLišty()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.zmenaPosunuLišty().
-
zmenaPosunuListy
public void zmenaPosunuListy()
Alias pre zmenaPosunuLišty.
-
voľbaSystémovejIkony
public void voľbaSystémovejIkony()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.voľbaSystémovejIkony().
-
volbaSystemovejIkony
public void volbaSystemovejIkony()
Alias pre voľbaSystémovejIkony.
-
voľbaSystémovejPoložky
public void voľbaSystémovejPoložky()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.voľbaSystémovejPoložky().
-
volbaSystemovejPolozky
public void volbaSystemovejPolozky()
Alias pre voľbaSystémovejPoložky.
-
vymazanie
public void vymazanie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.vymazanie(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
prekreslenie
public void prekreslenie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.prekreslenie(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
dokreslenie
public void dokreslenie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.dokreslenie(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
zobrazenieOkna
public void zobrazenieOkna()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.zobrazenieOkna().
-
skrytieOkna
public void skrytieOkna()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.skrytieOkna().
-
presunutieOkna
public void presunutieOkna()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.presunutieOkna(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
zmenaVeľkostiOkna
public void zmenaVeľkostiOkna()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.zmenaVeľkostiOkna(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
zmenaVelkostiOkna
public void zmenaVelkostiOkna()
Alias pre zmenaVeľkostiOkna.
-
aktiváciaOkna
public void aktiváciaOkna()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.aktiváciaOkna(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
aktivaciaOkna
public void aktivaciaOkna()
Alias pre aktiváciaOkna.
-
deaktiváciaOkna
public void deaktiváciaOkna()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.deaktiváciaOkna(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
deaktivaciaOkna
public void deaktivaciaOkna()
Alias pre deaktiváciaOkna.
-
maximalizovanie
public void maximalizovanie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.maximalizovanie().
-
minimalizovanie
public void minimalizovanie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.minimalizovanie().
-
obnovenie
public void obnovenie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.obnovenie().
-
otvorenie
public void otvorenie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.otvorenie().
-
zavretie
public boolean zavretie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.zavretie().
-
zatvorenie
public boolean zatvorenie()
Alias pre zavretie.
-
ukončenie
public void ukončenie()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.ukončenie(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).Priorita spúšťania tejto obsluhy udalosti v prekrytých metódach robota a v obsluhe udalostí je upravená tak, aby bola udalosť v obsluhe udalostí spustená pred automatickým uložením konfigurácie a udalosti v robotoch po ňom.
-
ukoncenie
public void ukoncenie()
Alias pre ukončenie.
-
potvrdenieÚdajov
public void potvrdenieÚdajov()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.potvrdenieÚdajov(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
potvrdenieUdajov
public void potvrdenieUdajov()
Alias pre potvrdenieÚdajov.
-
potvrdenieVstupu
public void potvrdenieVstupu()
Alias pre potvrdenieÚdajov.
-
spracovaniePríkazu
public void spracovaniePríkazu()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.spracovaniePríkazu(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
spracovaniePrikazu
public void spracovaniePrikazu()
Alias pre spracovaniePríkazu.
-
zrušenieÚdajov
public void zrušenieÚdajov()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.zrušenieÚdajov(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
zrusenieUdajov
public void zrusenieUdajov()
Alias pre zrušenieÚdajov.
-
zrušenieVstupu
public void zrušenieVstupu()
Alias pre zrušenieÚdajov.
-
zrusenieVstupu
public void zrusenieVstupu()
Alias pre zrušenieÚdajov.
-
spracujRiadokVstupu
public void spracujRiadokVstupu(String riadokVstupu)
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania rovnomennej metódy
ObsluhaUdalostí.spracujRiadokVstupu(riadokVstupu).- Parametre:
riadokVstupu– riadok údajov prijatých zo štandardného vstupu – pozri aj metóduSvet.aktivujŠtandardnýVstup()
-
koniecVstupu
public void koniecVstupu()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania rovnomennej metódy
ObsluhaUdalostí.koniecVstupu().
-
vzniklaChyba
public void vzniklaChyba(GRobotException.Chyba chyba)
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania rovnomennej metódy
ObsluhaUdalostí.vzniklaChyba(chyba).
-
stlačenieTlačidlaMyši
public void stlačenieTlačidlaMyši()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.stlačenieTlačidlaMyši(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
stlacenieTlacidlaMysi
public void stlacenieTlacidlaMysi()
Alias pre stlačenieTlačidlaMyši.
-
uvoľnenieTlačidlaMyši
public void uvoľnenieTlačidlaMyši()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.uvoľnenieTlačidlaMyši(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
uvolnenieTlacidlaMysi
public void uvolnenieTlacidlaMysi()
Alias pre uvoľnenieTlačidlaMyši.
-
pohybMyši
public void pohybMyši()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.pohybMyši(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
pohybMysi
public void pohybMysi()
Alias pre pohybMyši.
-
ťahanieMyšou
public void ťahanieMyšou()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.ťahanieMyšou(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
tahanieMysou
public void tahanieMysou()
Alias pre ťahanieMyšou.
-
rolovanieKolieskomMyši
public void rolovanieKolieskomMyši()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.rolovanieKolieskomMyši(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
rolovanieKolieskomMysi
public void rolovanieKolieskomMysi()
Alias pre rolovanieKolieskomMyši.
-
zmenaFokusu
public boolean zmenaFokusu(boolean vpred)
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.zmenaFokusu(vpred).- Parametre:
vpred– ak je hodnotota tohto parametra rovnátrue, tak ide o udalosť zmeny fokusu vpred, v opačnom prípade je hodnota parametra rovnáfalse- Návratová hodnota:
- návratová hodnota určuje, či má aplikácia ďalej spracovať túto udalosť predvoleným mechanizmom zmeny fokusu, alebo nie
-
stlačenieKlávesu
public void stlačenieKlávesu()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.stlačenieKlávesu(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
stlacenieKlavesu
public void stlacenieKlavesu()
Alias pre stlačenieKlávesu.
-
uvoľnenieKlávesu
public void uvoľnenieKlávesu()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.uvoľnenieKlávesu(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
uvolnenieKlavesu
public void uvolnenieKlavesu()
Alias pre uvoľnenieKlávesu.
-
zadanieZnaku
public void zadanieZnaku()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.zadanieZnaku(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
klávesováSkratka
public void klávesováSkratka()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.klávesováSkratka().
-
klavesovaSkratka
public void klavesovaSkratka()
Alias pre klávesováSkratka.
-
ťahanieSúborov
public void ťahanieSúborov()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.ťahanieSúborov().
-
tahanieSuborov
public void tahanieSuborov()
Alias pre ťahanieSúborov.
-
pustenieSúboru
public void pustenieSúboru(String súbor)
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.pustenieSúboru(súbor).Poznámka: Od verzie 2.19 je možné zisťovať akciu pustenia súboru metódou
akciaPustenia.- Parametre:
súbor– úplná cesta a meno súboru
-
pustenieSuboru
public void pustenieSuboru(String súbor)
Alias pre pustenieSúboru.
-
ťahanieUkončené
public void ťahanieUkončené(JComponent zdroj, Transferable údaje, int akcia)
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.ťahanieUkončené(zdroj, údaje, akcia).- Parametre:
zdroj– komponent, ktorý bol zdrojom údajovúdaje– údaje, ktoré boli prenesené, prípadnenull, ak je akciaNONE.akcia– akcia, ktorá bola (s údajmi) vykonaná; pozri aj opis metódyťahajSúbory
-
tahanieUkoncene
public void tahanieUkoncene(JComponent zdroj, Transferable údaje, int akcia)
Alias pre ťahanieUkončené.
-
farbaAktívnehoSlova
public Color farbaAktívnehoSlova(String slovo)
Táto metóda je predvolene prázdna, resp. predvolene vracia hodnotu
null. Je určená na prekrytie v niektorej z tried odvodených od robota.Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.farbaAktívnehoSlova(slovo).- Parametre:
slovo– identifikátor aktívneho slova vnútornej konzoly- Návratová hodnota:
- nová farba aktívneho slova alebo
null - Pozri tiež:
Plátno.vypíšAktívneSlovo(String, Object[])
-
farbaAktivnehoSlova
public Color farbaAktivnehoSlova(String slovo)
Alias pre farbaAktívnehoSlova.
-
aktiváciaOdkazu
public void aktiváciaOdkazu()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.aktiváciaOdkazu(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).
-
aktivaciaOdkazu
public void aktivaciaOdkazu()
Alias pre aktiváciaOdkazu.
-
konfiguráciaZmenená
public boolean konfiguráciaZmenená()
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.konfiguráciaZmenená(), ktorá je historicky staršia (preto mohla nájsť širšie použitie).Upozornenie: Pri prekrývaní tejto reakcie majte na pamäti, že nie je garantované jej automatické vykonanie pri ukončovaní aplikácie (ak vyššia vrstva zistí, že konfigurácia bola zmenená, tak ďalej nevyšetruje, či ju treba, alebo netreba ukladať a automaticky pristúpi k procesu uloženia konfigurácie). Vložte do do tela tejto reakcie len taký kód, ktorý rýchlo overí, či nastali nejaké zmeny v konfigurácii, ktoré treba uložiť a vráti túto informáciu vyššej vrstve.
- Pozri tiež:
Svet.použiKonfiguráciu()
-
konfiguraciaZmenena
public boolean konfiguraciaZmenena()
Alias pre konfiguráciaZmenená.
-
čítajKonfiguráciu
public void čítajKonfiguráciu(Súbor súbor) throws IOException
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.čítajKonfiguráciu(súbor), ktorá je historicky staršia (preto mohla nájsť širšie použitie).- Parametre:
súbor– inštancia triedySúborreprezentujúca otvorený konfiguračný súbor pripravený na čítanie údajov- Výnimky:
IOException– ak vznikla chyba vo vstupno-výstupnej operácii
-
citajKonfiguraciu
public void citajKonfiguraciu(Súbor subor) throws IOException
Alias pre čítajKonfiguráciu.- Výnimky:
IOException
-
zapíšKonfiguráciu
public void zapíšKonfiguráciu(Súbor súbor) throws IOException
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je totožný s opisom fungovania metódy
ObsluhaUdalostí.zapíšKonfiguráciu(súbor), ktorá je historicky staršia (preto mohla nájsť širšie použitie).- Parametre:
súbor– inštancia triedySúborreprezentujúca otvorený konfiguračný súbor pripravený na zápis údajov- Výnimky:
IOException– ak vznikla chyba vo vstupno-výstupnej operácii
-
zapisKonfiguraciu
public void zapisKonfiguraciu(Súbor subor) throws IOException
Alias pre zapíšKonfiguráciu.- Výnimky:
IOException
-
sekvencia
public void sekvencia(int kódSpracovania, Object zdroj, Object cieľ, long stav, long celkovo)Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota. V podstate je reakciou na udalosť, ktorá súvisí s časovo náročným spracovaním údajov počas práce s pevným diskom (pozri aj
ObsluhaUdalostí.sekvencia(kódSpracovania, zdroj, cieľ, stav, celkovo)), napríklad sčítanímazápisomsekvencie PNG súborov (pozri trieduObrázoka jej metódyčítaj(súbor)aulož(súbor, prepísať)) alebo kopírovaním súborov a podobne. Typ udalosti, ktorá spôsobila spustenie tejto reakcie je určený prvým parametrom –kódSpracovania. Ostatné parametre sú naplnené podľa ich relevantnosti.- Parametre:
kódSpracovania– obsahuje kód činnosti, ktorá spôsobila vznik tejto udalosti; aktuálne platné kódy sú:ČÍTANIE_PNG_SEKVENCIE,CHYBA_ČÍTANIA_PNG_SEKVENCIE,ZÁPIS_PNG_SEKVENCIE,ČÍTANIE_GIF_ANIMÁCIE,ZÁPIS_GIF_ANIMÁCIE,KOPÍROVANIE_SÚBOROVPRIPÁJANIE_SÚBOROV,POROVNANIE_SÚBOROV,ODOVZDANIE_ÚDAJOVaPREVZATIE_ÚDAJOVzdroj– objekt súvisiaci so zdrojom alebonull; napríklad v prípade kopírovania súborov je to reťazec s názvom zdrojového súboru, v prípade zápisu PNG sekvencie je to obrázkový objekt so zdrojovou snímkou animácie a podobnecieľ– objekt súvisiaci s cieľom alebonull; napríklad pri kopírovaní súborov je to reťazec s názvom cieľového súboru; v prípade čítania PNG sekvencie je to obrázkový objekt s cieľovou snímkou animácie (čiže tou, do ktorej sú ukladané prečítané údaje) a podobnestav– hodnota vyjadrujúca aktuálne spracovaný objem údajov alebo-1, ak táto hodnota nie je známa alebo je irelevantná; môže to byť počet spracovaných bajtov, poradové číslo snímky a podobnecelkovo– hodnota vyjadrujúca celkový objem údajov, ktorý má byť spracovaný alebo-1, ak táto hodnota nie je známa alebo je irelevantná; môže to byť veľkosť súboru, celkový počet snímok a podobne
-
zastavenieAnimácie
public void zastavenieAnimácie(Obrázok obrázok)
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je úplne totožný s opisom fungovania metódy
ObsluhaUdalostí.zastavenieAnimácie(súbor). V skratke – reakcia je spustená pri zastavení prehrávania animácie obrázka, čo môže byť iniciované automaticky (pozri aj metódu obrázkazastav) alebo na podnet používateľa (programátora).- Parametre:
obrázok– inštancia obrázka, ktorého prehrávanie bolo zastavené
-
zastavenieAnimacie
public void zastavenieAnimacie(Obrázok obrázok)
Alias pre zastavenieAnimácie.
-
ukončenieProcesu
public void ukončenieProcesu(Svet.PríkazovýRiadok príkazovýRiadok, int návratovýKód)
Táto metóda je predvolene prázdna a je určená na prekrytie v niektorej z tried odvodených od robota.
Opis fungovania tejto metódy je úplne totožný s opisom fungovania metódy
ObsluhaUdalostí.ukončenieProcesu(príkazovýRiadok, návratovýKód). V skratke – reakcia je spustená pri ukončenú procesu, ktorý spustila inštancia príkazového riadka.- Parametre:
príkazovýRiadok– inštancia príkazového riadka, ktorá proces spustilanávratovýKód– kód, ktorý vrátil externý proces pri ukončení
-
ukoncenieProcesu
public void ukoncenieProcesu(Svet.PríkazovýRiadok príkazovýRiadok, int návratovýKód)
Alias pre ukončenieProcesu.
-
vymažPôsobisko
public void vymažPôsobisko()
Vymaže pôsobisko, čo je oblasť obdĺžnika, v rámci ktorého robot kreslil od posledného vymazania pôsobiska alebo od posledného použitia niektorej z metód
domov. Pôsobisko sa po vymazaní vždy začína rozširovať od aktuálnych súradníc robota smerom von.
-
vymazPosobisko
public void vymazPosobisko()
Alias pre vymažPôsobisko.
-
pôsobisko
public Rectangle2D pôsobisko()
Umožňuje získať tvar (čo zahŕňa jeho rozmery a polohu) pôsobiska v objekte typu
Rectangle2D. Viac informácií o pôsobisku nájdete napríklad v opise metódvymažPôsobisko,pôsobisko,kresliPôsobiskoa tak ďalej.- Návratová hodnota:
- obdĺžnik typu
Rectangle2D, ktorý reprezentuje aktuálne pôsobisko tohto robota - Pozri tiež:
domov(),vymažPôsobisko(),pôsobisko(Shape),pôsobisko(Poloha),kresliPôsobisko(),kresliPôsobisko(boolean),nekresliPôsobisko(),bodVPôsobisku(double, double),bodVPôsobisku(Poloha),myšVPôsobisku()
-
posobisko
public Rectangle2D posobisko()
Alias pre pôsobisko.
-
pôsobisko
public void pôsobisko(Shape tvar)
Táto metóda umožňuje rozšíriť pôsobisko (pozri napríklad metódu
vymažPôsobisko) o rozmery zadaného tvaru. Pôsobisko je vždy automaticky aktualizované počas kreslenia a pečiatkovania robota, ale v niektorých prípadoch môže byť užitočné rozšíriť pôsobisko o tvar, ktorý robot priamo nenakreslil. Napríklad o tvar, ktorý bol nakreslený na plátno metódoupodlaha.kresli(…), čo je typ kreslenia, za ktoré nie je zodpovedný priamo robot. Pri kreslení sú len použité jeho vlastnosti, robot je teda iba využitý ako referencia, nič iné. Preto sa pri tomto type kreslenia pôsobisko nerozširuje automaticky. Takých metód je v rámci všetkých tried programovacieho rámca viac.- Parametre:
tvar– tvar, ktorého rozmery budú započítané do pôsobiska- Pozri tiež:
domov(),vymažPôsobisko(),pôsobisko(),pôsobisko(Poloha),kresliPôsobisko(),kresliPôsobisko(boolean),nekresliPôsobisko(),bodVPôsobisku(double, double),bodVPôsobisku(Poloha),myšVPôsobisku()
-
pôsobisko
public void pôsobisko(Poloha bod)
Táto metóda umožňuje rozšíriť pôsobisko tak, aby obsahovalo zadaný bod. Pre viac informácií pozri metódu
pôsobisko.- Parametre:
bod– bod, ktorého súradnice budú započítané do pôsobiska- Pozri tiež:
domov(),vymažPôsobisko(),pôsobisko(),pôsobisko(Shape),kresliPôsobisko(),kresliPôsobisko(boolean),nekresliPôsobisko(),bodVPôsobisku(double, double),bodVPôsobisku(Poloha),myšVPôsobisku()
-
kresliPôsobisko
public void kresliPôsobisko()
Zvýrazní oblasť obdĺžnika – pôsobisko, v rámci ktorého robot kreslil od posledného vymazania pôsobiska alebo od posledného použitia niektorej z metód
domov. Pôsobisko je použiteľné napríklad s metódamimyšVPôsobiskualebobodVPôsobisku.Pôsobisko je rozširované dynamicky – pri každom kreslení aktuálnym robotom, sú porovnané hranice pôsobiska so súradnicami a rozmermi kresleného útvaru a podľa nich je upravená aktuálna veľkosť pôsobiska. Pôsobisko je možné vymazať buď volaním metódy
vymažPôsobisko, alebo použitím niektorej z metóddomov.
-
kresliPosobisko
public void kresliPosobisko()
Alias pre kresliPôsobisko.
-
kresliPôsobisko
public void kresliPôsobisko(boolean ánoNie)
Zapne alebo vypne kreslenie tzv. pôsobiska – oblasti, v rámci ktorej robot kreslil od posledného vymazania pôsobiska alebo od posledného použitia niektorej z metód
domov. Na zíkanie ďalších informácií pozri metódynekresliPôsobisko,kresliPôsobiskoatď.- Parametre:
ánoNie– ak je zadaná hodnotatrue, kreslenie (zvýrazňovanie) pôsobiska bude zapnuté, inak bude vypnuté- Pozri tiež:
domov(),vymažPôsobisko(),pôsobisko(),pôsobisko(Shape),pôsobisko(Poloha),kresliPôsobisko(),nekresliPôsobisko(),bodVPôsobisku(double, double),bodVPôsobisku(Poloha),myšVPôsobisku()
-
kresliPosobisko
public void kresliPosobisko(boolean ánoNie)
Alias pre kresliPôsobisko.
-
nekresliPôsobisko
public void nekresliPôsobisko()
Skryje zvýraznenie oblasti pôsobiska, ktoré bolo zapnuté metódou
kresliPôsobisko.
-
nekresliPosobisko
public void nekresliPosobisko()
Alias pre nekresliPôsobisko.
-
bodVPôsobisku
public boolean bodVPôsobisku(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa aktuálne súradnice zadaného bodu nachádzajú v oblasti obdĺžnika, v rámci ktorého bolo zaznamenané kreslenie aktuálnym robotom. Tento obdĺžnik nazývame pôsobisko. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVPôsobisku(Poloha objekt).Pôsobisko je rozširované dynamicky – pri každom kreslení aktuálnym robotom, sú porovnané hranice pôsobiska so súradnicami a rozmermi kresleného útvaru a podľa nich je upravená aktuálna veľkosť pôsobiska. Pri použití niektorej z metód
domov, je pôsobisko zmenšené na nulu.- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
domov(),vymažPôsobisko(),kresliPôsobisko(),bodVKruhu(double, double, double),bodVElipse(double, double, double, double),bodVoŠtvorci(double, double, double),bodVObdĺžniku(double, double, double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVPosobisku
public boolean bodVPosobisku(double súradnicaBoduX, double súradnicaBoduY) Alias pre bodVPôsobisku.
-
bodVPôsobisku
public boolean bodVPôsobisku(Poloha objekt)
Funguje rovnako ako metóda
bodVPôsobisku(x, y), len namiesto súradníc bodu je použitá poloha zadaného robota…- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodu- Návratová hodnota:
true/false- Pozri tiež:
domov(),vymažPôsobisko(),kresliPôsobisko(),bodVKruhu(Poloha, double),bodVElipse(Poloha, double, double),bodVoŠtvorci(Poloha, double),bodVObdĺžniku(Poloha, double, double),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVPosobisku
public boolean bodVPosobisku(Poloha objekt)
Alias pre bodVPôsobisku.
-
myšVPôsobisku
public boolean myšVPôsobisku()
Zistí, či sa aktuálne súradnice myši nachádzajú v oblasti obdĺžnika, v rámci ktorého bolo zaznamenané kreslenie aktuálnym robotom. Tento obdĺžnik nazývame pôsobisko.
Pôsobisko je rozširované dynamicky – pri každom kreslení aktuálnym robotom, sú porovnané hranice pôsobiska so súradnicami a rozmermi kresleného útvaru a podľa nich je upravená aktuálna veľkosť pôsobiska. Pri použití niektorej z metód
domov, je pôsobisko zmenšené na nulu.- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
domov(),vymažPôsobisko(),kresliPôsobisko(),myšVCeste(),myšVElipse(double, double),myšVKruhu(double),myšVoŠtvorci(double),myšVObdĺžniku(double, double),myšVHviezde(double),myšVOblasti(Area),myšVKruhu()
-
mysVPosobisku
public boolean mysVPosobisku()
Alias pre myšVPôsobisku.
-
spôsobOhraničenia
public int spôsobOhraničenia()
Táto metóda vracia aktuálny spôsob ohraničenia robota pri jeho pohybe:
ODRAZ,PLOT,PRETOČaleboŽIADNE. Podrobnosti o ohraničení sú v opise metódyohranič(vľavo, dole, vpravo, hore, spôsob).Príklad použitia mechanizmu ohraničenia nájdete v opise metódy
mimoHraníc.
-
sposobOhranicenia
public int sposobOhranicenia()
Alias pre spôsobOhraničenia.
-
hraniceOhraničenia
public double[] hraniceOhraničenia()
Táto metóda vráti pole hraníc alebo hodnotu
null. Ak je ohraničenie aktívne, tak táto metóda vracia reálnočíselné pole s aktuálnymi pevnými hranicami ohraničenia, ktoré boli vypočítané podľa polohy robota a zadaných vzdialeností pri aktivácii ohraničenia. Hranice nasledujú v poradí: ľavá, dolná, pravá a horná. Ak nie je ohraničenie aktívne, tak táto metóda vracia hodnotunull.- Návratová hodnota:
- reálnočíselné pole s aktuálnymi pevnými hranicami
ohraničenia alebo hodnota
null
-
hraniceOhranicenia
public double[] hraniceOhranicenia()
Alias pre hraniceOhraničenia.
-
vypniOhraničenie
public void vypniOhraničenie()
Dočasne vypne ohraničenie robota, ak je zapnuté. To znamená, že volanie tejto metódy nemá zmysel, ak je ohraničenie vypnuté.
-
vypniOhranicenie
public void vypniOhranicenie()
Alias pre vypniOhraničenie.
-
zapniOhraničenie
public void zapniOhraničenie()
Opätovne zapne ohraničenie robota, ak bolo predtým aktívne, ale bolo vypnuté metódou
vypniOhraničenie.To znamená, že volanie tejto metódy nemá zmysel buď ak je ohraničenie aktívne, alebo ak nebolo predtým vypnuté metódouvypniOhraničenie.
-
zapniOhranicenie
public void zapniOhranicenie()
Alias pre zapniOhraničenie.
-
ohranič
public void ohranič(double ľaváHranica, double dolnáHranica, double praváHranica, double hornáHranica, int spôsob)Zapne alebo vypne kontrolu polohy robota počas jeho pohybu prostredníctvom určenia vzdialenosti štyroch hraníc od aktuálnej polohy robota a spôsobu ohraničenia. Prvé štyri parametre určujú vzdialenosti ohraničenia od aktuálnej polohy robota a posledný parameter určuje spôsob kontroly polohy.
Rámec podporuje tri spôsoby kontroly. Všetky tri boli implementované s dôrazom na výpočtovú jednoduchosť. Dôsledkom tohto prístupu je to, že každý zo spôsobov garantuje iba správnosť cieľovej polohy, nie fyzikálnu správnosť trasy, po ktorej sa do nej robot dostane. V nasledujúcich troch krátkych sekciách opíšeme, ako jednotlivé spôsoby fungujú.
Pretočenie (predvolený spôsob)
Pretočenie je najpriamočiarejší (a zároveň pre iné verzie tejto metódy predvolený) spôsob obmedzenia priestoru pohybu robota. Robot sa po prekročení niektorého z okrajov presunie k protiľahlému okraju (jeho poloha sa pretočí) a pokračuje v pohybe týmto spôsobom až do zastavenia.
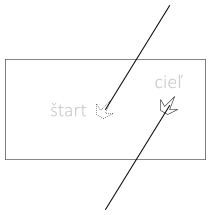
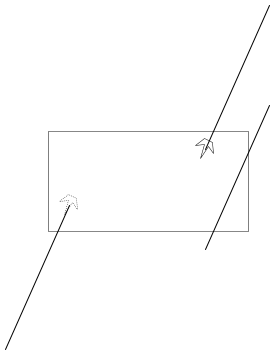
Spôsob pohybu robota pri jednom pretočení sa – cez jeden okraj ohraničenia
(texty na tomto obrázku vysvetľujú spôsob označenia počiatočnej polohy robota).Dvojnásobné pretočenie robota
(čiara úplne vpravo je stredná časť jeho cesty).Oplotenie obmedzuje pohyb robota tak, aby jeho cieľová poloha ležala čo najbližšie k miestu, do ktorého by prišiel, keby jeho pohyb nebol obmedzovaný. Tento pohyb sa podobá situácii, v ktorej by postavička reprezentovaná robotom kĺzala po hranách ohraničenia tak, ako keby jej v pohybe bránil nejaký múr, stena alebo plot – z čoho je odvodený názov tohto spôsobu obmedzenia pohybu robota.
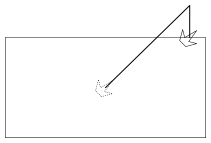
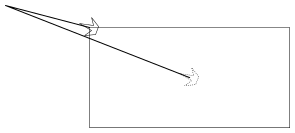
Kontakt s jednou hranou ohraničenia.
Kontakt s dvomi hranami ohraničenia.
Tento spôsob spracovania je ekvivalentný situácii, v ktorej by sa postavička reprezentovaná robotom odrážala od stien ohraničenia až do zastavenia. Garantovaná je len cieľová poloha, nie korektnosť dráhy pohybu. Robot tiež pri odrážaní sa nemení smer (v zmysle svojej orientácie – aktuálneho uhla pootočenia).
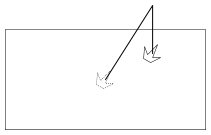
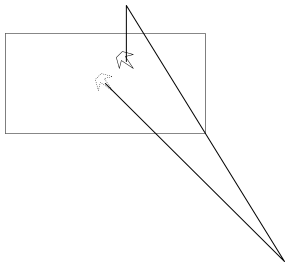
Odrazenie sa od jedného okraja.
Viacnásobné odrazenie sa.
Keďže priorita pri implementácii (všetkých spôsobov ohraničenia, nielen tohto) bola kladená na výpočtovú jednoduchosť, nie je ani pri jednom spôsobe garantované, že zaznamenaná dráha nebude obsahovať body za hranicami ohraničenia priestoru pohybu robota, garantovaná je len cieľová poloha. Tá pri tomto spôsobe ohraničenia zodpovedá miestu, ktoré by robot dosiahol pri odrážaní sa od stien ohraničenia pri zachovaní celkovej dĺžky dráhy pohybu, ale jeho skutočná (matematicky zjednodušená) dráha nezodpovedá fyzikálne korektnému záznamu dráhy pri takomto odrážaní sa.
Rozdiely ukazujú nasledujúce obrázky:
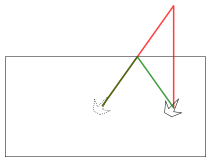
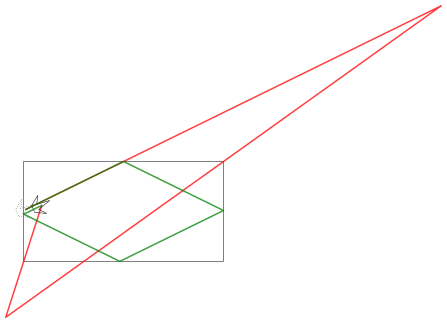
Porovnanie fyzikálne správnych odrazení (zelené čiary) so skutočnými výpočtovo menej náročnými dráhami robota (červené čiary)
(všimnite si, že v druhom prípade obsahuje skutočná (matematicky zjednodušená) dráha len tri čiary, pričom fyzikálne korektná dráha by ich obsahovala päť).Implementácia ohraničenia je príkladom toho, ako sa rôznymi spôsobmi dá výpočtovo (matematicky) dospieť k rovnakému riešeniu (v tomto prípade cieľovej polohe), pričom medzivýsledky môžu byť nielen rôzne, ale dokonca fyzikálne nesprávne. Takéto spôsoby riešenia sú vhodné v prípade, keď záleží viac na jednoduchosti výpočtu, než na detailnej fyzikálnej korektnosti.
Príklad použitia mechanizmu ohraničenia nájdete v opise metódy
mimoHraníc.
Otázky (Q) a odpovede (A):Q: Prečo sa nedá ohraničenie nastaviť aj inak? A: Z bezpečnostných dôvodov. (Pozri aj odpoveď nižšie.) Q: Prečo je ohraničenie nastavované vždy so stredom na aktuálnej polohe? Nedalo by sa zadať ako parameter ľubovoľný bod? A: Nie, pretože potom by do tejto metódy musel byť zakomponovaný celý mechanizmus kontroly opustenia hraníc (pozri napríklad aj reakciu mimoHraníc), čo by bolo zbytočne komplikované a riskantné.- Parametre:
ľaváHranica– vzdialenosť od robota určujúca ľavé ohraničeniedolnáHranica– vzdialenosť od robota určujúca dolné ohraničeniepraváHranica– vzdialenosť od robota určujúca pravé ohraničeniehornáHranica– vzdialenosť od robota určujúca horné ohraničeniespôsob– celočíselná hodnota určujúca spôsob spracovania ohraničenia; použite konštanty:ODRAZ,PLOT,PRETOČaleboŽIADNE, pričom pri poslednej hodnote budú hodnoty hraníc ignorované (ohraničenie bude vypnuté)- Pozri tiež:
vypniOhraničenie(),zapniOhraničenie()
-
ohranic
public void ohranic(double ľaváHranica, double dolnáHranica, double praváHranica, double hornáHranica, int spôsob) Alias pre ohranič.
-
ohranič
public void ohranič(double ľaváHranica, double dolnáHranica, double praváHranica, double hornáHranica)Nastaví nové ohraničenie polohy robota počas jeho pohybu s predvoleným spôsobom ohraničenia
PRETOČ. Ďalšie podrobnosti o ohraničení nájdete v opise metódyohranič(vľavo, dole, vpravo, hore, spôsob).Príklad použitia mechanizmu ohraničenia nájdete v opise metódy
mimoHraníc.- Parametre:
ľaváHranica– vzdialenosť od robota určujúca ľavé ohraničeniedolnáHranica– vzdialenosť od robota určujúca dolné ohraničeniepraváHranica– vzdialenosť od robota určujúca pravé ohraničeniehornáHranica– vzdialenosť od robota určujúca horné ohraničenie
-
ohranic
public void ohranic(double ľaváHranica, double dolnáHranica, double praváHranica, double hornáHranica) Alias pre ohranič.
-
ohranič
public void ohranič(double horizontálneHranice, double vertikálneHranice, int spôsob)Zapne alebo vypne kontrolu polohy robota počas jeho pohybu prostredníctvom určenia vzdialenosti dvojice horizontálnych a vertikálnych hraníc od aktuálnej polohy robota a spôsobu ohraničenia. Prvé dva parametre určujú vzdialenosti ohraničenia od aktuálnej polohy robota a tretí spôsob kontroly polohy. Ďalšie podrobnosti o ohraničení nájdete v opise metódy
ohranič(vľavo, dole, vpravo, hore, spôsob).Príklad použitia mechanizmu ohraničenia nájdete v opise metódy
mimoHraníc.- Parametre:
horizontálneHranice– vzdialenosť od robota symetricky určujúca ľavé a pravé ohraničenievertikálneHranice– vzdialenosť od robota symetricky určujúca dolné a horné ohraničeniespôsob– celočíselná hodnota určujúca spôsob spracovania ohraničenia; použite konštanty:ODRAZ,PLOT,PRETOČaleboŽIADNE, pričom pri poslednej hodnote budú hodnoty hraníc ignorované (ohraničenie bude vypnuté)
-
ohranic
public void ohranic(double horizontálneHranice, double vertikálneHranice, int spôsob) Alias pre ohranič.
-
ohranič
public void ohranič(double horizontálneHranice, double vertikálneHranice)Nastaví nové ohraničenie polohy robota počas jeho pohybu s predvoleným spôsobom ohraničenia
PRETOČ. Ďalšie podrobnosti o ohraničení nájdete v opise metódyohranič(vľavo, dole, vpravo, hore, spôsob).Príklad použitia mechanizmu ohraničenia nájdete v opise metódy
mimoHraníc.- Parametre:
horizontálneHranice– vzdialenosť od robota symetricky určujúca ľavé a pravé ohraničenievertikálneHranice– vzdialenosť od robota symetricky určujúca dolné a horné ohraničenie
-
ohranic
public void ohranic(double horizontálneHranice, double vertikálneHranice) Alias pre ohranič.
-
ohranič
public void ohranič(int spôsob)
Nastaví nové ohraničenie polohy robota počas jeho pohybu so zadaným spôsobom ohraničenia a podľa rozmerov kresliacej plochy, na ktorú má robot nasmerované kreslenie. To môže byť niektoré plátno – podlaha/strop alebo nejaký cieľový obrázok… Pripomíname, že hranice sú nastavené od aktuálnej polohy robota, čiže na úplné pokrytie kresliacej plochy je potrebné, aby sa robot v čase nastavovania ohraničenia nachádzal v strede kresliacej polochy, inak bude plocha ohraničeného priestoru nesymetrická – na jednej strane bude robotu dovolené opustiť plochu kresliaceho plátna (obrázka) a na protiľahlej strane bude jeho pohyb obmedzený ešte pred okrajom plátna. Ďalšie podrobnosti o ohraničení nájdete v opise metódy
ohranič(vľavo, dole, vpravo, hore, spôsob).Príklad použitia mechanizmu ohraničenia nájdete v opise metódy
mimoHraníc.
-
ohranic
public void ohranic(int spôsob)
Alias pre ohranič.
-
ohranič
public void ohranič()
Nastaví nové ohraničenie polohy robota počas jeho pohybu s predvoleným spôsobom ohraničenia
PRETOČa podľa rozmerov kresliacej plochy, na ktorú má robot nasmerované kreslenie. O hraniciach ďalej platia rovnaké informácie, ktoré sú uvedené v opise metódyohranič(spôsob).Príklad použitia mechanizmu ohraničenia nájdete v opise metódy
mimoHraníc.
-
ohranic
public void ohranic()
Alias pre ohranič.
-
farbaBodu
public Farba farbaBodu()
Zistí farbu bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí. Ak sa robot nachádza mimo kresliaceho plátna, je vrátená inštancia farebnosti
žiadna. So získanou farbou môžeme ďalej pracovať – napríklad ju upravovať alebo zisťovať jej vlastnosti (farebné zložky, priehľadnosť…). Testovať, či má bod konkrétnu farbu, môžeme napríklad pomocou metódyfarbaBodu(farba).
-
farbaBodu
public boolean farbaBodu(Color farba)
Zistí, či farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí je zhodná so zadanou farbou. Ak sa robot nachádza mimo kresliaceho plátna, je vrátená hodnota
false. Testovať farbu pomocou tejto metódy môžeme napríklad takto:if(farbaBodu(modrá)) …- Parametre:
farba– farba, ktorú chceme porovnať s farbou bodu na plátne- Návratová hodnota:
trueak sa robot nachádza v rámci rozmerov plátna a farba bodu na mieste robota sa zhoduje so zadanou farbou (musia sa zhodovať všetky tri farebné zložky aj úroveň priehľadnosti), inakfalse
-
farbaBodu
public boolean farbaBodu(Farebnosť objekt)
Zistí, či farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí je zhodná s farbou zadaného objektu. Ak sa robot nachádza mimo kresliaceho plátna, je vrátená hodnota
false. Testovať farbu pomocou tejto metódy môžeme napríklad takto:if(farbaBodu(modrá)) …- Parametre:
objekt– objekt, ktorého farbu porovnávame s farbou bodu- Návratová hodnota:
trueak sa robot nachádza v rámci rozmerov plátna a farba bodu na mieste robota sa zhoduje s farbou zadaného objektu (musia sa zhodovať všetky tri farebné zložky aj úroveň priehľadnosti), inakfalse
-
farbaBodu
public boolean farbaBodu(int r, int g, int b)Zistí, či farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí je zhodná s farbou zadanou prostredníctvom farebných zložiek. (Úroveň priehľadnosti je nastavená na hodnotu
255, čiže na úplne nepriehľadnú farbu.) Ak sa robot nachádza mimo kresliaceho plátna, je vrátená hodnotafalse.- Parametre:
r– červená zložka farby, ktorú chceme porovnať s farbou bodu na plátneg– červená zložka farby, ktorú chceme porovnať s farbou bodu na plátneb– červená zložka farby, ktorú chceme porovnať s farbou bodu na plátne- Návratová hodnota:
trueak sa robot nachádza v rámci rozmerov plátna a farba bodu na mieste robota sa zhoduje so zadanou farbou (musia sa zhodovať všetky tri farebné zložky aj úroveň priehľadnosti), inakfalse
-
farbaBodu
public boolean farbaBodu(int r, int g, int b, int a)Zistí, či farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) v mieste, kde robot práve stojí je zhodná s farbou zadanou prostredníctvom farebných zložiek a úrovne priehľadnosti. Ak sa robot nachádza mimo kresliaceho plátna, je vrátená hodnota
false.- Parametre:
r– červená zložka farby, ktorú chceme porovnať s farbou bodu na plátneg– červená zložka farby, ktorú chceme porovnať s farbou bodu na plátneb– červená zložka farby, ktorú chceme porovnať s farbou bodu na plátnea– úroveň priehľadnosti farby, ktorú chceme porovnať s farbou bodu na plátne- Návratová hodnota:
trueak sa robot nachádza v rámci rozmerov plátna a farba bodu na mieste robota sa zhoduje so zadanou farbou (musia sa zhodovať všetky tri farebné zložky aj úroveň priehľadnosti), inakfalse
-
farbaNaMyši
public Farba farbaNaMyši()
Zistí farbu bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši. So získanou farbou môžeme ďalej pracovať – napríklad ju upravovať alebo zisťovať jej vlastnosti (farebné zložky, priehľadnosť…). Testovať, či má bod konkrétnu farbu môžeme napríklad pomocou metódy
farbaNaMyši(farba).Poznámka: Ak by súradnice myši boli náhodou mimo aktívneho kresliaceho plátna robota, metóda by vrátila inštanciu farby
žiadna.- Návratová hodnota:
- farba bodu (objekt typu
Farba) na pozícii myši
-
farbaNaMysi
public Farba farbaNaMysi()
Alias pre farbaNaMyši.
-
farbaNaMyši
public boolean farbaNaMyši(Color farba)
Zistí, či je farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši zhodná so zadanou farbou. Testovať farbu pomocou tejto metódy môžeme napríklad takto:
if(farbaNaMyši(modrá)) …Poznámka: Ak by súradnice myši boli náhodou mimo aktívneho kresliaceho plátna robota, metóda by vrátila hodnotu
false.Príklad:
Príklad nakreslí čierny kruh do stredu plátna (teda v prípade, že začíname s predvolenými vlastnosťami robota), vytvorí obsluhu udalostí, v rámci ktorej bude testovať, či je farba bodu na súradniciach myši čierna a ak je, tak pípne.
kruh(15);newObsluhaUdalostí() {@OverridepublicvoidpohybMyši() {if(farbaNaMyši(čierna)) {Svet.pípni(); } } };- Parametre:
farba– farba, ktorú chceme porovnať s farbou bodu na plátne- Návratová hodnota:
trueak je farba bodu na súradniciach myši zhodná so zadanou farbou (musia sa zhodovať všetky tri farebné zložky aj úroveň priehľadnosti), inakfalse
-
farbaNaMysi
public boolean farbaNaMysi(Color farba)
Alias pre farbaNaMyši.
-
farbaNaMyši
public boolean farbaNaMyši(Farebnosť objekt)
Zistí, či je farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši zhodná s farbou zadaného objektu.
Poznámka: Ak by súradnice myši boli náhodou mimo aktívneho kresliaceho plátna robota, metóda by vrátila hodnotu
false.- Parametre:
objekt– objekt, ktorého farbu porovnávame s farbou bodu- Návratová hodnota:
trueak je farba bodu na súradniciach myši zhodná s farbou zadaného objektu (musia sa zhodovať všetky tri farebné zložky aj úroveň priehľadnosti), inakfalse
-
farbaNaMysi
public boolean farbaNaMysi(Farebnosť objekt)
Alias pre farbaNaMyši.
-
farbaNaMyši
public boolean farbaNaMyši(int r, int g, int b)Zistí, či je farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši zhodná s farbou zadanou prostredníctvom farebných zložiek. (Úroveň priehľadnosti je nastavená na hodnotu
255, čiže na úplne nepriehľadnú farbu.)Poznámka: Ak by súradnice myši boli náhodou mimo aktívneho kresliaceho plátna robota, metóda by vrátila hodnotu
false.- Parametre:
r– červená zložka farby, ktorú chceme porovnať s farbou bodu na súradniciach myšig– červená zložka farby, ktorú chceme porovnať s farbou bodu na súradniciach myšib– červená zložka farby, ktorú chceme porovnať s farbou bodu na súradniciach myši- Návratová hodnota:
trueak je farba bodu na súradniciach myši zhodná so zadanou farbou (musia sa zhodovať všetky tri farebné zložky aj úroveň priehľadnosti), inakfalse
-
farbaNaMysi
public boolean farbaNaMysi(int r, int g, int b) Alias pre farbaNaMyši.
-
farbaNaMyši
public boolean farbaNaMyši(int r, int g, int b, int a)Zistí, či je farba bodu (jedného pixela) aktívneho plátna robota (podlahy alebo stropu) na súradniciach myši zhodná s farbou zadanou prostredníctvom farebných zložiek a úrovne priehľadnosti.
Poznámka: Ak by súradnice myši boli náhodou mimo aktívneho kresliaceho plátna robota, metóda by vrátila hodnotu
false.- Parametre:
r– červená zložka farby, ktorú chceme porovnať s farbou bodu na súradniciach myšig– červená zložka farby, ktorú chceme porovnať s farbou bodu na súradniciach myšib– červená zložka farby, ktorú chceme porovnať s farbou bodu na súradniciach myšia– úroveň priehľadnosti farby, ktorú chceme porovnať s farbou bodu na súradniciach myši- Návratová hodnota:
trueak je farba bodu na súradniciach myši zhodná so zadanou farbou (musia sa zhodovať všetky tri farebné zložky aj úroveň priehľadnosti), inakfalse
-
farbaNaMysi
public boolean farbaNaMysi(int r, int g, int b, int a) Alias pre farbaNaMyši.
-
vylejFarbu
public void vylejFarbu()
Robot vyleje na svojej pozícii na aktívne plátno alebo do obrázka, kam bolo presmerované jeho kreslenie, svoju farbu, ktorá sa odtiaľ rozšíri po okraje okolitej kresby. Na ďalšie informácie pozri metódu
Plátno.vylejFarbu(double, double, Color). Správanie tejto metódy sa riadi rovnakými pravidlami.Príklad:
V tomto príklade ide o vypĺňanie „čmáranice“ náhodnými farbami klikaním myšou (pozri zoznam zmien: poďakovanie uvedené pri verzii 1.35):
// Najskôr nakreslíme na plátno „čmáranicu“:Svet.farbaPozadia(modrá);hrúbkaČiary(1.5);farba(biela);skry();náhodnáPoloha();for(intj =0; j <30; ++j) {choďNa(Svet.náhodnéReálneČíslo(Svet.ľavýOkraj(),Svet.pravýOkraj()),Svet.náhodnéReálneČíslo(Svet.dolnýOkraj(),Svet.hornýOkraj())); }// Potom definujeme obsluhu udalostí, v ktorej sa postaráme// o vypĺňanie častí obrazca náhodou farbou…newObsluhaUdalostí() {@Overridepublicvoidklik() {farba((int)Svet.náhodnéCeléČíslo(0,255), (int)Svet.náhodnéCeléČíslo(0,255), (int)Svet.náhodnéCeléČíslo(0,255));skočNaMyš();vylejFarbu(); } };Výsledok:
Ukážka čiastočne vyplnenej náhodne generovanej „čmáranice.“
-
kresliNaPodlahu
public void kresliNaPodlahu()
Po použití tejto metódy bude tento robot kresliť na plátno podlahy (predvolený stav). Ak chceme, aby robot kreslil na strop, použijeme metódu
kresliNaStrop().
-
kresliNaStrop
public void kresliNaStrop()
Po použití tejto metódy bude tento robot kresliť na plátno stropu. Ak chceme, aby robot kreslil na podlahu, použijeme metódu
kresliNaPodlahu().
-
kreslímNaPodlahu
public boolean kreslímNaPodlahu()
Overí, či tento robot kreslí na podlahu, teda, či je podlaha aktívnym plátnom robota. Podobne sa dá overiť kreslenie na strop.
Poznámka: Názov tejto metódy je úmyselne uvedený v prvej osobe jednotného čísla (
kreslímNaPodlahu), pretože diakritický alias otázky v tretej osobe (kreslíNaPodlahu? –kresliNaPodlahu?) bol v konflikte s rozkazovacím spôsobom príbuzných metód (kresliNaPodlahu!).- Návratová hodnota:
trueak aktívne plátno robota je podlaha, inakfalse
-
kreslimNaPodlahu
public boolean kreslimNaPodlahu()
Alias pre kreslímNaPodlahu.
-
kreslímNaStrop
public boolean kreslímNaStrop()
Overí, či tento robot kreslí na strop, teda, či je strop aktívnym plátnom robota. Podobne sa dá overiť kreslenie na podlahu.
Poznámka: Názov tejto metódy je úmyselne uvedený v prvej osobe jednotného čísla (
kreslímNaStrop), pretože diakritický alias otázky v tretej osobe (kreslíNaStrop? –kresliNaStrop?) bol v konflikte s rozkazovacím spôsobom príbuzných metód (kresliNaStrop!).- Návratová hodnota:
trueak aktívne plátno robota je strop, inakfalse
-
kreslimNaStrop
public boolean kreslimNaStrop()
Alias pre kreslímNaStrop.
-
vyplň
public void vyplň()
Vyplní aktívne plátno alebo obrázok, do ktorého má robot presmerované kreslenie, aktuálnou farbou kreslenia alebo náterom robota.
-
vypln
public void vypln()
Alias pre vyplň.
-
kresliNaObrázok
public void kresliNaObrázok(Obrázok obrázok)
Presmeruje kreslenie tohto robota do určeného obrázka.
- Parametre:
obrázok– cieľový obrázok
-
kresliNaObrazok
public void kresliNaObrazok(Obrázok obrázok)
Alias pre kresliNaObrázok.
-
kresliDoObrázka
public void kresliDoObrázka(Obrázok obrázok)
Alias pre kresliNaObrázok.
-
kresliDoObrazka
public void kresliDoObrazka(Obrázok obrázok)
Alias pre kresliNaObrázok.
-
kreslímNaObrázok
public boolean kreslímNaObrázok(Obrázok obrázok)
Zistí, či je kreslenie tohto robota presmerované do určeného obrázka.
Poznámka: Názov tejto metódy je úmyselne uvedený v prvej osobe jednotného čísla, aby bol v súlade s názvami metód
kreslímNaPodlahuakreslímNaStrop, pri ktorých nebola iná možnosť na pomenovanie (podrobnosti sú uvedené v poznámkach v ich opisoch).- Parametre:
obrázok– obrázok
-
kreslimNaObrazok
public boolean kreslimNaObrazok(Obrázok obrázok)
Alias pre kreslímNaObrázok.
-
kreslímDoObrázka
public boolean kreslímDoObrázka(Obrázok obrázok)
Alias pre kreslímNaObrázok.
-
kreslimDoObrazka
public boolean kreslimDoObrazka(Obrázok obrázok)
Alias pre kreslímNaObrázok.
-
kreslímNaObrázok
public Obrázok kreslímNaObrázok()
Ak je kreslenie tohto robota presmerované do obrázka (inštancie triedy
Obrázok), tak táto metóda túto inštanciu vráti. V opačnom prípade (čiže ak je kreslenie nasmerované na podlahu alebo strop) vráti metóda hodnotunull.Poznámka: Názov tejto metódy je úmyselne uvedený v prvej osobe jednotného čísla, aby bol v súlade s názvami metód
kreslímNaPodlahuakreslímNaStrop, pri ktorých nebola iná možnosť na pomenovanie. Podrobnosti sú uvedené v poznámkach v ich opisoch.- Návratová hodnota:
- inštancia typu
Obrázokalebonull
-
kreslimNaObrazok
public Obrázok kreslimNaObrazok()
Alias pre kreslímNaObrázok.
-
kreslímDoObrázka
public Obrázok kreslímDoObrázka()
Alias pre kreslímNaObrázok.
-
kreslimDoObrazka
public Obrázok kreslimDoObrazka()
Alias pre kreslímNaObrázok.
-
grafika
public Graphics2D grafika()
Vráti (na technické účely) aktuálny grafický objekt používaný týmto robotom. (Definícia tejto metódy sa stala nevyhnutnou so vznikom triedy
Tlač.)
-
obrázok
public BufferedImage obrázok()
Vráti (na technické účely) aktuálny obrázok, na ktorý tento robot kreslí. (Definícia tejto metódy dopĺňa definíciu metódy
grafika.)
-
obrazok
public BufferedImage obrazok()
Alias pre obrázok.
-
začniKreslenie
public void začniKreslenie(Graphics2D g2d)
Táto metóda je určená na implementáciu vlastného kreslenia robotom s použitím externého grafického objektu
Graphics2D. Má byť spustená pred začatím práce s týmto objektom a po skončení práce musí byť volaná párujúca metódaskončiKreslenie(s tým istým objektom grafiky v parametri).- Parametre:
g2d– objekt, ktorého vlastnosti majú byť nastavené podľa vlastností tohto robota
-
skončiKreslenie
public void skončiKreslenie(Graphics2D g2d)
Táto metóda je určená na implementáciu vlastného kreslenia robotom s použitím externého grafického objektu
Graphics2D. Má byť spustená po ukončení práce s týmto objektom, pričom pred začatím práce musí byť volaná párujúca metódazačniKreslenie(s tým istým objektom grafiky v parametri).- Parametre:
g2d– objekt, ktorého vlastnosti majú byť obnovené
-
zacniKreslenie
public void zacniKreslenie(Graphics2D g2d)
Alias pre začniKreslenie.
-
skonciKreslenie
public void skonciKreslenie(Graphics2D g2d)
Alias pre skončiKreslenie.
-
začniKreslenie
public void začniKreslenie()
Táto metóda je určená na implementáciu vlastného kreslenia robotom s použitím interného (aktívneho) grafického objektu robota dostupného aj prostredníctvom metódy
grafika. Má byť spustená pred začatím grafických prác za hranicami programovacieho rámca a po skončení prác musí byť volaná párujúca metódaskončiKreslenie(bez parametra).
-
skončiKreslenie
public void skončiKreslenie()
Táto metóda je určená na implementáciu vlastného kreslenia robotom s použitím interného (aktívneho) grafického objektu robota dostupného aj prostredníctvom metódy
grafika. Má byť spustená po ukončení grafických prác za hranicami programovacieho rámca, pričom pred začatím prác musí byť volaná párujúca metódazačniKreslenie(bez parametra).
-
zacniKreslenie
public void zacniKreslenie()
Alias pre začniKreslenie.
-
skonciKreslenie
public void skonciKreslenie()
Alias pre skončiKreslenie.
-
vypĺňajTvary
public void vypĺňajTvary(boolean vypĺňaj)
Upraví spôsob kreslenia tvarov generovaných robotom. Ide o úpravu správania metód
krúžok,elipsa,štvorec,obdĺžnikahviezda(a všetkých ich verzií). Ak má parameter zadanú hodnotutrue, tak v prípade, že je povolené kreslenie tvarov budú uvedené tvary kreslené ako vyplnené plochy, inak budú nakreslené ako obrysy. Spustenie tejto metódy zároveň upraví spôsob kreslenia predvoleného tvaru robota tak, aby bolo v súlade so zadanou hodnotou parametra (trueznamená vyplnený trojzubec afalsedutý).Poznámka: Spôsob kreslenia predvoleného tvaru trojzubca môže byť dodatočne zmenený a preto sa môže odlišovať od aktuálneho stavu vypĺňania tvarov robotom. Na overenie aktuálneho spôsobu kreslenia predvoleného tvaru trojzubca slúži metóda
jePredvolenýTvarVyplnený.- Parametre:
vypĺňaj–truealebofalsepodľa toho, či majú byť tvary vymenované v opise vypĺňané alebo nie- Pozri tiež:
vypĺňaTvary(),kresliTvary(),nekresliTvary(),kreslímTvary(),krúžok(double),krúžok(),elipsa(double, double),elipsa(double),štvorec(double),štvorec(),obdĺžnik(double, double),obdĺžnik(double),hviezda(double),hviezda(),predvolenýTvar(boolean)
-
vyplnajTvary
public void vyplnajTvary(boolean vypĺňaj)
Alias pre vypĺňajTvary.
-
vypĺňajÚtvary
public void vypĺňajÚtvary(boolean vypĺňaj)
Alias pre vypĺňajTvary.
-
vyplnajUtvary
public void vyplnajUtvary(boolean vypĺňaj)
Alias pre vypĺňajTvary.
-
vypĺňajTvary
public void vypĺňajTvary()
Upraví spôsob kreslenia tvarov generovaných robotom. Ide o úpravu správania metód
krúžok,elipsa,štvorec,obdĺžnikahviezda(a všetkých ich verzií). Po spustení tejto metódy budú uvedené tvary kreslené ako vyplnené plochy. Spustenie tejto metódy zároveň upraví spôsob kreslenia predvoleného tvaru robota, ktorý bude teraz vyplneným trojzubcom.- Pozri tiež:
vypĺňajTvary(boolean)
-
vyplnajTvary
public void vyplnajTvary()
Alias pre vypĺňajTvary.
-
vypĺňajÚtvary
public void vypĺňajÚtvary()
Alias pre vypĺňajTvary.
-
vyplnajUtvary
public void vyplnajUtvary()
Alias pre vypĺňajTvary.
-
nevypĺňajTvary
public void nevypĺňajTvary()
Upraví spôsob kreslenia tvarov generovaných robotom. Ide o úpravu správania metód
krúžok,elipsa,štvorec,obdĺžnikahviezda(a všetkých ich verzií). Po spustení tejto metódy budú uvedené tvary kreslené ako obrysy. Spustenie tejto metódy zároveň upraví spôsob kreslenia predvoleného tvaru robota, ktorý bude teraz dutým trojzubcom.- Pozri tiež:
vypĺňajTvary(boolean)
-
nevyplnajTvary
public void nevyplnajTvary()
Alias pre nevypĺňajTvary.
-
nevypĺňajÚtvary
public void nevypĺňajÚtvary()
Alias pre nevypĺňajTvary.
-
nevyplnajUtvary
public void nevyplnajUtvary()
Alias pre nevypĺňajTvary.
-
vypĺňaTvary
public boolean vypĺňaTvary()
Zistí, či je aktivované vypĺňanie tvarov generovaných robotom alebo nie. Stav vypĺňania tvarov súvisí s metódami
krúžok,elipsa,štvorec,obdĺžnikahviezda(a všetkými ich verziami). Ak má vrátený stav hodnotutrue, znamená to, že tvary budú kreslené ako vyplnené plochy, inak budú kreslené ako obrysy (za predpokladu, že je povolené kreslenie tvarov). (Predvolená hodnota tejto vlastnosti jefalse.)- Návratová hodnota:
truealebofalsepodľa toho, či sú tvary vymenované v opise vypĺňané alebo nie- Pozri tiež:
vypĺňajTvary(boolean),kresliTvary(),nekresliTvary(),kreslímTvary(),krúžok(double),krúžok(),elipsa(double, double),elipsa(double),štvorec(double),štvorec(),obdĺžnik(double, double),obdĺžnik(double),hviezda(double),hviezda(),predvolenýTvar(boolean)
-
vyplnaTvary
public boolean vyplnaTvary()
Alias pre vypĺňaTvary.
-
vypĺňaÚtvary
public boolean vypĺňaÚtvary()
Alias pre vypĺňaTvary.
-
vyplnaUtvary
public boolean vyplnaUtvary()
Alias pre vypĺňaTvary.
-
bod
public void bod()
Nakreslí na aktuálnej pozícii robota bod alebo skupinu bodov (kruhovú oblasť) podľa aktuálnej hrúbky pera, najmenej však oblasť s veľkosťou jedného pixela. (To znamená, že hrúbky pera menšie než jeden pixel sú zaokrúhlené na veľkosť jedného pixela.) Na kreslenie je použitá aktuálna farba alebo náter robota.
-
prepíšBod
public void prepíšBod()
Prepíše farebné zložky a zložku priehľadnosti bodu na aktuálnej pozícii robota aktuálnou farbou robota. Metóda prepíše vždy iba jediný bod na aktuálnej pozícii. Neriadi sa veľkosťou pera ani robota.
-
prepisBod
public void prepisBod()
Alias pre prepíšBod.
-
pečiatka
public void pečiatka()
Vytlačí na aktuálnom plátne robota pečiatku v jeho aktuálnom tvare.
-
peciatka
public void peciatka()
Alias pre pečiatka.
-
krúžok
public Shape krúžok(double polomer)
Nakreslí na mieste robota kružnicu alebo kruh so zadaným polomerom. Vyplnenie tvaru (kreslenie kruhu namiesto kružnice) závisí od nastavenia vlastnosti
vypĺňajTvary. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Poznámka: Pri hľadaní pomenovania tejto metódy vznikol terminologický problém. Slovo „krúžok“ bolo použité ako núdzové riešenie situácie, pretože slovenský jazyk striktne rozlišuje kruh ako vyplnený tvar a kružnicu ako nakreslenú čiaru ohraničujúcu tento vyplnený tvar.
- Parametre:
polomer– polomer kruhového útvaru (kruhu alebo kružnice)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je polomer kruhu/kružnice záporný- Pozri tiež:
krúžok(),elipsa(double, double),štvorec(double),obdĺžnik(double, double),hviezda(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kružnica
public Shape kružnica(double polomer)
Nakreslí na mieste robota kružnicu so zadaným polomerom. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
polomer– polomer kružnice- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je polomer kružnice záporný- Pozri tiež:
kružnica(),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kruh
public Shape kruh(double polomer)
Nakreslí na mieste robota kruh so zadaným polomerom. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
polomer– polomer kruhu- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Výnimky:
GRobotException– ak je polomer kruhu záporný- Pozri tiež:
kruh(),kružnica(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
elipsa
public Shape elipsa(double a, double b)
Nakreslí alebo vyplní na mieste robota elipsu so zadanými rozmermi pootočenú v smere robota (predvolený smer robota je 90°). Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.- Parametre:
a– veľkosť hlavnej poloosi (na šírku elipsy)b– veľkosť vedľajšej poloosi (na výšku elipsy)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je niektorý rozmer elipsy záporný- Pozri tiež:
elipsa(double),kružnica(double),kruh(double),štvorec(double),obdĺžnik(double, double),hviezda(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliElipsu
public Shape kresliElipsu(double a, double b)
Nakreslí na mieste robota elipsu so zadanými rozmermi pootočenú v smere robota (predvolený smer robota je 90°). Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
a– veľkosť hlavnej poloosi (na šírku elipsy)b– veľkosť vedľajšej poloosi (na výšku elipsy)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je niektorý rozmer elipsy záporný- Pozri tiež:
elipsa(double),kresliElipsu(double),kružnica(double),kruh(double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplňElipsu
public Shape vyplňElipsu(double a, double b)
Vyplní elipsu so zadanými rozmermi, so stredom na mieste robota a pootočenú v smere robota (predvolený smer robota je 90°). Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
a– veľkosť hlavnej poloosi (na šírku elipsy)b– veľkosť vedľajšej poloosi (na výšku elipsy)- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Výnimky:
GRobotException– ak je niektorý rozmer elipsy záporný- Pozri tiež:
elipsa(double),vyplňElipsu(double),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnElipsu
public Shape vyplnElipsu(double a, double b)
Alias pre vyplňElipsu.
-
vyplnenáElipsa
public Shape vyplnenáElipsa(double a, double b)
Alias pre vyplňElipsu.
-
vyplnenaElipsa
public Shape vyplnenaElipsa(double a, double b)
Alias pre vyplňElipsu.
-
vyplnenúElipsu
public Shape vyplnenúElipsu(double a, double b)
Alias pre vyplňElipsu.
-
vyplnenuElipsu
public Shape vyplnenuElipsu(double a, double b)
Alias pre vyplňElipsu.
-
vyplnenejElipsy
public Shape vyplnenejElipsy(double a, double b)
Alias pre vyplňElipsu.
-
štvorec
public Shape štvorec(double polomer)
Nakreslí alebo vyplní na mieste robota štvorec určený rozmerom vpísanej kružnice a obrátený v smere robota. Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.- Parametre:
polomer– polomer vpísanej kružnice- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je zadaný polomer záporný- Pozri tiež:
štvorec(),kružnica(double),kruh(double),elipsa(double, double),obdĺžnik(double, double),hviezda(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliŠtvorec
public Shape kresliŠtvorec(double polomer)
Nakreslí na mieste robota štvorec určený rozmerom vpísanej kružnice a obrátený v smere robota. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
polomer– polomer vpísanej kružnice- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je zadaný polomer záporný- Pozri tiež:
kresliŠtvorec(),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliStvorec
public Shape kresliStvorec(double polomer)
Alias pre kresliŠtvorec.
-
vyplňŠtvorec
public Shape vyplňŠtvorec(double polomer)
Vyplní štvorec so stredom na mieste robota, obrátený v smere robota a určený polomerom vpísanej kružnice. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
polomer– polomer vpísanej kružnice- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Výnimky:
GRobotException– ak je zadaný polomer záporný- Pozri tiež:
vyplňŠtvorec(),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnStvorec
public Shape vyplnStvorec(double polomer)
Alias pre vyplňŠtvorec.
-
vyplnenýŠtvorec
public Shape vyplnenýŠtvorec(double polomer)
Alias pre vyplňŠtvorec.
-
vyplnenyStvorec
public Shape vyplnenyStvorec(double polomer)
Alias pre vyplňŠtvorec.
-
vyplnenéhoŠtvorca
public Shape vyplnenéhoŠtvorca(double polomer)
Alias pre vyplňŠtvorec.
-
vyplnenehoStvorca
public Shape vyplnenehoStvorca(double polomer)
Alias pre vyplňŠtvorec.
-
obdĺžnik
public Shape obdĺžnik(double a, double b)
Nakreslí alebo vyplní na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota (predvolený smer robota je 90°). Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.- Parametre:
a– veľkosť hlavnej poloosi vpísanej elipsy (na šírku)b– veľkosť vedľajšej poloosi vpísanej elipsy (na výšku)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je niektorý rozmer vpísanej elipsy záporný- Pozri tiež:
obdĺžnik(double),kružnica(double),kruh(double),elipsa(double, double),štvorec(double),hviezda(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliObdĺžnik
public Shape kresliObdĺžnik(double a, double b)
Nakreslí na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota (predvolený smer robota je 90°). Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
a– veľkosť hlavnej poloosi vpísanej elipsy (na šírku)b– veľkosť vedľajšej poloosi vpísanej elipsy (na výšku)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je niektorý rozmer vpísanej elipsy záporný- Pozri tiež:
kresliObdĺžnik(double),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliObdlznik
public Shape kresliObdlznik(double a, double b)
Alias pre kresliObdĺžnik.
-
vyplňObdĺžnik
public Shape vyplňObdĺžnik(double a, double b)
Vyplní obdĺžnik so stredom na mieste robota, obrátený v smere robota a určený rozmermi vpísanej elipsy (predvolený smer robota je 90°). Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
a– veľkosť hlavnej poloosi vpísanej elipsy (na šírku)b– veľkosť vedľajšej poloosi vpísanej elipsy (na výšku)- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Výnimky:
GRobotException– ak je niektorý rozmer vpísanej elipsy záporný- Pozri tiež:
vyplňObdĺžnik(double),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnObdlznik
public Shape vyplnObdlznik(double a, double b)
Alias pre vyplňObdĺžnik.
-
vyplnenýObdĺžnik
public Shape vyplnenýObdĺžnik(double a, double b)
Alias pre vyplňObdĺžnik.
-
vyplnenyObdlznik
public Shape vyplnenyObdlznik(double a, double b)
Alias pre vyplňObdĺžnik.
-
vyplnenéhoObdĺžnika
public Shape vyplnenéhoObdĺžnika(double a, double b)
Alias pre vyplňObdĺžnik.
-
vyplnenehoObdlznika
public Shape vyplnenehoObdlznika(double a, double b)
Alias pre vyplňObdĺžnik.
-
hviezda
public Shape hviezda(double polomer)
Nakreslí alebo vyplní na mieste robota päťcípu hviezdu určenú rozmerom opísanej kružnice a orientovanú v smere robota. Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.- Parametre:
polomer– polomer opísanej kružnice- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je zadaný polomer záporný- Pozri tiež:
hviezda(),kružnica(double),kruh(double),elipsa(double, double),štvorec(double),obdĺžnik(double, double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliHviezdu
public Shape kresliHviezdu(double polomer)
Nakreslí na mieste robota päťcípu hviezdu určenú rozmerom opísanej kružnice a orientovanú v smere robota. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
polomer– polomer opísanej kružnice- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Výnimky:
GRobotException– ak je zadaný polomer záporný- Pozri tiež:
kresliHviezdu(),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),vyplňHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplňHviezdu
public Shape vyplňHviezdu(double polomer)
Vyplní päťcípu hviezdu so stredom na mieste robota, orientovanú v smere robota a určenú polomerom opísanej kružnice. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
- Parametre:
polomer– polomer opísanej kružnice- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Výnimky:
GRobotException– ak je zadaný polomer záporný- Pozri tiež:
vyplňHviezdu(),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnHviezdu
public Shape vyplnHviezdu(double polomer)
Alias pre vyplňHviezdu.
-
vyplnenáHviezda
public Shape vyplnenáHviezda(double polomer)
Alias pre vyplňHviezdu.
-
vyplnenaHviezda
public Shape vyplnenaHviezda(double polomer)
Alias pre vyplňHviezdu.
-
vyplnenúHviezdu
public Shape vyplnenúHviezdu(double polomer)
Alias pre vyplňHviezdu.
-
vyplnenuHviezdu
public Shape vyplnenuHviezdu(double polomer)
Alias pre vyplňHviezdu.
-
vyplnenejHviezdy
public Shape vyplnenejHviezdy(double polomer)
Alias pre vyplňHviezdu.
-
krúžok
public Shape krúžok()
Nakreslí na mieste robota kruh alebo kružnicu s polomerom veľkosti robota. Vyplnenie tvaru (kreslenie kruhu namiesto kružnice) závisí od nastavenia vlastnosti
vypĺňajTvary. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Poznámka: Pri hľadaní pomenovania tejto metódy vznikol terminologický problém. Slovo „krúžok“ bolo použité ako núdzové riešenie situácie, pretože slovenský jazyk striktne rozlišuje kruh ako vyplnený tvar a kružnicu ako nakreslenú čiaru ohraničujúcu tento vyplnený tvar.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
krúžok(double),elipsa(double),štvorec(),obdĺžnik(double),hviezda(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kružnica
public Shape kružnica()
Nakreslí na mieste robota kružnicu s polomerom veľkosti robota. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
kružnica(double),kruh(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(double),vyplňObdĺžnik(double),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kruh
public Shape kruh()
Nakreslí na mieste robota kruh s polomerom veľkosti robota. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Pozri tiež:
kruh(double),kružnica(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(double),vyplňObdĺžnik(double),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
elipsa
public Shape elipsa(double pomer)
Nakreslí alebo vyplní na mieste robota elipsu pootočenú v smere robota s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeru. Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Argumentpomerudáva pomer šírky k výške útvaru. Hodnota1.0znamená rovnakú šírku ako výšku (čiže hodnotu rovnú aktuálnej veľkosti robota). Čím väčšia hodnota od čísla1.0, tým širší útvar, čím nižšia hodnota (v rozsahu od1.0do0.0), tým užší útvar. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
pomer– pomer hlavnej a vedľajšej poloosi (šírky a výšky elipsy –2.0znamená dvojnásobnú šírku,0.5polovičnú a podobne)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
elipsa(double, double),kružnica(),kruh(),štvorec(),obdĺžnik(double),hviezda(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliElipsu
public Shape kresliElipsu(double pomer)
Nakreslí na mieste robota elipsu pootočenú v smere robota s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeru. Argument
pomerudáva pomer šírky k výške útvaru. Hodnota1.0znamená rovnakú šírku ako výšku (čiže hodnotu rovnú aktuálnej veľkosti robota). Čím väčšia hodnota od čísla1.0, tým širší útvar, čím nižšia hodnota (v rozsahu od1.0do0.0), tým užší útvar. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
pomer– pomer hlavnej a vedľajšej poloosi (šírky a výšky elipsy –2.0znamená dvojnásobnú šírku,0.5polovičnú a podobne)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
kresliElipsu(double, double),kružnica(),kruh(),vyplňElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(double),vyplňObdĺžnik(double),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplňElipsu
public Shape vyplňElipsu(double pomer)
Vyplní elipsu so stredom na mieste robota, pootočenú v smere robota, s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeru. Argument
pomerudáva pomer šírky k výške útvaru. Hodnota1.0znamená rovnakú šírku ako výšku (čiže hodnotu rovnú aktuálnej veľkosti robota). Čím väčšia hodnota od čísla1.0, tým širší útvar, čím nižšia hodnota (v rozsahu od1.0do0.0), tým užší útvar. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
pomer– pomer hlavnej a vedľajšej poloosi (šírky a výšky elipsy –2.0znamená dvojnásobnú šírku,0.5polovičnú a podobne)- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Pozri tiež:
vyplňElipsu(double, double),kružnica(),kruh(),elipsa(double),kresliElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(double),vyplňObdĺžnik(double),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnElipsu
public Shape vyplnElipsu(double pomer)
Alias pre vyplňElipsu.
-
vyplnenáElipsa
public Shape vyplnenáElipsa(double pomer)
Alias pre vyplňElipsu.
-
vyplnenaElipsa
public Shape vyplnenaElipsa(double pomer)
Alias pre vyplňElipsu.
-
vyplnenúElipsu
public Shape vyplnenúElipsu(double pomer)
Alias pre vyplňElipsu.
-
vyplnenuElipsu
public Shape vyplnenuElipsu(double pomer)
Alias pre vyplňElipsu.
-
vyplnenejElipsy
public Shape vyplnenejElipsy(double pomer)
Alias pre vyplňElipsu.
-
elipsa
public Shape elipsa()
Nakreslí alebo vyplní na mieste robota elipsu pootočenú v smere robota s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeru. Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Pomer šírky k výške útvaru je určený vlastnosťou robotapomer. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
elipsa(double, double),kružnica(),kruh(),štvorec(),obdĺžnik(),hviezda(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliElipsu
public Shape kresliElipsu()
Nakreslí na mieste robota elipsu pootočenú v smere robota s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeru. Pomer šírky k výške útvaru je určený vlastnosťou robota
pomer. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
kresliElipsu(double, double),kružnica(),kruh(),vyplňElipsu(),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(),vyplňObdĺžnik(),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplňElipsu
public Shape vyplňElipsu()
Vyplní elipsu so stredom na mieste robota, pootočenú v smere robota, s veľkosťou odvodenou od veľkosti robota podľa zadaného stranového pomeru. Pomer šírky k výške útvaru je určený vlastnosťou robota
pomer. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Pozri tiež:
vyplňElipsu(double, double),kružnica(),kruh(),elipsa(),kresliElipsu(),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(),vyplňObdĺžnik(),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnElipsu
public Shape vyplnElipsu()
Alias pre vyplňElipsu.
-
vyplnenáElipsa
public Shape vyplnenáElipsa()
Alias pre vyplňElipsu.
-
vyplnenaElipsa
public Shape vyplnenaElipsa()
Alias pre vyplňElipsu.
-
vyplnenúElipsu
public Shape vyplnenúElipsu()
Alias pre vyplňElipsu.
-
vyplnenuElipsu
public Shape vyplnenuElipsu()
Alias pre vyplňElipsu.
-
vyplnenejElipsy
public Shape vyplnenejElipsy()
Alias pre vyplňElipsu.
-
štvorec
public Shape štvorec()
Nakreslí alebo vyplní na mieste robota štvorec určený rozmerom vpísanej kružnice s polomerom veľkosti robota a obrátený v smere robota. Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
štvorec(double),kružnica(),kruh(),elipsa(double),obdĺžnik(double),hviezda(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliŠtvorec
public Shape kresliŠtvorec()
Nakreslí na mieste robota štvorec určený rozmerom vpísanej kružnice s polomerom veľkosti robota a obrátený v smere robota. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
kresliŠtvorec(double),kružnica(),kruh(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),vyplňŠtvorec(),kresliObdĺžnik(double),vyplňObdĺžnik(double),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliStvorec
public Shape kresliStvorec()
Alias pre kresliŠtvorec.
-
vyplňŠtvorec
public Shape vyplňŠtvorec()
Vyplní štvorec so stredom na mieste robota, obrátený v smere robota a určený polomerom vpísanej kružnice s polomerom veľkosti robota. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Pozri tiež:
vyplňŠtvorec(double),kružnica(),kruh(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),štvorec(),kresliŠtvorec(),kresliObdĺžnik(double),vyplňObdĺžnik(double),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnStvorec
public Shape vyplnStvorec()
Alias pre vyplňŠtvorec.
-
vyplnenýŠtvorec
public Shape vyplnenýŠtvorec()
Alias pre vyplňŠtvorec.
-
vyplnenyStvorec
public Shape vyplnenyStvorec()
Alias pre vyplňŠtvorec.
-
vyplnenéhoŠtvorca
public Shape vyplnenéhoŠtvorca()
Alias pre vyplňŠtvorec.
-
vyplnenehoStvorca
public Shape vyplnenehoStvorca()
Alias pre vyplňŠtvorec.
-
obdĺžnik
public Shape obdĺžnik(double pomer)
Nakreslí alebo vyplní na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota. Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Argumentpomerudáva pomer šírky k výške útvaru. Hodnota1.0znamená rovnakú šírku ako výšku (čiže hodnotu rovnú aktuálnej veľkosti robota). Čím väčšia hodnota od čísla1.0, tým širší útvar, čím nižšia hodnota (v rozsahu od1.0do0.0), tým užší útvar. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
pomer– pomer hlavnej a vedľajšej poloosi vpísanej elipsy (šírky a výšky obdĺžnika –2.0znamená dvojnásobnú šírku,0.5polovičnú a podobne)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
obdĺžnik(double, double),kružnica(),kruh(),elipsa(double),štvorec(),hviezda(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliObdĺžnik
public Shape kresliObdĺžnik(double pomer)
Nakreslí na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota. Argument
pomerudáva pomer šírky k výške útvaru. Hodnota1.0znamená rovnakú šírku ako výšku (čiže hodnotu rovnú aktuálnej veľkosti robota). Čím väčšia hodnota od čísla1.0, tým širší útvar, čím nižšia hodnota (v rozsahu od1.0do0.0), tým užší útvar. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
pomer– pomer hlavnej a vedľajšej poloosi vpísanej elipsy (šírky a výšky obdĺžnika –2.0znamená dvojnásobnú šírku,0.5polovičnú a podobne)- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
kresliObdĺžnik(double, double),kružnica(),kruh(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),vyplňObdĺžnik(double),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliObdlznik
public Shape kresliObdlznik(double pomer)
Alias pre kresliObdĺžnik.
-
vyplňObdĺžnik
public Shape vyplňObdĺžnik(double pomer)
Vyplní obdĺžnik so stredom na mieste robota, obrátený v smere robota a určený rozmermi vpísanej elipsy. Argument
pomerudáva pomer šírky k výške útvaru. Hodnota1.0znamená rovnakú šírku ako výšku (čiže hodnotu rovnú aktuálnej veľkosti robota). Čím väčšia hodnota od čísla1.0, tým širší útvar, čím nižšia hodnota (v rozsahu od1.0do0.0), tým užší útvar. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
pomer– pomer hlavnej a vedľajšej poloosi vpísanej elipsy (šírky a výšky obdĺžnika –2.0znamená dvojnásobnú šírku,0.5polovičnú a podobne)- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Pozri tiež:
vyplňObdĺžnik(double, double),kružnica(),kruh(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(double),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnObdlznik
public Shape vyplnObdlznik(double pomer)
Alias pre vyplňObdĺžnik.
-
vyplnenýObdĺžnik
public Shape vyplnenýObdĺžnik(double pomer)
Alias pre vyplňObdĺžnik.
-
vyplnenyObdlznik
public Shape vyplnenyObdlznik(double pomer)
Alias pre vyplňObdĺžnik.
-
vyplnenéhoObdĺžnika
public Shape vyplnenéhoObdĺžnika(double pomer)
Alias pre vyplňObdĺžnik.
-
vyplnenehoObdlznika
public Shape vyplnenehoObdlznika(double pomer)
Alias pre vyplňObdĺžnik.
-
obdĺžnik
public Shape obdĺžnik()
Nakreslí alebo vyplní na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota. Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Pomer šírky k výške útvaru je určený vlastnosťou robotapomer. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
obdĺžnik(double, double),kružnica(),kruh(),elipsa(),štvorec(),hviezda(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliObdĺžnik
public Shape kresliObdĺžnik()
Nakreslí na mieste robota obdĺžnik určený rozmerom vpísanej elipsy a obrátený v smere robota. Pomer šírky k výške útvaru je určený vlastnosťou robota
pomer. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
kresliObdĺžnik(double, double),kružnica(),kruh(),elipsa(),kresliElipsu(),vyplňElipsu(),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),vyplňObdĺžnik(),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliObdlznik
public Shape kresliObdlznik()
Alias pre kresliObdĺžnik.
-
vyplňObdĺžnik
public Shape vyplňObdĺžnik()
Vyplní obdĺžnik so stredom na mieste robota, obrátený v smere robota a určený rozmermi vpísanej elipsy. Pomer šírky k výške útvaru je určený vlastnosťou robota
pomer. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Pozri tiež:
vyplňObdĺžnik(double, double),kružnica(),kruh(),elipsa(),kresliElipsu(),vyplňElipsu(),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnObdlznik
public Shape vyplnObdlznik()
Alias pre vyplňObdĺžnik.
-
vyplnenýObdĺžnik
public Shape vyplnenýObdĺžnik()
Alias pre vyplňObdĺžnik.
-
vyplnenyObdlznik
public Shape vyplnenyObdlznik()
Alias pre vyplňObdĺžnik.
-
vyplnenéhoObdĺžnika
public Shape vyplnenéhoObdĺžnika()
Alias pre vyplňObdĺžnik.
-
vyplnenehoObdlznika
public Shape vyplnenehoObdlznika()
Alias pre vyplňObdĺžnik.
-
hviezda
public Shape hviezda()
Nakreslí alebo vyplní na mieste robota hviezdu určenú rozmerom opísanej kružnice s polomerom veľkosti robota a obrátenú v smere robota. Spôsob nakreslenia tvaru (vyplnenie alebo obkreslenie) závisí od nastavenia vlastnosti
vypĺňajTvary. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
hviezda(double),kružnica(),kruh(),elipsa(double),štvorec(),obdĺžnik(double),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
kresliHviezdu
public Shape kresliHviezdu()
Nakreslí na mieste robota hviezdu určenú rozmerom opísanej kružnice s polomerom veľkosti robota a obrátenú v smere robota. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci kreslený útvar - Pozri tiež:
kresliHviezdu(double),kružnica(),kruh(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(double),vyplňObdĺžnik(double),vyplňHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplňHviezdu
public Shape vyplňHviezdu()
Vyplní hviezdu so stredom na mieste robota, obrátenú v smere robota a určenú rozmerom opísanej kružnice s polomerom veľkosti robota. Poloha pera nemá na kreslenie tohto útvaru vplyv. Metóda funguje ako pečiatka. Útvar nie je nakreslený v prípade, že bol tento robot zamestnaný na účely tvorby oblasti alebo je zakázané kreslenie tvarov.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- objekt typu
Shapereprezentujúci vypĺňaný útvar - Pozri tiež:
vyplňHviezdu(double),kružnica(),kruh(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),kresliObdĺžnik(double),vyplňObdĺžnik(double),kresliHviezdu(),text(String),text(String, int),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
vyplnHviezdu
public Shape vyplnHviezdu()
Alias pre vyplňHviezdu.
-
vyplnenáHviezda
public Shape vyplnenáHviezda()
Alias pre vyplňHviezdu.
-
vyplnenaHviezda
public Shape vyplnenaHviezda()
Alias pre vyplňHviezdu.
-
vyplnenúHviezdu
public Shape vyplnenúHviezdu()
Alias pre vyplňHviezdu.
-
vyplnenuHviezdu
public Shape vyplnenuHviezdu()
Alias pre vyplňHviezdu.
-
vyplnenejHviezdy
public Shape vyplnenejHviezdy()
Alias pre vyplňHviezdu.
-
vajce
public Shape vajce(double polomer, String... nastavenia)
Nakreslí vajce. Táto metóda sa významne odlišuje od ostatných metód, ktoré slúžia na kreslenie tvarov. Nemá žiadne verzie. Nie sú k nej definované metódy slúžiace na overovanie prítomnosti bodov (alebo myši) v rámci tvaru. Predvolene negeneruje tvar na ďalšie použitie. Neberie do úvahy vypĺňanie tvarov. Všetko to súvisí s jedným faktom: Metóda len uzatvára nižšie uvedený algoritmus kreslenia vajíčka. Algoritmus pochádza z tohto zdroja.
Na lepšie pochopenie si uveďme najskôr schému kreslenia:

Ilustračná schéma k algoritmu kreslenia vajca.Algoritmus metódy vyzerá zhruba takto:
// Deklarácie bodov:BodS, A, B, C, D, E;// Zapamätanie si počiatočnej polohy a uhla (do zálohy, aby sme sa// po skončení kreslenia vedeli vrátiť do pôvodného stavu):S =poloha();doubleu =uhol();// Kreslenie v „try“ a vrátenie zálohy vo „finally“ (to je „trik“,// ktorý sa používa v takýchto prípadoch, lebo „finally“ sa vykoná// vždy, aj keby počas vykonávania bloku „try“ nastala nejaká chyba):try{// Body A, B, C vieme zistiť veľmi ľahko:skoč(polomer); C =poloha();poloha(S);preskočVpravo(polomer); B =poloha();poloha(S);preskočVľavo(polomer); A =poloha();Bod[]// Vypočítame priesečníky priamky AC a kružnice {A; 2r} – sú dva:P =Svet.priesečníkyPriamkyAKružnice(A, C, A,2* polomer);// Z nich jeden je bod E – je to ten, ktorý je bližšie k bodu C:if(Svet.vzdialenosť(C, P[0]) <Svet.vzdialenosť(C, P[P.length -1])) E = P[0];elseE = P[P.length -1];// Podobne nájdeme bod D:P =Svet.priesečníkyPriamkyAKružnice(B, C, B,2* polomer);if(Svet.vzdialenosť(C, P[0]) <Svet.vzdialenosť(C, P[P.length -1])) D = P[0];elseD = P[P.length -1];// A nakoniec nakreslíme celé vajce (zložené z oblúkov):choďNaPoOblúku(D.polohaX(), D.polohaY());choďNaPoOblúku(E.polohaX(), E.polohaY());choďNaPoOblúku(B.polohaX(), B.polohaY());choďNaPoOblúku(A.polohaX(), A.polohaY());// Poznámka: Pozri varovanie v opise metódy://choďNaPoOblúku(poloha)}finally{// Vrátenie zálohy:skočNa(S);uhol(u); }Metóda môže prijať nepovinný zoznam reťazcových parametrov (
nastavenia), ktoré umožňujú vykonať nasledujúce zmeny správania metódy:"zaznamenajCestu","cesta","cestu"– zapne zaznamenávanie cesty pre záverečnú štvoricu príkazovchoďNaPoOblúku(pozri kód vyššie). Tento príkaz zároveň prikáže dočasne zdvihnúť pero (počas vykonávania tejto metódy), aby sa vajce nenakreslilo. Tvar bude uložený v ceste. Po skončení vykonávania metódy je obnovená pôvodná poloha pera. (Ak bolo pero zdvihnuté, zostane zdvihnuté a po skončení vykonávania metódy sa nepoloží.) Toto nastavenie sa stane nedostupným v prípade, že bolo použité niektoré z nastavení"vráť","vyplň"alebo"kresli"(pozri nižšie)."nezaznamenajCestu","necesta","necestu"– vypne zaznamenávanie cesty zapnuté podľa predchádzajúceho nastavenia, ale nezruší zdvihnutie pera. Toto nastavenie sa stane nedostupným v prípade, že bolo použité niektoré z nastavení"vráť","vyplň"alebo"kresli"(pozri nižšie)."zdvihniPero","nepero"– dočasne zdvihne pero – počas vykonávania tejto metódy. Po skončení vykonávania metódy je obnovená pôvodná poloha pera."nezdvíhajPero","nezdvihniPero","pero"– eliminuje akciu dočasného zdvíhania pera. Toto má význam vykonať najmä po nastavení"cesta"(alebo jeho alternatívy), ktorý zároveň prikazuje dočasne zdvihnúť pero. Takže kombináciou nastavení:"cesta"a"pero"(v uvedenom poradí) sa dá docieliť súčasné zaznamenanie cesty aj nakreslenie vajca. Pozor, ak bolo pero zdvihnuté, toto nastavenie ho nepoloží. Toto nastavenie len zruší automatické dočasné zdvíhanie pera, ale ak chceme vajce nakresliť, treba mať pero položené už pred volaním tejto metódy.
Nasledujúce tri nastavenia zrušia efekt nastavení
"cesta"alebo"necesta"a spôsobia, že tieto dve nastavenia sa stanú nedostupnými pre toto volanie metódy."vráť","vráťCestu"– vykoná nastavenie"zdvihniPero", zálohuje aktuálny stav záznamu a/alebo uloženia cesty tohto robota, vytvorí z vajca novú cestu, obnoví predchádzajúci stav záznamu cesty a vráti cestu vytvorenú z vajca v návratovej hodnote tejto metódy."vyplň","vyplňCestu"– vykoná nastavenie"vráť", zavolá metódukresliZáznamCesty(false)a metóduvyplňTvar(cesta)s aktuálne vytvorenou cestou z vajca."kresli","kresliCestu"– vykoná nastavenie"vráť", zavolá metódukresliZáznamCesty(false)a metódukresliTvar(cesta)s aktuálne vytvorenou cestou z vajca.
Parametre nastavení sú vyhodnocované postupne, to znamená, že tie neskoršie uvedené môžu zrušiť alebo čiastočne zrušiť akcie tých skôr uvedených. Medzery, spojovníky a podčiarkovníky sú z parametrov pred ich vyhodnotením vymazané. Na veľkosti písmen nezáleží.
Mimochodom, vytvorenie schémy vyššie bolo vykonané nasledujúcim spôsobom (ktorý je zároveň dobrou ukážkou použitia SVG podpory):
importjava.awt.BasicStroke;importjava.awt.Shape;importknižnica.*;publicclassNákresKVajcuextendsGRobot{privatefinalstaticBasicStrokečiaraNákresu =newBasicStroke(0.65f,BasicStroke.CAP_ROUND,BasicStroke.JOIN_ROUND,1.0f,newfloat[]{5.0f,5.0f},0.0f);privateNákresKVajcu() {super(800,540);skry();písmo(newPísmo("Arial",Písmo.NORMÁLNE,40)); nákresKVajcu(130); }
// Prekrytia metód využitých pri kreslení:@OverridepublicShapekružnica(doubler) {Shapes;svgPodpora.pridaj(s =super.kružnica(r),this);returns; }@OverridepublicvoidchoďNa(Polohap) {super.choďNa(p);svgPodpora.pridajÚsečku(this); }@OverridepublicvoidchoďNaPoOblúku(Polohap) {začniCestu();super.choďNaPoOblúku(p);svgPodpora.pridaj(cesta(),this); }@OverridepublicShapekruh(doubler) {Shapes;svgPodpora.pridaj(s =super.kruh(r),this);returns; }@OverridepublicShapetext(Strings) {svgPodpora.pridajText(s,this);returnsuper.text(s); }
publicvoidnákresKVajcu(doublepolomer) {// Deklarácie a záloha (presne ako v príklade vyššie):BodS, A, B, C, D, E; S =poloha();doubleu =uhol();// Vodiace čiary a kružnice nákresu budú nakreslené šedou// čiarkovanou čiarou:farba(šedá);čiara(čiaraNákresu);// || Poznámka: Všetky kresliace metódy použité nižšie (čiže ||// || podľa poradia výskytu: kružnica, choďNa, choďNaPoOblúku, ||// || kruh aj text) sú vyššie prekryté tak, aby zároveň s tým ||// || čo kreslia ukladali prislúchajúce tvary do inštancie ||// || SVG podpory. ||// Kružnica patriaca k zadanému polomeru vajca// (so stredom S a priemerom |AB|):kružnica(polomer);try{// Výpočty bodov vajca (zhodné s kódom algoritmu; vyššie):skoč(polomer); C =poloha();poloha(S);preskočVpravo(polomer); B =poloha();poloha(S);preskočVľavo(polomer); A =poloha();Bod[] P =Svet.priesečníkyPriamkyAKružnice(A, C, A,2* polomer);if(Svet.vzdialenosť(C, P[0]) <Svet.vzdialenosť(C, P[P.length -1])) E = P[0];elseE = P[P.length -1]; P =Svet.priesečníkyPriamkyAKružnice(B, C, B,2* polomer);if(Svet.vzdialenosť(C, P[0]) <Svet.vzdialenosť(C, P[P.length -1])) D = P[0];elseD = P[P.length -1];
// Úsečky nákresu (jedným ťahom):skočNa(E);choďNa(A);kružnica(2* polomer);// (ľavá kružnica s polomerom |AB|)choďNa(B);kružnica(2* polomer);// (pravá kružnica s polomerom |AB|)choďNa(D);// Menšia kružnica so stredom v bode C:skočNa(C);kružnica(Svet.vzdialenosť(C, D));// Farebné zvýraznenie segmentov vajca:hrúbkaČiary(3.25);skočNa(A);farba(svetlooranžová);choďNaPoOblúku(D);farba(svetlomodrá);choďNaPoOblúku(E);farba(svetlooranžová);choďNaPoOblúku(B);farba(svetločervená);choďNaPoOblúku(A);// Popisy bodov a ich vyznačenie čiernymi bodkami:farba(čierna);skočNa(A);kruh(3);preskočVľavo(40);text("A");skočNa(B);kruh(3);preskočVpravo(40);text("B");skočNa(C);kruh(3);skoč(30);text("C");skočNa(D);kruh(3);preskoč(-40,10);text("D");skočNa(E);kruh(3);preskoč(40,10);text("E");skočNa(S);kruh(3);odskoč(30);text("S"); }finally{skočNa(S);uhol(u);// (vrátenie zálohy)// Uloženie do súboru:svgPodpora.zapíš("schema-vajca.svg",null,true); } }
publicstaticvoidmain(String[] args) {Svet.použiKonfiguráciu("NákresKVajcu.cfg");newNákresKVajcu(); } }
Ilustračná schéma k algoritmu kreslenia vajca.Poznámka: Výška vajca sa dá vypočítať ako
polomer * (4 –Math.sqrt(2)).Ak máte záujem o zobrazenie postupu výpočtu výšky vajca, tak kliknite sem.
- Parametre:
polomer– polomer určujúci veľkosť vajíčka; ide o polomer kružnice so stredom S – pozri schému vyššienastavenia– nepovinný zoznam nastavení (podrobnosti sú uvedené v rámci opisu; vyššie)- Návratová hodnota:
nullalebo tvar vytvorený po použití nastavení"vráť","vyplň"alebo"kresli"
-
nUholník
public Shape nUholník(double rozmer, int n, String... nastavenia)
Nakreslí pravidelný n-uholník. Metóda funguje podobne ako metóda
vajce. Bola postavená na jej princípoch, preto je dobré prezrieť si aj jej dokumentáciu. Algoritmus kreslenia pravidelného mnohouholníka využil tento zdroj na obojsmerný prepočet medzi polomerom – vzdialenosťou od jeho stredu k ľubovoľnému vrcholu a dĺžkou stray mnohouholníka. Význam parametrarozmersa dá ovplyvniť nastaveniami"rozmerJePolomer"(predvolené) a"rozmerJeDĺžka"(pozri nižšie).

Ukážka nakreslenia viacerých n-uholníkov s rovnakým polomerom.
Ukážka nakreslenia viacerých n-uholníkov s rovnakou dĺžkou strany.
Algoritmus metódy vo verzii, kedy rozmer znamená dĺžku strany vyzerá zhruba takto:
publicvoidnUholník(doubledĺžka,intn) {Svet.nekresli();doubleu =uhol();Polohap =poloha();try{doublepootočenie =360.0/ n;doublepolomer = dĺžka / (2.0*Math.sin(Math.toRadians(pootočenie /2.0)));vpravo(180);odskoč(polomer);vľavo((180.0- pootočenie) /2.0);for(inti =0; i < n; ++i) {dopredu(dĺžka);vpravo(pootočenie); } }finally{uhol(u);poloha(p);Svet.kresli(); } }Metóda môže prijať nepovinný zoznam reťazcových parametrov (
nastavenia), ktoré umožňujú vykonať nasledujúce zmeny správania metódy:"zaznamenajCestu","cesta","cestu"– zapne zaznamenávanie cesty pre záverečnú dvojicu príkazovdopreduavpravouzavretú v cyklefor(pozri kód vyššie). Tento príkaz zároveň prikáže dočasne zdvihnúť pero (počas vykonávania tejto metódy), aby sa mnohouholník nenakreslil. Tvar bude uložený v ceste. Po skončení vykonávania metódy je obnovená pôvodná poloha pera. (Ak bolo pero zdvihnuté, zostane zdvihnuté a po skončení vykonávania metódy sa nepoloží.) Toto nastavenie sa stane nedostupným v prípade, že bolo použité niektoré z nastavení"vráť","vyplň"alebo"kresli"(pozri nižšie)."nezaznamenajCestu","necesta","necestu"– vypne zaznamenávanie cesty zapnuté podľa predchádzajúceho nastavenia, ale nezruší zdvihnutie pera. Toto nastavenie sa stane nedostupným v prípade, že bolo použité niektoré z nastavení"vráť","vyplň"alebo"kresli"(pozri nižšie)."zdvihniPero","nepero"– dočasne zdvihne pero – počas vykonávania tejto metódy. Po skončení vykonávania metódy je obnovená pôvodná poloha pera."nezdvíhajPero","nezdvihniPero","pero"– eliminuje akciu dočasného zdvíhania pera. Toto má význam vykonať najmä po nastavení"cesta"(alebo jeho alternatívy), ktorý zároveň prikazuje dočasne zdvihnúť pero. Takže kombináciou nastavení:"cesta"a"pero"(v uvedenom poradí) sa dá docieliť súčasné zaznamenanie cesty aj nakreslenie mnohouholníka. Pozor, ak bolo pero zdvihnuté, toto nastavenie ho nepoloží. Toto nastavenie len zruší automatické dočasné zdvíhanie pera, ale ak chceme mnohouholník nakresliť, treba mať pero položené už pred volaním tejto metódy."rozmerJePolomer"– prepne metódu do režimu (ak už v ňom nie je), kedy parameterrozmerbude mať význam polomeru mnohouholníka – vzdialenosti ľubovoľného vrchola od stredu. * Toto je predvolený režim."rozmerJeDĺžka"– prepne metódu do režimu, kedy parameterrozmerbude mať význam dĺžky strany mnohouholníka.
Nasledujúce tri nastavenia zrušia efekt nastavení
"cesta"alebo"necesta"a spôsobia, že tieto dve nastavenia sa stanú nedostupnými pre toto volanie metódy."vráť","vráťCestu"– vykoná nastavenie"zdvihniPero", zálohuje aktuálny stav záznamu a/alebo uloženia cesty tohto robota, vytvorí z n-uholníka novú cestu, obnoví predchádzajúci stav záznamu cesty a vráti cestu vytvorenú z n-uholníka v návratovej hodnote tejto metódy."vyplň","vyplňCestu"– vykoná nastavenie"vráť", zavolá metódukresliZáznamCesty(false)a metóduvyplňTvar(cesta)s aktuálne vytvorenou cestou z n-uholníka."kresli","kresliCestu"– vykoná nastavenie"vráť", zavolá metódukresliZáznamCesty(false)a metódukresliTvar(cesta)s aktuálne vytvorenou cestou z n-uholníka.
Parametre nastavení sú vyhodnocované postupne, to znamená, že tie neskoršie uvedené môžu zrušiť alebo čiastočne zrušiť akcie tých skôr uvedených. Medzery, spojovníky a podčiarkovníky sú z parametrov pred ich vyhodnotením vymazané. Na veľkosti písmen nezáleží.
- Parametre:
rozmer– buď polomer (predvolené), alebo dĺžka strany n-uholníka (pozri nastavenia vyššie)n– počet uhlov n-uholníka; ak je n menšie ako 2, tak volanie metódy v podstate nemá zmysel (nenakreslí nič)nastavenia– nepovinný zoznam nastavení (podrobnosti sú uvedené v rámci opisu; vyššie)- Návratová hodnota:
nullalebo tvar vytvorený po použití nastavení"vráť","vyplň"alebo"kresli"
-
lupene
public Shape lupene(double polomer, int n, double odklon, String... nastavenia)
Nakreslí n lupeňov umiestnených na pomyselnej kružnici so zadaným polomerom. Metóda funguje podobne ako metódy
vajceanUholník. Využíva podobné nastavenia, ktoré vedú k podobnému správaniu, preto je dobré prezrieť si aj ich dokumentáciu.Podobne ako uvedené metódy, aj táto metóda najskôr vykoná niekoľko prípravných príkazov a potom príkazy, ktoré skutočne kreslia lupene. V tomto prípade slúžia prípravné príkazy na zistenie kľúčových bodov kreslenia lupeňov.
Metóda môže prijať nepovinný zoznam reťazcových parametrov (
nastavenia), ktoré umožňujú vykonať nasledujúce zmeny správania metódy:"zaznamenajCestu","cesta","cestu"– zapne zaznamenávanie cesty pre záverečnú sériu príkazov kresliacich lupene. Tento príkaz zároveň prikáže dočasne zdvihnúť pero (počas vykonávania tejto metódy), aby sa lupene nenakreslili. Tvar bude uložený v ceste. Po skončení vykonávania metódy je obnovená pôvodná poloha pera. (Ak bolo pero zdvihnuté, zostane zdvihnuté a po skončení vykonávania metódy sa nepoloží.) Toto nastavenie sa stane nedostupným v prípade, že bolo použité niektoré z nastavení"vráť","vyplň"alebo"kresli"(pozri nižšie)."nezaznamenajCestu","necesta","necestu"– vypne zaznamenávanie cesty zapnuté podľa predchádzajúceho nastavenia, ale nezruší zdvihnutie pera. Toto nastavenie sa stane nedostupným v prípade, že bolo použité niektoré z nastavení"vráť","vyplň"alebo"kresli"(pozri nižšie)."zdvihniPero","nepero"– dočasne zdvihne pero – počas vykonávania tejto metódy. Po skončení vykonávania metódy je obnovená pôvodná poloha pera."nezdvíhajPero","nezdvihniPero","pero"– eliminuje akciu dočasného zdvíhania pera. Toto má význam vykonať najmä po nastavení"cesta"(alebo jeho alternatívy), ktorý zároveň prikazuje dočasne zdvihnúť pero. Takže kombináciou nastavení:"cesta"a"pero"(v uvedenom poradí) sa dá docieliť súčasné zaznamenanie cesty aj nakreslenie lupeňov. Pozor, ak bolo pero zdvihnuté, toto nastavenie ho nepoloží. Toto nastavenie len zruší automatické dočasné zdvíhanie pera, ale ak chceme lupene nakresliť, treba mať pero položené už pred volaním tejto metódy.
Nasledujúce tri nastavenia zrušia efekt nastavení
"cesta"alebo"necesta"a spôsobia, že tieto dve nastavenia sa stanú nedostupnými pre toto volanie metódy."vráť","vráťCestu"– vykoná nastavenie"zdvihniPero", zálohuje aktuálny stav záznamu a/alebo uloženia cesty tohto robota, vytvorí z tvaru lupeňov novú cestu, obnoví predchádzajúci stav záznamu cesty a vráti cestu vytvorenú z lupeňov v návratovej hodnote tejto metódy."vyplň","vyplňCestu"– vykoná nastavenie"vráť", zavolá metódukresliZáznamCesty(false)a metóduvyplňTvar(cesta)s aktuálne vytvorenou cestou z lupeňov."kresli","kresliCestu"– vykoná nastavenie"vráť", zavolá metódukresliZáznamCesty(false)a metódukresliTvar(cesta)s aktuálne vytvorenou cestou z lupeňov.
Parametre nastavení sú vyhodnocované postupne, to znamená, že tie neskoršie uvedené môžu zrušiť alebo čiastočne zrušiť akcie tých skôr uvedených. Medzery, spojovníky a podčiarkovníky sú z parametrov pred ich vyhodnotením vymazané. Na veľkosti písmen nezáleží.
- Parametre:
polomer– polomer pomyselnej kružnice, od ktorej sa odvíja kreslenie lupeňovn– počet lupeňovodklon– odklon pri kreslení oblúkov lupeňov; ak je nulový, tak sa oblúky začínajú kresliť kolmo na pomyselnú východiskovú kružnicu lupeňov; rôznymi odchýlkami sa dajú dosiahnuť zaujímavé tvarynastavenia– nepovinný zoznam nastavení (podrobnosti sú uvedené v rámci opisu; vyššie)- Návratová hodnota:
nullalebo tvar vytvorený po použití nastavení"vráť","vyplň"alebo"kresli"
-
nHviezda
public Shape nHviezda(double polomer, int n, double parameter, String... nastavenia)
Nakreslí n-cípu hviezdu, ktorej cípy ležia na kružnici so zadaným polomerom. Metóda funguje podobne ako metódy
vajce,nUholníkalebolupene. Využíva podobné nastavenia, ktoré vedú k podobnému správaniu, preto môže byť užitočné prezrieť si aj ich dokumentáciu.Podobne ako uvedené metódy, aj táto metóda najskôr vykoná niekoľko prípravných príkazov a potom príkazy, ktoré skutočne kreslia hviezdu. V tomto prípade slúžia prípravné príkazy na zistenie kľúčových bodov kreslenia hviezdy.
Metóda môže prijať nepovinný zoznam reťazcových parametrov (
nastavenia), ktoré umožňujú vykonať nasledujúce zmeny správania metódy:"zaznamenajCestu","cesta","cestu"– zapne zaznamenávanie cesty pre záverečnú sériu príkazov kresliacich hviezdu. Tento príkaz zároveň prikáže dočasne zdvihnúť pero (počas vykonávania tejto metódy), aby sa hviezda nenakreslila. Tvar bude uložený v ceste. Po skončení vykonávania metódy je obnovená pôvodná poloha pera. (Ak bolo pero zdvihnuté, zostane zdvihnuté a po skončení vykonávania metódy sa nepoloží.) Toto nastavenie sa stane nedostupným v prípade, že bolo použité niektoré z nastavení"vráť","vyplň"alebo"kresli"(pozri nižšie)."nezaznamenajCestu","necesta","necestu"– vypne zaznamenávanie cesty zapnuté podľa predchádzajúceho nastavenia, ale nezruší zdvihnutie pera. Toto nastavenie sa stane nedostupným v prípade, že bolo použité niektoré z nastavení"vráť","vyplň"alebo"kresli"(pozri nižšie)."zdvihniPero","nepero"– dočasne zdvihne pero – počas vykonávania tejto metódy. Po skončení vykonávania metódy je obnovená pôvodná poloha pera."nezdvíhajPero","nezdvihniPero","pero"– eliminuje akciu dočasného zdvíhania pera. Toto má význam vykonať najmä po nastavení"cesta"(alebo jeho alternatívy), ktorý zároveň prikazuje dočasne zdvihnúť pero. Takže kombináciou nastavení:"cesta"a"pero"(v uvedenom poradí) sa dá docieliť súčasné zaznamenanie cesty aj nakreslenie hviezdy. Pozor, ak bolo pero zdvihnuté, toto nastavenie ho nepoloží. Toto nastavenie len zruší automatické dočasné zdvíhanie pera, ale ak chceme hviezdu nakresliť, treba mať pero položené už pred volaním tejto metódy.
Nasledujúce tri nastavenia menia význam parametra ovplyvňujúceho tvar hviezdy. Predvolený je
"typ0". Všetky tri nastavenia prepočítavajú parameter na polomer ďalšej kružnice, na ktorej majú ležať alternujúce vrcholy polygónu tvoriaceho hviezdu. Líši sa len spôsob prepočtu."typ0","predvolenýTyp","predvolenyTyp"– najskôr je vypočítaný hraničný pomer s využitím metódypomerHviezdy(p, q); kde p je počet cípov hviezdy (n) a q je v tomto prípade 2. Táto metóda vypočíta takú hodnotu pomeru polomerov (polomerov kružníc, na ktorých budú striedavo ležať body lomenej čiary tvoriacej hviezdu), ktorá vo výsledku zorietuje hrany hviezdy tak, aby boli zarovnané do priamok prechádzajúcich vrcholmi a alternujúcimi vrcholmi polygónu hviezdy. (Pozri poznámku nižšie.) Vypočítaný pomer bude v prípade zadania nulovej hodnoty parametra použitý priamo na výpočet polomeru alternujúcej kružnice, inak bude pomer najskôr prepočítavaný na jeden z dvoc h nasledujúcich rozsahov: Pri kladnom parametri sa bude použitá lineárna interpolácia prepočítavajúca rozsah hodnôt parametra t interpolácie (0; 1⟩ na interval ležiaci medzi hraničným pomerom a hodnotou 1 (prípadne väčšou). Pri zápornom parametri sa bude interpolovať opačným smerom – od hraničného pomeru smerom nule. Výsledná hodnota potom poslúži na výpočet polomeru kružnice, na ktorej majú ležať alternujúce vrcholy hviezdy („alternujúce“ sú pri pomere < 1 „vnútorné“).Poznámka: Na výpočet pomeru polomerov je použitá metóda
Svet.pomerHviezdy(p, q), kde p = n (počet cípov hviezdy) a q = 2. Keďže však táto metóda vracia pomer rovný 1 pre p < 4 a efektívne rovný 0 pre p = 4 je pre n < 5 použité p = 5."typ1","pomer"–parameterbude chápaný ako pomer polomeru ďalšej kružnice, na ktorej budú ležať alternujúce vrcholy polygónu tvoriaceho hviezdu. Čiže napríklad hodnota0.5znamená, že polomer ďalšej kružnice bude oproti originálnemu polomeru polovičný."typ2","polomer"–parameterbude chápaný ako polomer ďalšej kružnice, na ktorej budú ležať alternujúce vrcholy polygónu tvoriaceho hviezdu."typ3"– principiálne rovnaké ako"typ0", ale hranica je vypočítaná podľa nasledujúceho vzorca: √(n – 2√n) × sin(90° / n) / sin(180° / n); kde n je počet cípov hviezdy.
Nasledujúce tri nastavenia zrušia efekt nastavení
"cesta"alebo"necesta"a spôsobia, že tieto dve nastavenia sa stanú nedostupnými pre toto volanie metódy."vráť","vráťCestu"– vykoná nastavenie"zdvihniPero", zálohuje aktuálny stav záznamu a/alebo uloženia cesty tohto robota, vytvorí z tvaru hviezdy novú cestu, obnoví predchádzajúci stav záznamu cesty a vráti cestu vytvorenú z hviezdy v návratovej hodnote tejto metódy."vyplň","vyplňCestu"– vykoná nastavenie"vráť", zavolá metódukresliZáznamCesty(false)a metóduvyplňTvar(cesta)s aktuálne vytvorenou cestou z hviezdy."kresli","kresliCestu"– vykoná nastavenie"vráť", zavolá metódukresliZáznamCesty(false)a metódukresliTvar(cesta)s aktuálne vytvorenou cestou z hviezdy.
Parametre nastavení sú vyhodnocované postupne, to znamená, že tie neskoršie uvedené môžu zrušiť alebo čiastočne zrušiť akcie tých skôr uvedených. Medzery, spojovníky a podčiarkovníky sú z parametrov pred ich vyhodnotením vymazané. Na veľkosti písmen nezáleží.
- Parametre:
polomer– polomer kružnice, na ktorej majú ležať cípy hviezdyn– počet cípov hviezdyparameter– parameter ovplyvňujúci tvar cípov hviezdy; jeho význam sa mení podľa nastavení (pozri opis)nastavenia– nepovinný zoznam nastavení (podrobnosti sú uvedené v rámci opisu; vyššie)- Návratová hodnota:
nullalebo tvar vytvorený po použití nastavení"vráť","vyplň"alebo"kresli"
-
trojzubec
public Shape trojzubec()
Táto metóda buď nakreslí, alebo vráti tvar trojzubca, ktorý je predvoleným tvarom grafického robota. Metóda má zvláštne postavenie. Má jednu ďalšiu verziu prijímajúcu jeden logický parameter –
trojzubec(starý). Obidve verzie metódy vždy nanovo prepočítajú súradnice polygónu trojzubca podľa aktuálnej polohy, orientácie a veľkosti robota. Verzia prijímajúca logický parameter dovoľuje prepočítať tvar aj podľa starej koncepcie (pozri obrázok v jej opise), naproti tomu táto verzia metódy prepočíta vždy len novú verziu tvaru trojzubca. Inak fungujú rovnako.Ak je zapnuté kreslenie tvarov robotom, tak sa polygón priamo nakreslí alebo vyplní podľa aktuálneho nastavenia vypĺňania predvoleného tvaru, ktoré je ovplyvňované aj nastavením vykonávaným metódou
vypĺňajTvary. Tvar je kreslený alebo vyplnený s použitím aktuálnej farby a hrúbky (prípadne aj typu) čiary robota. V tomto prípade má metóda návratovú hodnotunull.Ak je kreslenie tvarov vypnuté, tak metóda z polygónu vyrobí tvar Javy a vráti ho v návratovej hodnote.
Táto metóda neaktualizuje pôsobisko. Slúži len na nakreslenie, vyplnenie alebo vrátenie tvaru trojzubca, ktorý slúži ako predvolený tvar robota.
(Pozri aj zmeny tvaru robota zachytené na obrázku v opise metódy
trojzubec(starý).)Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
- aktuálny tvar robota (v zmysle
aktuálnych parametrov robota – polohy, smeru, veľkosti…;
iba novú verziu – pozri aj obrázok v opise metódy
trojzubec(starý)) alebonull(podrobnosti sú v opise vyššie)
-
trojzubec
public Shape trojzubec(boolean starý)
Táto metóda buď nakreslí, alebo vráti starý alebo nový tvar trojzubca, ktorý tvorí predvolený tvar grafického robota. Spôsob činnosti je rovnaký ako pri metóde
trojzubec(), detaily nájdete tam. Jediný rozdiel je, že táto verzia metódy dovoľuje nakresliť alebo vrátiť aj starú verziu tvaru – umožňuje to hodnota logického parametrastarý.Rozdiel medzi starým a novým tvarom je zobrazený na obrázku nižšie. Na ilustráciu sú na obrázku zároveň nakreslené kružnice odrážajúce skutočnú veľkosť robota. Plocha kruhu ohraničeného kružnicou bola a je zároveň predvolenou kolíznou „oblasťou“ (resp. plochou) robota.
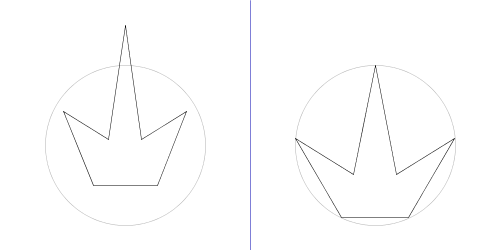
Starý predvolený tvar robota (pred verziou 1.75 – vľavo) a nový predvolený tvar robota (vpravo)
(šedé kružnice sú len ilustračné).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
starý– ak je hodnota parametera rovnátrue, tak táto metóda pracuje so starým tvarom robota (pozri obrázok vyššie), inak pracuje rovnako ako metódatrojzubec()- Návratová hodnota:
- aktuálny (v zmysle aktuálnych parametrov robota –
polohy, smeru, veľkosti…) starý alebo nový
tvar robota (pozri obrázok vyššie)
alebo
null(podrobnosti sú v opise metódytrojzubec())
-
kresliTvar
public Shape kresliTvar(Shape tvar)
Nakreslí čiaru podľa zadaného tvaru (hrúbkou a farbou čiary nastavenou pre tento robot).
Táto metóda berie do úvahy príznak kreslenia tvarov. Treba podotknúť, že ak je kreslenie tvarov robotom vypnuté, tak volanie tejto metódy nemá žiadny praktický význam, pretože len vráti rovnaký tvar, ktorý jej bol zadaný ako parameter (
tvar).Poznámka: Táto metóda bola pridaná spolu s triedou
SVGPodpora, aby boli ňou rozpoznané tvary jednoduchšie nakresliteľné.Poznámka: Názov tejto metódy koliduje s názvom metódy
kresliTvar()určenej na prekrytie a kreslenie vlastného tvaru robota. Okrem toho je definovaná metódakresliTvary(), ktorá slúži na opätovné povolenie kreslenia tvarov a písania textov robotom po ich vypnutí metódounekresliTvary().- Parametre:
tvar– objekt typuShape- Návratová hodnota:
- vráti rovnaký tvar ako bol zadaný v parametri
tvar(na ďalšie použitie)
-
vyplňTvar
public Shape vyplňTvar(Shape tvar)
Vyplní plochu zadaného tvaru farbou nastavenou pre tento robot.
Metóda berie do úvahy príznak kreslenia tvarov. Treba podotknúť, že ak je kreslenie tvarov robotom vypnuté, tak volanie tejto metódy nemá žiadny praktický význam, pretože len vráti rovnaký tvar, ktorý jej bol zadaný ako parameter (
tvar).Poznámka: Táto metóda bola pridaná spolu s triedou
SVGPodpora, aby boli ňou rozpoznané tvary jednoduchšie vyplniteľné.- Parametre:
tvar– objekt typuShape- Návratová hodnota:
- vráti rovnaký tvar ako bol zadaný v parametri
tvar(na ďalšie použitie)
-
vyplňTvar
public Shape vyplňTvar(Shape tvar, String súbor)
Vyplní plochu zadaného tvaru zadanou textúrou. Textúra je zadaná ako názov súboru s obrázkom, ktorý bude použitý na dlaždicové vyplnenie plochy tvaru.
Obrázok prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)Metóda berie do úvahy príznak kreslenia tvarov. Treba podotknúť, že ak je kreslenie tvarov robotom vypnuté, tak volanie tejto metódy nemá žiadny praktický význam, pretože len vráti rovnaký tvar, ktorý jej bol zadaný ako parameter (
tvar).Poznámka: Táto metóda bola pridaná spolu s triedou
SVGPodpora, aby boli ňou rozpoznané tvary jednoduchšie vyplniteľné.Poznámka: Parametre textúry sa dajú ovplyvňovať špeciálnymi príkazmi. Súvisí s nimi i predvolené správanie príkazov vypĺňania. Predvolený bod začiatku vypĺňania dlaždicami sa nachádza v strede plátna alebo vypĺňaného obrázka. Pozrite si aj opis metódy
posunutieVýplne, kde nájdete príklad použitia a odkazy na metódy upravujúce ďalšie parametre obrázkových výplní.- Parametre:
tvar– objekt typuShapesúbor– názov súboru s obrázkom textúry- Návratová hodnota:
- vráti rovnaký tvar ako bol zadaný v parametri
tvar(na ďalšie použitie) - Výnimky:
GRobotException– ak súbor s obrázkom nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(),Svet.priečinokObrázkov(String)
-
vyplňTvar
public Shape vyplňTvar(Shape tvar, Image výplň)
Vyplní plochu zadaného tvaru zadanou textúrou. Textúra bude použitá na dlaždicové vyplnenie plochy tvaru. Je zadaná ako objekt typu
Image, za ktorý môže byť dosadený aj objekt typuObrázok.Metóda berie do úvahy príznak kreslenia tvarov. Treba podotknúť, že ak je kreslenie tvarov robotom vypnuté, tak volanie tejto metódy nemá žiadny praktický význam, pretože len vráti rovnaký tvar, ktorý jej bol zadaný ako parameter (
tvar).Poznámka: Táto metóda bola pridaná spolu s triedou
SVGPodpora, aby boli ňou rozpoznané tvary jednoduchšie vyplniteľné.Poznámka: Parametre textúry sa dajú ovplyvňovať špeciálnymi príkazmi. Súvisí s nimi i predvolené správanie príkazov vypĺňania. Predvolený bod začiatku vypĺňania dlaždicami sa nachádza v strede plátna alebo vypĺňaného obrázka. Pozrite si aj opis metódy
posunutieVýplne, kde nájdete príklad použitia a odkazy na metódy upravujúce ďalšie parametre obrázkových výplní.- Parametre:
tvar– objekt typuShapevýplň– obrázok textúry- Návratová hodnota:
- vráti rovnaký tvar ako bol zadaný v parametri
tvar(na ďalšie použitie)
-
kresliTvar
public Shape kresliTvar(Shape tvar, boolean upravRobotom)
Nakreslí čiaru podľa zadaného tvaru (hrúbkou a farbou čiary nastavenou pre tento robot). Ak je hodnota parametra
upravRobotomrovnátrue, tak bude tvar pootočený podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite pootočí tvar) a posunutý o súradnice robota na plátne (východisko posunu je umiestnené do bodu [0, 0] – do stredu plátna; ak sa robot nachádza v strede plátna, tak sa poloha tvaru nezmení).Metóda berie do úvahy aj aktuálnu mierku robota a tiež príznak kreslenia tvarov.
Poznámka: Táto metóda bola pridaná spolu s triedou
SVGPodpora, aby boli ňou rozpoznané tvary jednoduchšie nakresliteľné.Poznámka: Názov tejto metódy koliduje s názvom metódy
kresliTvar()určenej na prekrytie a kreslenie vlastného tvaru robota. Okrem toho je definovaná metódakresliTvary(), ktorá slúži na opätovné povolenie kreslenia tvarov a písania textov robotom po ich vypnutí metódounekresliTvary().- Parametre:
tvar– objekt typuShapeupravRobotom– ak je hodnota tohto parametra rovnátrue, tak zadaný tvar bude upravený podľa polohy a orientácie robota, inak tvar nebude ovplyvňovaný- Návratová hodnota:
- vráti buď rovnaký tvar ako bol zadaný v parametri,
tvar, alebo tvar transformovaný podľa polohy a orientácie robota (na ďalšie použitie)
-
vyplňTvar
public Shape vyplňTvar(Shape tvar, boolean upravRobotom)
Vyplní plochu zadaného tvaru farbou nastavenou pre tento robot. Ak je hodnota parametra
upravRobotomrovnátrue, tak bude vypĺňaný tvar pootočený podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite pootočí tvar) a posunutý o súradnice robota na plátne (východisko posunu je umiestnené do bodu [0, 0] – do stredu plátna; ak sa robot nachádza v strede plátna, tak sa poloha tvaru nezmení).Metóda berie do úvahy aj aktuálnu mierku robota a tiež príznak kreslenia tvarov.
Poznámka: Táto metóda bola pridaná spolu s triedou
SVGPodpora, aby boli ňou rozpoznané tvary jednoduchšie vyplniteľné.- Parametre:
tvar– objekt typuShapeupravRobotom– ak je hodnota tohto parametra rovnátrue, tak zadaný tvar bude upravený podľa polohy a orientácie robota, inak tvar nebude ovplyvňovaný- Návratová hodnota:
- vráti buď rovnaký tvar ako bol zadaný v parametri,
tvar, alebo tvar transformovaný podľa polohy a orientácie robota (na ďalšie použitie)
-
vyplňTvar
public Shape vyplňTvar(Shape tvar, String súbor, boolean upravRobotom)
Vyplní plochu zadaného tvaru zadanou textúrou. Ak je hodnota parametra
upravRobotomrovnátrue, tak zadaný tvar bude pootočený podľa smeru[1] robota a posunutý o súradnice[2] robota na plátne. Pootočenie a poloha textúry nie sú nijako ovplyvňované polohou a smerom robota. Textúra je zadaná ako názov súboru s obrázkom, ktorý bude použitý na dlaždicové vyplnenie plochy tvaru.[1] – za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite pootočí tvar.
[2] – východisko posunu je umiestnené do bodu [0, 0] – do stredu plátna; ak sa robot nachádza v strede plátna, tak sa poloha tvaru nezmení.Metóda berie do úvahy aj aktuálnu mierku robota a tiež príznak kreslenia tvarov.
Obrázok prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)Poznámka: Táto metóda bola pridaná spolu s triedou
SVGPodpora, aby boli ňou rozpoznané tvary jednoduchšie vyplniteľné.Poznámka: Parametre textúry sa dajú ovplyvňovať špeciálnymi príkazmi. Súvisí s nimi i predvolené správanie príkazov vypĺňania. Predvolený bod začiatku vypĺňania dlaždicami sa nachádza v strede plátna alebo vypĺňaného obrázka. Pozrite si aj opis metódy
posunutieVýplne, kde nájdete príklad použitia a odkazy na metódy upravujúce ďalšie parametre obrázkových výplní.- Parametre:
tvar– objekt typuShapesúbor– názov súboru s obrázkom textúryupravRobotom– ak je hodnota tohto parametra rovnátrue, tak zadaný tvar bude upravený podľa polohy a orientácie robota, inak tvar nebude ovplyvňovaný- Návratová hodnota:
- vráti buď rovnaký tvar ako bol zadaný v parametri,
tvar, alebo tvar transformovaný podľa polohy a orientácie robota (na ďalšie použitie) - Výnimky:
GRobotException– ak súbor s obrázkom nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(),Svet.priečinokObrázkov(String)
-
vyplnTvar
public Shape vyplnTvar(Shape tvar, String súbor, boolean upravRobotom)
Alias pre vyplňTvar.
-
vyplňTvar
public Shape vyplňTvar(Shape tvar, Image výplň, boolean upravRobotom)
Vyplní plochu zadaného tvaru zadanou textúrou. Ak je hodnota parametra
upravRobotomrovnátrue, tak zadaný tvar bude pootočený podľa smeru[1] robota a posunutý o súradnice[2] robota na plátne. Pootočenie a poloha textúry nie sú nijako ovplyvňované polohou a smerom robota. Textúra bude použitá na dlaždicové vyplnenie plochy tvaru. Je zadaná ako objekt typuImage, za ktorý môže byť dosadený aj objekt typuObrázok.[1] – za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite pootočí tvar.
[2] – východisko posunu je umiestnené do bodu [0, 0] – do stredu plátna; ak sa robot nachádza v strede plátna, tak sa poloha tvaru nezmení.Metóda berie do úvahy aj aktuálnu mierku robota a tiež príznak kreslenia tvarov.
Poznámka: Táto metóda bola pridaná spolu s triedou
SVGPodpora, aby boli ňou rozpoznané tvary jednoduchšie vyplniteľné.Poznámka: Parametre textúry sa dajú ovplyvňovať špeciálnymi príkazmi. Súvisí s nimi i predvolené správanie príkazov vypĺňania. Predvolený bod začiatku vypĺňania dlaždicami sa nachádza v strede plátna alebo vypĺňaného obrázka. Pozrite si aj opis metódy
posunutieVýplne, kde nájdete príklad použitia a odkazy na metódy upravujúce ďalšie parametre obrázkových výplní.- Parametre:
tvar– objekt typuShapevýplň– obrázok textúryupravRobotom– ak je hodnota tohto parametra rovnátrue, tak zadaný tvar bude upravený podľa polohy a orientácie robota, inak tvar nebude ovplyvňovaný- Návratová hodnota:
- vráti buď rovnaký tvar ako bol zadaný v parametri,
tvar, alebo tvar transformovaný podľa polohy a orientácie robota (na ďalšie použitie)
-
vyplnTvar
public Shape vyplnTvar(Shape tvar, Image výplň, boolean upravRobotom)
Alias pre vyplňTvar.
-
myšVKruhu
public boolean myšVKruhu(double polomer)
Zistí, či sa aktuálne súradnice myši nachádzajú v kruhu so stredom na aktuálnej pozícii robota a zadaným polomerom.
- Parametre:
polomer– polomer vyšetrovaného kruhu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVCeste(),myšVElipse(double, double),myšVPôsobisku(),myšVoŠtvorci(double),myšVObdĺžniku(double, double),myšVHviezde(double),myšVOblasti(Area),myšVKruhu()
-
mysVKruhu
public boolean mysVKruhu(double polomer)
Alias pre myšVKruhu.
-
myšVElipse
public boolean myšVElipse(double a, double b)Zistí, či sa aktuálne súradnice myši nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi zadaných poloosí.
- Parametre:
a– veľkosť hlavnej poloosi (na šírku elipsy)b– veľkosť vedľajšej poloosi (na výšku elipsy)- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVCeste(),myšVKruhu(double),myšVPôsobisku(),myšVoŠtvorci(double),myšVObdĺžniku(double, double),myšVHviezde(double),myšVOblasti(Area),myšVKruhu()
-
mysVElipse
public boolean mysVElipse(double a, double b) Alias pre mysVElipse.
-
myšVoŠtvorci
public boolean myšVoŠtvorci(double polomer)
Zistí, či sa aktuálne súradnice myši nachádzajú vo štvorci so stredom na aktuálnej pozícii robota, rotovanom v smere robota a rozmerom udaným polomerom vpísanej kružnice.
- Parametre:
polomer– polomer kružnice vpísanej do štvorca so stredom na aktuálnej pozícii robota- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVCeste(),myšVElipse(double, double),myšVKruhu(double),myšVPôsobisku(),myšVObdĺžniku(double, double),myšVHviezde(double),myšVOblasti(Area),myšVKruhu()
-
mysVoStvorci
public boolean mysVoStvorci(double polomer)
Alias pre myšVoŠtvorci.
-
myšVObdĺžniku
public boolean myšVObdĺžniku(double a, double b)Zistí, či sa aktuálne súradnice myši nachádzajú v obdĺžniku pootočenom v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi udanými ako poloosi vpísanej elipsy.
- Parametre:
a– veľkosť hlavnej poloosi (šírka vpísanej elipsy)b– veľkosť vedľajšej poloosi (výška vpísanej elipsy)- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVCeste(),myšVKruhu(double),myšVElipse(double, double),myšVPôsobisku(),myšVoŠtvorci(double),myšVHviezde(double),myšVOblasti(Area),myšVKruhu()
-
mysVObdlzniku
public boolean mysVObdlzniku(double a, double b) Alias pre myšVObdĺžniku.
-
myšVHviezde
public boolean myšVHviezde(double polomer)
Zistí, či sa aktuálne súradnice myši nachádzajú v päťcípej hviezde so stredom na aktuálnej pozícii robota, rotovanej v smere robota a rozmerom udaným prostredníctvom polomeru opísanej kružnice.
- Parametre:
polomer– polomer kružnice opísanej okolo hviezdy so stredom na aktuálnej pozícii robota- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVCeste(),myšVElipse(double, double),myšVKruhu(double),myšVPôsobisku(),myšVObdĺžniku(double, double),myšVOblasti(Area),myšVKruhu()
-
mysVHviezde
public boolean mysVHviezde(double polomer)
Alias pre myšVHviezde.
-
myšVOblasti
public boolean myšVOblasti(Area oblasť)
Zistí, či sa aktuálne súradnice myši nachádzajú v zadanej oblasti, ktorá je na účely porovnania rotovaná podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť) a posunutá o súradnice robota na plátne (stred sa nachádza v bode [0, 0] – v strede plátna).
Metóda berie do úvahy aj aktuálnu mierku robota.
- Parametre:
oblasť– oblasť, ktorá má byť použitá na overenie- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVCeste(),myšVElipse(double, double),myšVKruhu(double),myšVPôsobisku(),myšVoŠtvorci(double),myšVObdĺžniku(double, double),myšVHviezde(double),myšVKruhu()
-
mysVOblasti
public boolean mysVOblasti(Area oblasť)
Alias pre myšVOblasti.
-
myšVKruhu
public boolean myšVKruhu()
Zistí, či sa aktuálne súradnice myši nachádzajú v kruhu so stredom na aktuálnej pozícii robota a polomerom s veľkosťou robota.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVElipse(double),myšVoŠtvorci(),myšVObdĺžniku(double),myšVHviezde()
-
mysVKruhu
public boolean mysVKruhu()
Alias pre myšVKruhu.
-
myšV
public boolean myšV()
Alias pre myšVKruhu.
-
mysV
public boolean mysV()
Alias pre myšVKruhu.
-
myšVElipse
public boolean myšVElipse(double pomer)
Zistí, či sa aktuálne súradnice myši nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi podľa veľkosti robota a zadaného pomeru poloosí.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
pomer– pomer veľkosť hlavnej a vedľajšej poloosi- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVKruhu(),myšVoŠtvorci(),myšVObdĺžniku(double),myšVHviezde()
-
mysVElipse
public boolean mysVElipse(double pomer)
Alias pre mysVElipse.
-
myšVElipse
public boolean myšVElipse()
Zistí, či sa aktuálne súradnice myši nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi podľa veľkosti robota a vlastnosti robota
pomer.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVKruhu(),myšVoŠtvorci(),myšVObdĺžniku(),myšVHviezde()
-
mysVElipse
public boolean mysVElipse()
Alias pre mysVElipse.
-
myšVoŠtvorci
public boolean myšVoŠtvorci()
Zistí, či sa aktuálne súradnice myši nachádzajú vo štvorci so stredom na aktuálnej pozícii robota, rotovanom v smere robota a rozmerom podľa veľkosti robota.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVElipse(double),myšVKruhu(),myšVObdĺžniku(double),myšVHviezde()
-
mysVoStvorci
public boolean mysVoStvorci()
Alias pre myšVoŠtvorci.
-
myšVObdĺžniku
public boolean myšVObdĺžniku(double pomer)
Zistí, či sa aktuálne súradnice myši nachádzajú v obdĺžniku pootočenom v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi podľa veľkosti robota a zadaného pomeru strán.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
pomer– pomer veľkosť hlavnej a vedľajšej poloosi- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVKruhu(),myšVElipse(double),myšVoŠtvorci(),myšVHviezde()
-
mysVObdlzniku
public boolean mysVObdlzniku(double pomer)
Alias pre myšVObdĺžniku.
-
myšVObdĺžniku
public boolean myšVObdĺžniku()
Zistí, či sa aktuálne súradnice myši nachádzajú v obdĺžniku pootočenom v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi podľa veľkosti robota a vlastnosti robota
pomer.Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVKruhu(),myšVElipse(),myšVoŠtvorci(),myšVHviezde()
-
mysVObdlzniku
public boolean mysVObdlzniku()
Alias pre myšVObdĺžniku.
-
myšVHviezde
public boolean myšVHviezde()
Zistí, či sa aktuálne súradnice myši nachádzajú v hviezde so stredom na aktuálnej pozícii robota, rotovanej v smere robota a rozmerom podľa veľkosti robota.
Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVElipse(double),myšVKruhu(),myšVoŠtvorci(double),myšVObdĺžniku(double)
-
mysVHviezde
public boolean mysVHviezde()
Alias pre myšVHviezde.
-
bodVKruhu
public boolean bodVKruhu(double súradnicaBoduX, double súradnicaBoduY, double polomer)Zistí, či sa súradnice zadaného bodu nachádzajú v kruhu so zadaným polomerom stredom na aktuálnej pozícii robota. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVKruhu(Poloha objekt, double polomer)- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodupolomer– polomer vyšetrovaného kruhu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVPôsobisku(double, double),bodVElipse(double, double, double, double),bodVoŠtvorci(double, double, double),bodVObdĺžniku(double, double, double, double),bodVHviezde(double, double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVKruhu
public boolean bodVKruhu(Poloha objekt, double polomer)
Funguje rovnako ako metóda
bodVKruhu(x, y, polomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodupolomer– polomer vyšetrovaného kruhu- Návratová hodnota:
true/false- Pozri tiež:
bodVPôsobisku(Poloha),bodVElipse(Poloha, double, double),bodVoŠtvorci(Poloha, double),bodVObdĺžniku(Poloha, double, double),bodVHviezde(Poloha, double),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVElipse
public boolean bodVElipse(double súradnicaBoduX, double súradnicaBoduY, double a, double b)Zistí, či sa súradnice zadaného bodu nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi zadaných poloosí. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVElipse(Poloha objekt, double a, double b)- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodua– veľkosť hlavnej poloosi (na šírku elipsy)b– veľkosť vedľajšej poloosi (na výšku elipsy)- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVPôsobisku(double, double),bodVKruhu(double, double, double),bodVoŠtvorci(double, double, double),bodVObdĺžniku(double, double, double, double),bodVHviezde(double, double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVElipse
public boolean bodVElipse(Poloha objekt, double a, double b)
Funguje rovnako ako metóda
bodVElipse(x, y, a, b), len namiesto súradníc bodu je použitá poloha zadaného objektu…- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodua– veľkosť hlavnej poloosi (na šírku elipsy)b– veľkosť vedľajšej poloosi (na výšku elipsy)- Návratová hodnota:
true/false- Pozri tiež:
bodVPôsobisku(Poloha),bodVKruhu(Poloha, double),bodVoŠtvorci(Poloha, double),bodVObdĺžniku(Poloha, double, double),bodVHviezde(Poloha, double),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVoŠtvorci
public boolean bodVoŠtvorci(double súradnicaBoduX, double súradnicaBoduY, double polomer)Zistí, či sa súradnice zadaného bodu nachádzajú vo štvorci so stredom na aktuálnej pozícii robota, rotovanom v smere robota a rozmerom udaným polomerom vpísanej kružnice. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVoŠtvorci(Poloha objekt, double polomer)- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodupolomer– polomer kružnice vpísanej do štvorca so stredom na aktuálnej pozícii robota- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVPôsobisku(double, double),bodVKruhu(double, double, double),bodVElipse(double, double, double, double),bodVObdĺžniku(double, double, double, double),bodVHviezde(double, double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVoStvorci
public boolean bodVoStvorci(double súradnicaBoduX, double súradnicaBoduY, double polomer) Alias pre bodVoŠtvorci.
-
bodVoŠtvorci
public boolean bodVoŠtvorci(Poloha objekt, double polomer)
Funguje rovnako ako metóda
bodVoŠtvorci(x, y, polomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodupolomer– polomer kružnice vpísanej do štvorca so stredom na aktuálnej pozícii robota- Návratová hodnota:
true/false- Pozri tiež:
bodVPôsobisku(Poloha),bodVKruhu(Poloha, double),bodVElipse(Poloha, double, double),bodVObdĺžniku(Poloha, double, double),bodVHviezde(Poloha, double),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVoStvorci
public boolean bodVoStvorci(Poloha objekt, double polomer)
Alias pre bodVoŠtvorci.
-
bodVObdĺžniku
public boolean bodVObdĺžniku(double súradnicaBoduX, double súradnicaBoduY, double a, double b)Zistí, či sa súradnice zadaného bodu nachádzajú v obdĺžniku so stredom na aktuálnej pozícii robota, rotovanom v smere robota a s rozmermi udanými ako poloosi vpísanej elipsy. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVObdĺžniku(Poloha objekt, double a, double b)- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodua– veľkosť hlavnej poloosi (šírka vpísanej elipsy)b– veľkosť vedľajšej poloosi (výška vpísanej elipsy)- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVPôsobisku(double, double),bodVKruhu(double, double, double),bodVElipse(double, double, double, double),bodVoŠtvorci(double, double, double),bodVHviezde(double, double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVObdlzniku
public boolean bodVObdlzniku(double súradnicaBoduX, double súradnicaBoduY, double a, double b) Alias pre bodVObdĺžniku.
-
bodVObdĺžniku
public boolean bodVObdĺžniku(Poloha objekt, double a, double b)
Funguje rovnako ako metóda
bodVObdĺžniku(x, y, a, b), len namiesto súradníc bodu je použitá poloha zadaného objektu…- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodua– veľkosť hlavnej poloosi (šírka vpísanej elipsy)b– veľkosť vedľajšej poloosi (výška vpísanej elipsy)- Návratová hodnota:
true/false- Pozri tiež:
bodVPôsobisku(Poloha),bodVKruhu(Poloha, double),bodVElipse(Poloha, double, double),bodVoŠtvorci(Poloha, double),bodVHviezde(Poloha, double),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVObdlzniku
public boolean bodVObdlzniku(Poloha objekt, double a, double b)
Alias pre bodVObdĺžniku.
-
bodVHviezde
public boolean bodVHviezde(double súradnicaBoduX, double súradnicaBoduY, double polomer)Zistí, či sa súradnice zadaného bodu nachádzajú v hviezde so stredom na aktuálnej pozícii robota, rotovanej v smere robota a rozmerom udaným polomerom opísanej kružnice. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVHviezde(Poloha objekt, double polomer)- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodupolomer– polomer kružnice opísanej okolo hviezdy so stredom na aktuálnej pozícii robota- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVPôsobisku(double, double),bodVKruhu(double, double, double),bodVElipse(double, double, double, double),bodVoŠtvorci(double, double, double),bodVObdĺžniku(double, double, double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVHviezde
public boolean bodVHviezde(Poloha objekt, double polomer)
Funguje rovnako ako metóda
bodVHviezde(x, y, polomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodupolomer– polomer kružnice opísanej okolo hviezdy so stredom na aktuálnej pozícii robota- Návratová hodnota:
true/false- Pozri tiež:
bodVPôsobisku(Poloha),bodVKruhu(Poloha, double),bodVElipse(Poloha, double, double),bodVoŠtvorci(Poloha, double),bodVObdĺžniku(Poloha, double, double),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVTvare
public boolean bodVTvare(double súradnicaBoduX, double súradnicaBoduY, Shape tvar)Zistí, či sa súradnice zadaného bodu nachádzajú v zadanom tvare[1]. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVTvare(Poloha objekt, Shape tvar).[1] – podľa definície prítomnosti bodu v tvare (originál je v anglickom jazyku, preklad nasleduje).
Podľa definície je bod považovaný za ležiaci vo vnútri tvaru vtedy a len vtedy, ak:
- leží úplne vo vnútri hraníc tvaru,
- alebo leží presne na hranici tvaru a priestor priliehajúci k bodu v stúpajúcom smere osi x je úplne umiestnený vo vnútri hraníc tvaru,
- alebo leží presne na horizontálnom segmente tvaru a priestor priliehajúci k bodu v stúpajúcom smere osi y je úplne umiestnený vo vnútri hraníc tvaru.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodutvar– tvar použitý na overenie- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
Oblasť.bodV(double, double),bodVPôsobisku(double, double),bodVKruhu(double, double, double),bodVElipse(double, double, double, double),bodVoŠtvorci(double, double, double),bodVObdĺžniku(double, double, double, double),bodVHviezde(double, double, double),bodVCeste(double, double),bodVOblasti(double, double, Area)
-
bodVTvare
public boolean bodVTvare(Poloha objekt, Shape tvar)
Funguje rovnako ako metóda
bodVTvare(x, y, tvar), len namiesto súradníc bodu je použitá poloha zadaného objektu…- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodutvar– tvar použitý na overenie- Návratová hodnota:
true/false- Pozri tiež:
Oblasť.bodV(Poloha),bodVPôsobisku(Poloha),bodVKruhu(Poloha, double),bodVElipse(Poloha, double, double),bodVoŠtvorci(Poloha, double),bodVObdĺžniku(Poloha, double, double),bodVHviezde(Poloha, double),bodVCeste(Poloha),bodVOblasti(Poloha, Area)
-
bodVKruhu
public boolean bodVKruhu(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú v kruhu s polomerom veľkosti robota a stredom na aktuálnej pozícii robota. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVKruhu(Poloha objekt)Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVElipse(double, double, double),bodVoŠtvorci(double, double),bodVObdĺžniku(double, double, double),bodVHviezde(double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodV
public boolean bodV(double súradnicaBoduX, double súradnicaBoduY) Alias pre bodVKruhu.
-
bodVKruhu
public boolean bodVKruhu(Poloha objekt)
Funguje rovnako ako metóda
bodVKruhu(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodu- Návratová hodnota:
true/false- Pozri tiež:
bodVElipse(Poloha, double),bodVoŠtvorci(Poloha),bodVObdĺžniku(Poloha, double),bodVHviezde(Poloha),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVElipse
public boolean bodVElipse(double súradnicaBoduX, double súradnicaBoduY, double pomer)Zistí, či sa súradnice zadaného bodu nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi odvodenými z veľkosti robota a zadaného pomeru strán. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVElipse(Poloha objekt, double pomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodupomer– pomer šírky a výšky elipsy- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVKruhu(double, double),bodVoŠtvorci(double, double),bodVObdĺžniku(double, double, double),bodVHviezde(double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVElipse
public boolean bodVElipse(Poloha objekt, double pomer)
Funguje rovnako ako metóda
bodVElipse(x, y, pomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodupomer– pomer šírky a výšky elipsy- Návratová hodnota:
true/false- Pozri tiež:
bodVKruhu(Poloha),bodVoŠtvorci(Poloha),bodVObdĺžniku(Poloha, double),bodVHviezde(Poloha),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVElipse
public boolean bodVElipse(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú v elipse pootočenej v smere robota, so stredom na aktuálnej pozícii robota a s rozmermi odvodenými z veľkosti robota a vlastnosti robota
pomer. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:bodVElipse(Poloha objekt).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVKruhu(double, double),bodVoŠtvorci(double, double),bodVObdĺžniku(double, double),bodVHviezde(double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVElipse
public boolean bodVElipse(Poloha objekt)
Funguje rovnako ako metóda
bodVElipse(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodu- Návratová hodnota:
true/false- Pozri tiež:
bodVKruhu(Poloha),bodVoŠtvorci(Poloha),bodVObdĺžniku(Poloha),bodVHviezde(Poloha),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVoŠtvorci
public boolean bodVoŠtvorci(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú vo štvorci so stredom na aktuálnej pozícii robota, rotovanom v smere robota a rozmerom podľa veľkosti robota. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVoŠtvorci(Poloha objekt)Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVKruhu(double, double),bodVElipse(double, double, double),bodVObdĺžniku(double, double, double),bodVHviezde(double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVoStvorci
public boolean bodVoStvorci(double súradnicaBoduX, double súradnicaBoduY) Alias pre bodVoŠtvorci.
-
bodVoŠtvorci
public boolean bodVoŠtvorci(Poloha objekt)
Funguje rovnako ako metóda
bodVoŠtvorci(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodu- Návratová hodnota:
true/false- Pozri tiež:
bodVKruhu(Poloha),bodVElipse(Poloha, double),bodVObdĺžniku(Poloha, double),bodVHviezde(Poloha),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVoStvorci
public boolean bodVoStvorci(Poloha objekt)
Alias pre bodVoŠtvorci.
-
bodVObdĺžniku
public boolean bodVObdĺžniku(double súradnicaBoduX, double súradnicaBoduY, double pomer)Zistí, či sa súradnice zadaného bodu nachádzajú v obdĺžniku so stredom na aktuálnej pozícii robota, rotovanom v smere robota a s rozmermi podľa veľkosti robota a zadaného pomeru strán. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVObdĺžniku(objekt, pomer).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodupomer– pomer šírky a výšky obdĺžnika- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVKruhu(double, double),bodVElipse(double, double, double),bodVoŠtvorci(double, double),bodVHviezde(double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVObdlzniku
public boolean bodVObdlzniku(double súradnicaBoduX, double súradnicaBoduY, double pomer) Alias pre bodVObdĺžniku.
-
bodVObdĺžniku
public boolean bodVObdĺžniku(Poloha objekt, double pomer)
Funguje rovnako ako metóda
bodVObdĺžniku(x, y, pomer), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodupomer– pomer šírky a výšky obdĺžnika- Návratová hodnota:
true/false- Pozri tiež:
bodVKruhu(Poloha),bodVElipse(Poloha, double),bodVoŠtvorci(Poloha),bodVHviezde(Poloha),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVObdlzniku
public boolean bodVObdlzniku(Poloha objekt, double pomer)
Alias pre bodVObdĺžniku.
-
bodVObdĺžniku
public boolean bodVObdĺžniku(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú v obdĺžniku so stredom na aktuálnej pozícii robota, rotovanom v smere robota a s rozmermi podľa veľkosti robota a vlastnosti robota
pomer. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:bodVObdĺžniku(objekt).Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVKruhu(double, double),bodVElipse(double, double),bodVoŠtvorci(double, double),bodVHviezde(double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVObdlzniku
public boolean bodVObdlzniku(double súradnicaBoduX, double súradnicaBoduY) Alias pre bodVObdĺžniku.
-
bodVObdĺžniku
public boolean bodVObdĺžniku(Poloha objekt)
Funguje rovnako ako metóda
bodVObdĺžniku(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodu- Návratová hodnota:
true/false- Pozri tiež:
bodVKruhu(Poloha),bodVElipse(Poloha, double),bodVoŠtvorci(Poloha),bodVHviezde(Poloha),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
bodVObdlzniku
public boolean bodVObdlzniku(Poloha objekt)
Alias pre bodVObdĺžniku.
-
bodVHviezde
public boolean bodVHviezde(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú v hviezde so stredom na aktuálnej pozícii robota, rotovanej v smere robota a rozmerom podľa veľkosti robota. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVHviezde(Poloha objekt)Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVKruhu(double, double),bodVElipse(double, double, double),bodVoŠtvorci(double, double),bodVObdĺžniku(double, double, double),bodVCeste(double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVHviezde
public boolean bodVHviezde(Poloha objekt)
Funguje rovnako ako metóda
bodVHviezde(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…Informácia: Mierka nemá na funkciu tejto metódy vplyv.
- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodu- Návratová hodnota:
true/false- Pozri tiež:
bodVKruhu(Poloha),bodVElipse(Poloha, double),bodVoŠtvorci(Poloha, double),bodVObdĺžniku(Poloha, double),bodVCeste(Poloha),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
obrázok
public void obrázok(String súbor)
Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia. Pozri aj
spôsobKreslenia. Predvolene to znamená obrázok rotovaný kolmo na aktuálny smer robota a vycentrovaný na aktuálnej polohe robota. Takže pri základných hodnotách robota, sa obrázok zobrazí vodorovne v strede plátna (pretože robot je na začiatku umiestnený v strede podlahy (v bode [0, 0]) a smeruje hore (v uhle 90°)). Veľkosť kresleného obrázka je ovplyvňovaná mierkou robota, ktorá je v predvolenom stave pomerom aktuálnej veľkosti robota a veľkosti robota, ktorú mal pri svojom vytvorení. Mierka sa dá upravovať metódoumierkaa resetuje sa i pri zmene vlastného obrázkového tvaru robota.- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslený- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String, double),obrázok(String, double, double),obrázok(String, double, double, double),obrázok(String, int),obrázok(String, int, double),obrázok(String, int, double, double),obrázok(String, int, double, double, double)
-
obrázok
public void obrázok(String súbor, double mierka)
Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia. Pozri aj
spôsobKreslenia. Predvolene to znamená obrázok rotovaný kolmo na aktuálny smer robota a vycentrovaný na aktuálnej polohe robota. Takže pri základných hodnotách robota, sa obrázok zobrazí vodorovne v strede plátna (pretože robot je na začiatku umiestnený v strede podlahy (v bode [0, 0]) a smeruje hore (v uhle 90°)).- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslený- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String),obrázok(String, double, double),obrázok(String, double, double, double),obrázok(String, int),obrázok(String, int, double),obrázok(String, int, double, double),obrázok(String, int, double, double, double)
-
obrázok
public void obrázok(String súbor, int spôsobKreslenia)
Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia. Veľkosť kresleného obrázka je ovplyvňovaná mierkou robota, ktorá je v predvolenom stave pomerom aktuálnej veľkosti robota a veľkosti robota, ktorú mal pri svojom vytvorení. Mierka sa dá upravovať metódou
mierkaa resetuje sa i pri zmene vlastného obrázkového tvaru robota.- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String),obrázok(String, double),obrázok(String, double, double),obrázok(String, double, double, double),obrázok(String, int, double),obrázok(String, int, double, double),obrázok(String, int, double, double, double)
-
obrázok
public void obrázok(String súbor, int spôsobKreslenia, double mierka)
Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia.
Obrázok prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)Poznámka: Tieto metódy nesmú brať do úvahy priehľadnosť robota. Kolidovalo by to s inými mechanizmami programovacieho rámca. Je dosť iných spôsobov ako nakresliť spriehľadnaný obrázok. Napríklad nastaviť priehľadnosť inštancii triedy
Obrázokalebo kresliť obrázkový tvar spriehľadneného robota.- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.mierka– určuje mierku (zväčšenie alebo zmenšenie) kreslenia obrázka; príklady: 1.0 – originálna veľkosť, 2.0 – dvojnásobná veľkosť, 0.5 – polovičná veľkosť- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String),obrázok(String, double),obrázok(String, double, double),obrázok(String, double, double, double),obrázok(String, int),obrázok(String, int, double, double),obrázok(String, int, double, double, double)
-
obrázok
public void obrázok(String súbor, double Δx, double Δy)
Nakreslí obrázok v mierke robota na pozícii robota podľa aktuálneho spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Pozri aj
spôsobKreslenia.- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslenýΔx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi y- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String),obrázok(String, double),obrázok(String, double, double, double),obrázok(String, int),obrázok(String, int, double),obrázok(String, int, double, double),obrázok(String, int, double, double, double)
-
obrázok
public void obrázok(String súbor, int spôsobKreslenia, double Δx, double Δy)
Nakreslí obrázok v mierke robota na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy.
- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.Δx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi y- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String),obrázok(String, double),obrázok(String, double, double),obrázok(String, double, double, double),obrázok(String, int),obrázok(String, int, double),obrázok(String, int, double, double, double)
-
obrazok
public void obrazok(String súbor, int spôsobKreslenia, double Δx, double Δy)
Alias pre obrázok.
-
obrázok
public void obrázok(String súbor, double Δx, double Δy, double mierka)
Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Pozri aj
spôsobKreslenia. Odchýlky otáčania sú upravené podľa mierky.- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslenýΔx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi ymierka– určuje mierku (zväčšenie alebo zmenšenie) kreslenia obrázka; príklady: 1.0 – originálna veľkosť, 2.0 – dvojnásobná veľkosť, 0.5 – polovičná veľkosť- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String),obrázok(String, double),obrázok(String, double, double),obrázok(String, int),obrázok(String, int, double),obrázok(String, int, double, double),obrázok(String, int, double, double, double)
-
obrázok
public void obrázok(String súbor, int spôsobKreslenia, double Δx, double Δy, double mierka)
Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Odchýlky otáčania sú upravené podľa zadanej mierky.
Obrázok prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)Poznámka: Tieto metódy nesmú brať do úvahy priehľadnosť robota. Kolidovalo by to s inými mechanizmami programovacieho rámca. Je dosť iných spôsobov ako nakresliť spriehľadnaný obrázok. Napríklad nastaviť priehľadnosť inštancii triedy
Obrázokalebo kresliť obrázkový tvar spriehľadneného robota.- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.Δx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi ymierka– určuje mierku (zväčšenie alebo zmenšenie) kreslenia obrázka; príklady: 1.0 – originálna veľkosť, 2.0 – dvojnásobná veľkosť, 0.5 – polovičná veľkosť- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String),obrázok(String, double),obrázok(String, double, double),obrázok(String, double, double, double),obrázok(String, int),obrázok(String, int, double),obrázok(String, int, double, double)
-
obrazok
public void obrazok(String súbor, int spôsobKreslenia, double Δx, double Δy, double mierka)
Alias pre obrázok.
-
obrázok
public void obrázok(Image obrázok)
Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia. Pozri aj
spôsobKreslenia. Predvolene to znamená obrázok rotovaný kolmo na aktuálny smer robota a vycentrovaný na aktuálnej polohe robota. Takže pri základných hodnotách robota, sa obrázok zobrazí vodorovne v strede plátna (pretože robot je na začiatku umiestnený v strede podlahy (v bode [0, 0]) a smeruje hore (v uhle 90°)). Veľkosť kresleného obrázka je ovplyvňovaná mierkou robota, ktorá je v predvolenom stave pomerom aktuálnej veľkosti robota a veľkosti robota, ktorú mal pri svojom vytvorení. Mierka sa dá upravovať metódoumierkaa resetuje sa i pri zmene vlastného obrázkového tvaru robota.- Parametre:
obrázok– obrázok, ktorý má byť vykreslený- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrázok
public void obrázok(Image obrázok, double mierka)
Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia. Pozri aj
spôsobKreslenia. Predvolene to znamená obrázok rotovaný kolmo na aktuálny smer robota a vycentrovaný na aktuálnej polohe robota. Takže pri základných hodnotách robota, sa obrázok zobrazí vodorovne v strede plátna (pretože robot je na začiatku umiestnený v strede podlahy (v bode [0, 0]) a smeruje hore (v uhle 90°)).- Parametre:
obrázok– obrázok, ktorý má byť vykreslený- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrázok
public void obrázok(Image obrázok, int spôsobKreslenia)
Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia. Obrázok je všeobecný typ
Image, za ktorý môže byť dosadený aj objekt typuObrázok. Veľkosť kresleného obrázka je ovplyvňovaná mierkou robota, ktorá je v predvolenom stave pomerom aktuálnej veľkosti robota a veľkosti robota, ktorú mal pri svojom vytvorení. Mierka sa dá upravovať metódoumierkaa resetuje sa i pri zmene vlastného obrázkového tvaru robota.Poznámka: Tieto metódy nesmú brať do úvahy priehľadnosť robota. Kolidovalo by to s inými mechanizmami programovacieho rámca. Je dosť iných spôsobov ako nakresliť spriehľadnaný obrázok. Napríklad nastaviť priehľadnosť inštancii triedy
Obrázokalebo kresliť obrázkový tvar spriehľadneného robota.- Parametre:
obrázok– obrázok, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrázok
public void obrázok(Image obrázok, int spôsobKreslenia, double mierka)
Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia. Obrázok je všeobecný typ
Image, za ktorý môže byť dosadený aj objekt typuObrázok.- Parametre:
obrázok– obrázok, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.mierka– určuje mierku (zväčšenie alebo zmenšenie) kreslenia obrázka; príklady: 1.0 – originálna veľkosť, 2.0 – dvojnásobná veľkosť, 0.5 – polovičná veľkosť- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrázok
public void obrázok(Image obrázok, double Δx, double Δy)
Nakreslí obrázok v mierke robota na pozícii robota podľa aktuálneho spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Pozri aj
spôsobKreslenia. Obrázok je všeobecný typImage, za ktorý môže byť dosadený aj objekt typuObrázok.- Parametre:
obrázok– obrázok, ktorý má byť vykreslenýΔx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi y- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrázok
public void obrázok(Image obrázok, double Δx, double Δy, double mierka)
Nakreslí obrázok na pozícii robota podľa aktuálneho spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Pozri aj
spôsobKreslenia. Obrázok je všeobecný typImage, za ktorý môže byť dosadený aj objekt typuObrázok. Odchýlky otáčania sú upravené podľa mierky.Komplexný interaktívny príklad použitia tejto metódy je v opise metódy
obrázok(obrázok, spôsobKreslenia, Δx, Δy, mierka).- Parametre:
obrázok– obrázok, ktorý má byť vykreslenýΔx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi ymierka– určuje mierku (zväčšenie alebo zmenšenie) kreslenia obrázka; príklady: 1.0 – originálna veľkosť, 2.0 – dvojnásobná veľkosť, 0.5 – polovičná veľkosť- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrázok
public void obrázok(Image obrázok, int spôsobKreslenia, double Δx, double Δy)
Nakreslí obrázok v mierke robota na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Obrázok je všeobecný typ
Image, za ktorý môže byť dosadený aj objekt typuObrázok.- Parametre:
obrázok– obrázok, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.Δx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi y- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrazok
public void obrazok(Image obrázok, int spôsobKreslenia, double Δx, double Δy)
Alias pre obrázok.
-
obrázok
public void obrázok(Image obrázok, int spôsobKreslenia, double Δx, double Δy, double mierka)
Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Obrázok je všeobecný typ
Image, za ktorý môže byť dosadený aj objekt typuObrázok. Odchýlky otáčania sú upravené podľa mierky.Príklad:
Nasledujúci príklad ukazuje možnosti transformácie obrázkov pomocou programovacieho rámca GRobot. Príklad je interaktívny. Po preložení a spustení sú na obrazovke zobrazené informácie o tom, ako je možné zobrazený obrázok transformovať, pričom používateľ rýchlo zistí, že obrázkom (a jeho transformáciami) vlastne na plátno kreslí.
importknižnica.*;publicclassTestRotovaniaObrázkovextendsGRobot{// Posunutie stredu rotácie a mierka obrázka.privatedoubleΔx =0.0, Δy =0.0, mierka =1.0;// Obrázok, ktorý bude transformovaný.privateObrázokobrázok;// Metóda na „vyrobenie“ obsahu obrázka.privatevoidvyrobObrázok() { obrázok =newObrázok(300,200);kresliNaObrázok(obrázok);farba(199,201,203,5);for(doublei =1.0; i >0.0; i -=0.03)vyplňElipsu(150.0* i,100.0* i);farba(99,101,103);nekresliTvary();písmo("Arial",32);skočNa(0,10);Oblasťtext1 =newOblasť(text("Text v elipse"));vyplňOblasť(text1);písmo("Arial",16);skočNa(0, -20);Oblasťtext2 =newOblasť(text("na testovanie rotácie obrázka…"));vyplňOblasť(text2); obrázok.rozmaž();farba(čierna);písmo("Arial",32);skočNa(0,10);vyplňOblasť(text1);písmo("Arial",16);skočNa(0, -20);vyplňOblasť(text2);kresliNaPodlahu();kresliTvary(); }// Konštruktor.privateTestRotovaniaObrázkov() {super(600,400);skry(); vyrobObrázok();Svet.vypíšRiadok("Ťahaním myšou (alebo klikom) sa dá dosiahnuť:");Svet.vypíšRiadok(" Shift – vysunutie stredu otáčania");Svet.vypíšRiadok(" Control – zmena mierky obrázka");Svet.vypíšRiadok(" Alt – rotácia obrázka");Svet.vypíšRiadok("«bez modifikátora» – presunutie obrázka"); kreslenie(); }// Metóda, ktorá pridáva transformovaný obrázok ku kresbe na plátne.publicvoidkreslenie() {Bodbod =poloha();obrázok(obrázok, Δx, Δy, mierka);farba(modrá);kruh(4);skoč(Δx, Δy);farba(červená);kruh(3);skočNa(bod);farba(čierna); }// Reakcia na kliknutie.@Overridepublicvoidklik() {ťahanieMyšou(); }// Reakcia na ťahanie myšou.@OverridepublicvoidťahanieMyšou() {if(ÚdajeUdalostí.myš().isShiftDown()) { Δx =ÚdajeUdalostí.polohaMyšiX() -polohaX(); Δy =ÚdajeUdalostí.polohaMyšiY() -polohaY(); }elseif(ÚdajeUdalostí.myš().isControlDown()) { mierka =vzdialenosťKMyši() /125.0; }elseif(ÚdajeUdalostí.myš().isAltDown()) {Bodbod =poloha();skoč(Δx, Δy);otočNaMyš();skočNa(bod); }else{skočNaMyš(); } kreslenie(); }// Hlavná metóda.publicstaticvoidmain(String[] args) {newTestRotovaniaObrázkov(); } }Výsledok:
Ukážka možného výsledku experimentovania s obrázkom.Poznámka: Tieto metódy nesmú brať do úvahy priehľadnosť robota. Kolidovalo by to s inými mechanizmami programovacieho rámca. Je dosť iných spôsobov ako nakresliť spriehľadnaný obrázok. Napríklad nastaviť priehľadnosť inštancii triedy
Obrázokalebo kresliť obrázkový tvar spriehľadneného robota.- Parametre:
obrázok– obrázok, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.Δx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi ymierka– určuje mierku (zväčšenie alebo zmenšenie) kreslenia obrázka; príklady: 1.0 – originálna veľkosť, 2.0 – dvojnásobná veľkosť, 0.5 – polovičná veľkosť- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrazok
public void obrazok(Image obrázok, int spôsobKreslenia, double Δx, double Δy, double mierka)
Alias pre obrázok.
-
obrázok
public void obrázok(String súbor, int spôsobKreslenia, double Δx, double Δy, double mierkaX, double mierkaY)
Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Odchýlky otáčania sú upravené podľa zadanej mierky.
Obrázok prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)Poznámka: Tieto metódy nesmú brať do úvahy priehľadnosť robota. Kolidovalo by to s inými mechanizmami programovacieho rámca. Je dosť iných spôsobov ako nakresliť spriehľadnaný obrázok. Napríklad nastaviť priehľadnosť inštancii triedy
Obrázokalebo kresliť obrázkový tvar spriehľadneného robota.- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.Δx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi ymierkaX– určuje mierku šírky obrázkamierkaY– určuje mierku šírky obrázka- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(String),obrázok(String),obrázok(String, double),obrázok(String, double, double),obrázok(String, double, double, double),obrázok(String, int),obrázok(String, int, double),obrázok(String, int, double, double)
-
obrazok
public void obrazok(String súbor, int spôsobKreslenia, double Δx, double Δy, double mierkaX, double mierkaY)
Alias pre obrázok.
-
obrázok
public void obrázok(Image obrázok, int spôsobKreslenia, double Δx, double Δy, double mierkaX, double mierkaY)
Nakreslí obrázok na pozícii robota podľa zadaného spôsobu kreslenia s vysunutím stredu otáčania o zadané odchýlky Δx a Δy. Obrázok je všeobecný typ
Image, za ktorý môže byť dosadený aj objekt typuObrázok. Odchýlky otáčania sú upravené podľa mierky.Poznámka: Tieto metódy nesmú brať do úvahy priehľadnosť robota. Kolidovalo by to s inými mechanizmami programovacieho rámca. Je dosť iných spôsobov ako nakresliť spriehľadnaný obrázok. Napríklad nastaviť priehľadnosť inštancii triedy
Obrázokalebo kresliť obrázkový tvar spriehľadneného robota.- Parametre:
obrázok– obrázok, ktorý má byť vykreslenýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.Δx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi ymierkaX– určuje mierku šírky obrázkamierkaY– určuje mierku výšky obrázka- Výnimky:
GRobotException– ak je obrázok poškodený alebo nebol nájdený
-
obrazok
public void obrazok(Image obrázok, int spôsobKreslenia, double Δx, double Δy, double mierkaX, double mierkaY)
Alias pre obrázok.
-
text
public Shape text(String text)
Napíše[1] zadaný text na pozícii robota podľa aktuálneho spôsobu kreslenia (pozri:
spôsobKreslenia) alebo vytvorí tvar obrysu zadaného textu (čo záleží na tom, či je tento robot momentálne zamestnaný alebo nie a či je zakázané kreslenie tvarov; pozri vysvetlenie pri návratovej hodnote). Predvolene roboty píšu text rotovaný kolmo na ich aktuálny smer a vycentrovaný na ich aktuálnej polohe. Takže pri základných hodnotách robota, sa text zobrazí vodorovne v strede plátna (pretože robot býva pri vytvorení umiestnený v strede podlahy (v bode [0, 0]) a nasmerovaný hore (v uhle 90°)).[1] – alebo skôr „nakreslí“ zadaný text – písanie textu robotom totiž prebieha podobne, ako keby robot vytvoril z textu pečiatku a tú vytlačil podľa aktuálneho spôsobu kreslenia (predvolene vycentrovanú na svojej pozícii a rotovanú podľa svojho smeru); jednoducho s textom napísaným robotom je zaobchádzané ako s grafikou…
Poznámka: Táto metóda nemôže prijímať variabilný počet argumentov (podobne ako metódy sveta
vypíšavypíšRiadok), pretože má definované rôzne verzie, ktoré umožňujú programátorovi operatívne meniť spôsob (a/alebo polohu) kreslenia textov. Z toho dôvodu bola definovaná statická metódaS, ktorá prijíma variabilný počet argumentov, ktoré konvertuje na jeden zlúčený reťazec. (Na získanie ďalších podrobností pozri opis metódyS.)- Parametre:
text– text, ktorý má byť vypísaný- Návratová hodnota:
- ak nie je robot zamestnaný a je povolené
kreslenie tvarov, metóda píše text a má návratovú hodnotu
null; v opačnom prípade metóda nenapíše nič a vracia objekt typuShape(tvar) reprezentujúci obrys zadaného textu (tvar textu) - Pozri tiež:
Plátno.vypíš(Object...),Plátno.vypíšRiadok(Object...),text(String, int),text(String, double, double),text(String, int, double, double)
-
text
public Shape text(String text, double Δx, double Δy)
Napíše[1] zadaný text na pozícii robota podľa aktuálneho spôsobu kreslenia (pozri:
spôsobKreslenia) a s vysunutím stredu otáčania o zadané odchýlky Δx a Δy alebo vytvorí tvar obrysu zadaného textu (čo záleží na tom, či je tento robot momentálne zamestnaný alebo nie a či je zakázané kreslenie tvarov; pozri vysvetlenie pri návratovej hodnote). Predvolene roboty píšu text rotovaný kolmo na ich aktuálny smer a vycentrovaný na ich aktuálnej polohe. Takže pri základných hodnotách robota, sa text zobrazí vodorovne v strede plátna (pretože robot býva pri vytvorení umiestnený v strede podlahy (v bode [0, 0]) a nasmerovaný hore (v uhle 90°)).[1] – alebo skôr „nakreslí“ zadaný text – písanie textu robotom totiž prebieha podobne, ako keby robot vytvoril z textu pečiatku a tú vytlačil podľa aktuálneho spôsobu kreslenia (predvolene vycentrovanú na svojej pozícii a rotovanú podľa svojho smeru); jednoducho s textom napísaným robotom je zaobchádzané ako s grafikou…
Poznámka: Táto metóda nemôže prijímať variabilný počet argumentov (podobne ako metódy sveta
vypíšavypíšRiadok), pretože má definované rôzne verzie, ktoré umožňujú programátorovi operatívne meniť spôsob (a/alebo polohu) kreslenia textov. Z toho dôvodu bola definovaná statická metódaS, ktorá prijíma variabilný počet argumentov, ktoré konvertuje na jeden zlúčený reťazec. (Na získanie ďalších podrobností pozri opis metódyS.)- Parametre:
text– text, ktorý má byť vypísanýΔx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi y- Návratová hodnota:
- ak nie je robot zamestnaný a je povolené
kreslenie tvarov, metóda píše text a má návratovú hodnotu
null; v opačnom prípade metóda nenapíše nič a vracia objekt typuShape(tvar) reprezentujúci obrys zadaného textu (tvar textu) - Pozri tiež:
Plátno.vypíš(Object...),Plátno.vypíšRiadok(Object...),text(String),text(String, int),text(String, int, double, double)
-
text
public Shape text(String text, int spôsobKreslenia)
Napíše[1] zadaný text na pozícii robota podľa zadaného spôsobu kreslenia alebo vytvorí tvar obrysu zadaného textu. Záleží od toho, či je tento robot zamestnaný a či je zakázané kreslenie tvarov (pozri vysvetlenie pri návratovej hodnote).
[1] – alebo skôr „nakreslí“ zadaný text – písanie textu robotom totiž prebieha podobne, ako keby robot vytvoril z textu pečiatku a tú vytlačil podľa aktuálneho spôsobu kreslenia…
Poznámka: Táto metóda nemôže prijímať variabilný počet argumentov (podobne ako metódy sveta
vypíšavypíšRiadok), pretože má definované rôzne verzie, ktoré umožňujú programátorovi operatívne meniť spôsob (a/alebo polohu) kreslenia textov. Z toho dôvodu bola definovaná statická metódaS, ktorá prijíma variabilný počet argumentov, ktoré konvertuje na jeden zlúčený reťazec. (Na získanie ďalších podrobností pozri opis metódyS.)- Parametre:
text– text, ktorý má byť vypísanýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.- Návratová hodnota:
- ak nie je robot zamestnaný a je povolené
kreslenie tvarov, metóda píše text a má návratovú hodnotu
null; v opačnom prípade metóda nenapíše nič a vracia objekt typuShape(tvar) reprezentujúci obrys zadaného textu (tvar textu) - Pozri tiež:
Plátno.vypíš(Object...),Plátno.vypíšRiadok(Object...),text(String),text(String, double, double),text(String, int, double, double),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
text
public Shape text(String text, int spôsobKreslenia, double Δx, double Δy)
Napíše[1] zadaný text na pozícii robota podľa zadaného spôsobu kreslenia a s vysunutím stredu otáčania o zadané odchýlky Δx a Δy alebo vytvorí tvar obrysu zadaného textu. Záleží od toho, či je tento robot zamestnaný a či je zakázané kreslenie tvarov (pozri vysvetlenie pri návratovej hodnote).
[1] – alebo skôr „nakreslí“ zadaný text – písanie textu robotom totiž prebieha podobne, ako keby robot vytvoril z textu pečiatku a tú vytlačil podľa aktuálneho spôsobu kreslenia…
Poznámka: Táto metóda nemôže prijímať variabilný počet argumentov (podobne ako metódy sveta
vypíšavypíšRiadok), pretože má definované rôzne verzie, ktoré umožňujú programátorovi operatívne meniť spôsob (a/alebo polohu) kreslenia textov. Z toho dôvodu bola definovaná statická metódaS, ktorá prijíma variabilný počet argumentov, ktoré konvertuje na jeden zlúčený reťazec. (Na získanie ďalších podrobností pozri opis metódyS.)- Parametre:
text– text, ktorý má byť vypísanýspôsobKreslenia– môže byť buď hodnotaKonštanty.KRESLI_PRIAMO, alebo kombinácia hodnôtKonštanty.KRESLI_NA_STREDaKonštanty.KRESLI_ROTOVANÉ.Δx– vysunutie stredu otáčania v smere osi xΔy– vysunutie stredu otáčania v smere osi y- Návratová hodnota:
- ak nie je robot zamestnaný a je povolené
kreslenie tvarov, metóda píše text a má návratovú hodnotu
null; v opačnom prípade metóda nenapíše nič a vracia objekt typuShape(tvar) reprezentujúci obrys zadaného textu (tvar textu) - Pozri tiež:
Plátno.vypíš(Object...),Plátno.vypíšRiadok(Object...),text(String),text(String, double, double),text(String, int),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),kresliHviezdu(double),vyplňHviezdu(double),cesta(),kresliTvary,nekresliTvary,Oblasť.zamestnaj(GRobot),Oblasť.uvoľni()
-
upravText
public boolean upravText(String text)
Táto metóda umožní používateľovi upraviť text priamo na plátne. Správa sa rovnako ako metóda
upravTextso zadanou zápornou hodnotou predvolenej šírky textového komponentu. V opise uvedenej metódy sú príklady použitia mechanizmu úpravy textov.- Parametre:
text– predvolený textu určený na úpravu- Návratová hodnota:
trueak sa úpravu podarilo zahájiť, inakfalse- Pozri tiež:
upravText(String, double),ukončenieÚpravyTextu(String, int)
-
upravText
public boolean upravText(String text, double šírka)
Táto metóda umožní používateľovi upraviť text priamo na plátne. Metóda zobrazí na aktuálnych súradniciach robota priehľadný komponent na úpravu textu so zadaným textom vo farbe aktuálneho robota. Po stlačení
ENTER,ESC,TAB,Shift + TABalebo po deaktivácii textového komponentu je úprava automaticky ukončená a je spustená metódaukončenieÚpravyTextu, ktorú by mal programátor prekryť a zariadiť spracovanie zadaného textu.Príklady:
Prvý príklad je jednoduchší. Výsledok po spustení programu vyzerá takto:

(Plátno v ukážke je zmenšené.)Po kliknutí na ľubovoľné miesto na ploche sa začne úprava textu (ak už neprebieha). Ak sa úprava textu neskončí stlačením klávesu
ESC, tak sa zmeny textu prijmú. (Niekedy môže byť žiadnuce, aby sa zmeny prijali v každom prípade. Vtedy treba podmienkuif(SPÔSOB_ESCAPE!= spôsob)odstrániť alebo prislúchajúcim spôsobom upraviť.)importknižnica.*;publicclassTestÚpravTextovextendsGRobot{// Textov určený na úpravuprivateStringtext ="Môj text na úpravu";// Súkromný konštruktor hlavnej triedyprivateTestÚpravTextov() {skry();text(text); }// Obsluha udalosti kliknutia myšou – odštartuje úpravu (ak neprebieha)@Overridepublicvoidklik() {if(upravText(text,200))podlaha.vymažGrafiku(); }// Prekrytá metóda spracúvajúca ukončenie aktuálnej úpravy@OverridepublicvoidukončenieÚpravyTextu(Stringtext,intspôsob) {// Text sa uloží len ak nebol stlačený kláves ESCAPE,…if(SPÔSOB_ESCAPE!= spôsob)this.text = text;// …ale vypíše sa v každom prípade.text(this.text); }// Hlavná metódapublicstaticvoidmain(Stringargs[]) {newTestÚpravTextov(); } }Nasledujúci príklad je komplikovanejší – ukazuje ako striedavo upravovať niekoľko textov na ploche. Tesne po spustení vyzerá obsah plátna takto:
(Plátno v ukážke je zmenšené.)importknižnica.*;publicclassTestÚpravTextovextendsGRobot{// Využitie triedy Častica na definovanie novej triedy,// ktorá bude použitá na uchovávanie textových objektov,// ktoré budú upravovateľné. Trieda využíva služby hlavného// robota.privateclassTextNaÚpravuextendsČastica{// Aktuálna hodnota textu určeného na úpravupublicStringtext;// Aktuálna farba textu určeného na úpravupublicFarbafarba;// KonštruktorpublicTextNaÚpravu(Stringtext,doublex,doubley,Farbafarba) {this.text = text;this.x = x;this.y = y;this.farba = farba; }// Nakreslenie textupublicvoidnakresli() {skočNa(this);farba(farba);text(text); } }// Pole inštancií textov určených na úpravyprivateTextNaÚpravu texty[] = {newTextNaÚpravu("Červený text",0,50,červená),newTextNaÚpravu("Zelený text",0,0,zelená),newTextNaÚpravu("Modrý text",0, -50,modrá), };// Inštancia, ktorá si bude uchovávať aktuálne upravovaný objektprivateTextNaÚpravu upravujeSa =null;// Súkromný konštruktor hlavnej triedyprivateTestÚpravTextov() {skry();písmo("Calibri",30);for(TextNaÚpravu text : texty) text.nakresli(); }// Obsluha udalosti kliknutia myšou@Overridepublicvoidklik() {if(null== upravujeSa) {// Zakaždým, keď sa nič neupravuje, tak sa prekreslí// obrazovka a ak sa pritom zistí, že bolo kliknuté// v rámci vymedzeného obdĺžnika niektorého z textov,// tak sa zaháji jeho úprava…podlaha.vymažGrafiku();for(TextNaÚpravu text : texty) {skočNa(text);if(myšVObdĺžniku(100,20)) {skočNa(text);farba(text.farba);upravText(text.text,200); upravujeSa = text; }elsetext.nakresli(); } } }// Prekrytá metóda spracúvajúca ukončenie aktuálnej úpravy@OverridepublicvoidukončenieÚpravyTextu(Stringtext,intspôsob) {if(SPÔSOB_ESCAPE!= spôsob) upravujeSa.text = text;
// Na tomto mieste by bolo vhodné implementovať mechanizmus// pohybu po upravovaných inštanciách klávesom TAB (pohyb// dopredu – SPÔSOB_TABULÁTOR == spôsob, pohyb dozadu –// – SPÔSOB_SHIFT_TABULÁTOR == spôsob). Stačilo by nájsť,// ten prvok v poli, ktorý je práve upravovaný a podľa toho// zahájiť úpravu nasledujúceho alebo predchádzajúceho prvku.// Aby bol tento príklad kratší, tak podrobná implementácia// tohto mechanizmu je uvedená nižšie, za týtmo príkladom…
// Nakreslí a ukončí sa úprava aktuálneho prvkuupravujeSa.nakresli(); upravujeSa =null; }// Hlavná metódapublicstaticvoidmain(Stringargs[]) {newTestÚpravTextov(); } }Ďalej je uvedená implementácia presúvania sa medzi textami tabulátorom, ktorá je spomenutá v komentároch príkladu vyššie. Touto implementáciou treba nahradiť trojicu riadkov začínajúcu sa komentárom
// Nakreslí a ukončí sa úprava aktuálneho prvku(na konci reakcieukončenieÚpravyTextu– pár riadkov od konca zdrojového kódu celého príkladu):// Táto inštancia bude slúžiť na signalizáciu zahájenia úpravy// nového textu – pri posunutí klávesom TAB to bude nasledujúca// inštancia v poli, pri posunutí naspäť (Shift + TAB) to bude// predchádzajúca… (Predvolene to nebude žiadna.)TextNaÚpravu začniÚpravuNovéhoTextu =null;if(SPÔSOB_TABULÁTOR== spôsob) {if(upravujeSa == texty[texty.length -1]) {// Posledná inštancia presunie upravovanie na prvú:začniÚpravuNovéhoTextu = texty[0]; }elsefor(inti = texty.length -2; i >=0; --i) {// Je jedno v akom smere prehľadávame pole, tak// sme sa rozhodli pre spätné vyhľadávanie (aby// sme cyklus mierne výpočtovo odľahčili…).// Po nájdení aktuálneho prvku „označíme“ nasledujúci:if(upravujeSa == texty[i]) { začniÚpravuNovéhoTextu = texty[i +1];break; } } }elseif(SPÔSOB_SHIFT_TABULÁTOR== spôsob) {if(upravujeSa == texty[0]) {// Prvá inštancia presunie upravovanie na poslednú:začniÚpravuNovéhoTextu = texty[texty.length -1]; }elsefor(inti =1; i < texty.length; ++i) {// Prehľadávame od druhej inštancie po poslednú.// Po nájdení aktuálneho prvku „označíme“ predchádzajúci:if(upravujeSa == texty[i]) { začniÚpravuNovéhoTextu = texty[i –1];break; } } }// Nakreslí a ukončí sa úprava aktuálneho prvkuupravujeSa.nakresli(); upravujeSa =null;// Ak sme predtým zadali požiadavku na zahájenie úpravy// nového textu, tak túto požiadavku korektne spracujeme:if(null!= začniÚpravuNovéhoTextu) {// Vymazanie podlahy a prekreslenie ostatných textovpodlaha.vymažGrafiku();for(TextNaÚpravu prekresli : texty)if(začniÚpravuNovéhoTextu != prekresli) prekresli.nakresli();skočNa(začniÚpravuNovéhoTextu);farba(začniÚpravuNovéhoTextu.farba);upravText(začniÚpravuNovéhoTextu.text,200); upravujeSa = začniÚpravuNovéhoTextu; }- Parametre:
text– predvolený textu určený na úpravušírka– predvolená šírka textového komponentu – ak je zadané záporné číslo, tak bude mať komponent šírku totožnú so šírkou prevoleného textu- Návratová hodnota:
trueak sa úpravu podarilo zahájiť, inakfalse- Pozri tiež:
upravText(String),ukončenieÚpravyTextu(String, int)
-
ukončenieÚpravyTextu
public void ukončenieÚpravyTextu(String text, int spôsob)
Táto metóda je predvolene prázdna. Je určená na prekrytie a je spúšťaná po ukončení úpravy textu začatej metódou
upravText. Prvý argumet je konečná podoba upraveného textu a druhý argument je jeden z nasledujúcich spôsobov:SPÔSOB_ESCAPE– bol stlačený kláves ESCSPÔSOB_ENTER– bol stlačený kláves ENTERSPÔSOB_TABULÁTOR
SPÔSOB_TAB– bol stlačený kláves TABULÁTORSPÔSOB_SHIFT_TABULÁTORSPÔSOB_SHIFT_TAB– bola stlačená klávesová kombinácia Shift + tabulátorSPÔSOB_DEAKTIVÁCIA– komponent textového prvku bol deaktivovaný (napríklad po kliknutí myšou na plátno) - Parametre:
text– konečná podoba upraveného textu, ktorá môže byť spracovaná podľa potrebyspôsob– jeden z vyššie uvedených spôsobov ukončenia úpravy textu- Pozri tiež:
upravText(String),upravText(String, double)
-
ukoncenieUpravyTextu
public void ukoncenieUpravyTextu(String text, int spôsob)
Alias pre ukončenieÚpravyTextu.
-
F
public String F(double číslo, int desatinné)
Táto metóda slúži na jednoduché formátovanie reálnych čísiel. Prijíma reálne číslo a hodnotu počtu desatinných miest, ktoré majú byť zobrazené. Rovnaká metóda je definovaná aj v triede
Svet:F(číslo, desatinné). Metóda má ešte jednu verziu:Svet.F(číslo, šírka, desatinné).Príklad:
doublea =10.335;Svet.vypíšRiadok("Hodnota: ",F(a,2));Výsledok:
Hodnota: 10,34Znak použitý na oddelenie desatinných miest naformátovaného čísla je možné zmeniť volaním metódy
oddeľovačDesatinnejČasti. Použitie znaku na oddelenie tisícov je možné upraviť (vypnúť, zmeniť) volaním metódyoddeľovačTisícov.- Parametre:
číslo– hodnota, ktorá má byť naformátovanádesatinné– počet desatinných miest, ktoré majú byť uvedené vo výslednom (naformátovanom) tvare- Pozri tiež:
Svet.formát,Svet.oddeľovačPrvkovPoľa(String),Svet.oddeľovačDesatinnejČasti(char),Svet.oddeľovačTisícov(Character),Svet.vypíš(Object[]),Svet.F(double, int),Svet.F(double, int, int),F(double, int, int)
-
F
public String F(double číslo, int šírka, int desatinné)
Táto metóda slúži na jednoduché formátovanie reálnych čísiel. Prijíma reálne číslo, potom hodnotu určujúcu šírku výsledného reťazca (počet znakov), na ktorú má byť zarovnaný zľava a nakoniec počet desatinných miest, ktoré majú byť zobrazené. Rovnaká metóda je definovaná aj v triede
Svet:F(číslo, šírka, desatinné). Metóda má ešte jednu verziu:Svet.F(číslo, desatinné).Príklad:
doublea =10.335;Svet.vypíšRiadok("1234567",riadok,F(a,7,2));Výsledok:
123456710,34Znak použitý na oddelenie desatinných miest naformátovaného čísla je možné zmeniť volaním metódy
oddeľovačDesatinnejČasti. Použitie znaku na oddelenie tisícov je možné upraviť (vypnúť, zmeniť) volaním metódyoddeľovačTisícov.- Parametre:
číslo– hodnota, ktorá má byť naformátovanášírka– najmenší počet znakov výsledného naformátovaného reťazca (pri krátkych číslach budú chýbajúce znaky doplnené medzerami)desatinné– počet desatinných miest, ktoré majú byť uvedené vo výslednom (naformátovanom) tvare- Pozri tiež:
Svet.formát,Svet.oddeľovačPrvkovPoľa(String),Svet.oddeľovačDesatinnejČasti(char),Svet.oddeľovačTisícov(Character),Svet.vypíš(Object[]),Svet.F(double, int),Svet.F(double, int, int),F(double, int)
-
S
public String S(Object... argumenty)
Táto metóda slúži na rýchly prevod rôznych objektov do textovej podoby a ich zlúčenie do jedného reťazca. Pri zlučovaní používa rovnaké pravidlá, aké sú opísané v opise metódy
Plátno.vypíš(argumenty). Súvisí to napríklad so spôsobom pridávania medzier medzi reťazce zlučovaných argumentov, automatickým formátovaním čísiel a podobne.Ukážka použitia:
text(S("Skóre:", aktuálneSkóre));- Parametre:
argumenty– zoznam argumentov rôzneho údajového typu oddelený čiarkami- Pozri tiež:
Svet.vypíš(Object[]),Svet.S(Object[])
-
začniCestu
public void začniCestu()
Začne záznam novej cesty robota. Odteraz sa pohyb robota bude zaznamenávať. Zaznamenaná cesta vytvorí oblasť, ktorú je možné kedykoľvek nakresliť, vyplniť alebo obkresliť čiarou. Cesta je použiteľná aj s myšou, pozri
myšVCeste. Táto metóda spustí spôsob záznamu cesty počas ktorého nebude braná do úvahy poloha pera – každá časť cesty bude pridaná tak, ako keby bolo pero položené. Takto je možné vytvoriť cestu v „tichom režime“ a dodatočne ju kompletne vykresliť. Ak chceme zmeniť spôsob záznamu, musíme použiť metódu:začniCestu(boolean rešpektujPolohuPera)alebokresliZáznamCesty(boolean kresli).
-
zacniCestu
public void zacniCestu()
Alias pre začniCestu.
-
začniCestu
public void začniCestu(boolean rešpektujPolohuPera)
Začne záznam novej cesty robota. Odteraz sa pohyb robota bude zaznamenávať. Zaznamenaná cesta vytvorí oblasť, ktorú je možné kedykoľvek nakresliť, vyplniť alebo obkresliť čiarou. Cesta je použiteľná aj s myšou (pozri
myšVCeste).Parameter
rešpektujPolohuPeraurčuje, či má byť počas záznamu cesty braná do úvahy aj poloha pera a výslednú cestu má byť vytvorená z rôznych častí, ktoré smú alebo nesmú byť vykreslené, podľa toho, či bolo počas záznamu cesty pero zdvihnuté alebo položené.Niekedy nie je výhodné brať do úvahy polohu pera. Napríklad ak chceme zaznamenať celú cestu v „tichom režime“ – so zdvihnutým perom a dodatočne ju kompletne vykresliť.
V novších verziách programovacieho rámca je tiež možné využiť novú vlastnosť:
kresliZáznamCesty(boolean kresli).- Parametre:
rešpektujPolohuPera– ak je rovnétrue, záznam cesty bude brať do úvahy polohu pera- Pozri tiež:
začniCestu(),skončiCestu(),zrušCestu(),uzavriCestu(),vyplňCestu(),kresliCestu(),obkresliCestu(),cesta(),kresliZáznamCesty()
-
zacniCestu
public void zacniCestu(boolean rešpektujPolohuPera)
Alias pre začniCestu.
-
skončiCestu
public void skončiCestu()
Ukončí záznam cesty (ak prebieha) a ponechá ho v pamäti na ďalšie použitie. Dokedy opätovne nepoužijeme metódu
začniCestualebo metóduzrušCestu, je zaznamenaná cesta opakovane použiteľná.
-
skonciCestu
public void skonciCestu()
Alias pre skončiCestu.
-
zrušCestu
public void zrušCestu()
Ukončí záznam cesty (ak prebieha) a zmaže zaznamenanú cestu (aj v prípade, že záznam neprebiehal).
-
zrusCestu
public void zrusCestu()
Alias pre zrušCestu.
-
uzavriCestu
public void uzavriCestu()
Ukončí záznam cesty (ak prebieha), uzavrie cestu (prepojí posledný bod posledného kresleného segmentu s prvým bodom cesty) a ponechá záznam cesty na ďalšie použitie. Dokedy opätovne nepoužijeme metódu
začniCestualebo metóduzrušCestu, je zaznamenaná cesta opakovane použiteľná.
-
zavriCestu
public void zavriCestu()
Alias pre uzavriCestu.
-
vyplňCestu
public void vyplňCestu()
Ukončí záznam cesty (ak prebieha) a vyplní plochu, ktorú zaznamenaná cesta vymedzuje aktuálnou farbou robota. Ak záznam neprebiehal a v pamäti jestvuje zaznamenaná cesta, tak robot vyplní plochu podľa nej.
Tip: Ak chcete vytvorenú cestu rotovať alebo posúvať, vytvorte z nej
oblasťa použite metóduvyplňOblasťalebo použite trieduSVGPodpora, ktorá má definované metódy na ľubovoľnú transformáciu tvarov.
-
vyplnCestu
public void vyplnCestu()
Alias pre vyplňCestu.
-
kresliCestu
public void kresliCestu()
Ukončí záznam cesty (ak prebieha) a nakreslí zaznamenanú cestu aktuálnou farbou a hrúbkou čiary. Ak záznam neprebiehal a v pamäti jestvuje zaznamenaná cesta, tak robot nakreslí tú.
Použitie tohto príkazu sa stáva nenahraditeľným napríklad v prípade, že chceme použiť polopriehľadné pero, ktoré pri klasickom kreslení zanecháva v uzlových bodoch pohybu robota prebytočnú farbu. Vtedy je v podstate nevyhnutné zvoliť nasledujúci postup:
- zdvihnúť pero robota,
- začať záznam cesty (spôsobom „rešpektuj polohu pera“),
- vykonať potrebné pohyby robotom
- a použiť túto metódu na nakreslenie výslednej cesty.
Bez ohľadu na uvedený prípad, metóda je použiteľná ľubovoľne. Napríklad ak chceme dráhu robota prekresliť po inom kreslení (čím ju v podstate dostaneme do popredia) a podobne.
Poznámka: Otvorená cesta sa odlišuje od uzavretej. Metódy robota
uzavriCestuaobkresliCestuspôsobujú uzavretie cesty, ostatné metódy spôsobujúce ukončenie záznamu cesty, vrátane tejto, nechávajú cestu otvorenou. V súčasnej verzii programovacieho rámca je možné transformovať, to jest napríklad rotovať alebo posúvať, aj otvorené cesty, a to vďaka novej triedeSVGPodpora, ktorá má definované metódy na ľubovoľnú transformáciu akéhokoľvek tvaru. Uzavretú cestu je možné rotovať a/alebo posúvať i tak, že sa z nej vytvoríoblasťa použije sa metódaobkresliOblasť.
-
obkresliCestu
public void obkresliCestu()
Táto metóda funguje rovnako ako keby sme volali metódy
uzavriCestuakresliCestuza sebou (v uvedenom poradí). To znamená, že cesta sa uzavrie vtedy a len vtedy, ak ešte stále v čase jej volania prebieha záznam cesty, ktorý je súčasne s jej volaním ukončený. Potom je vykreslená výsledná cesta, ale pozor: Ak v čase volania tejto metódy žiadny záznam neprebiehal a v pamäti robota jestvuje skôr zaznamenaná cesta, ktorá je otvorená, tak táto zaznamenaná cesta nie je dodatočne uzatvorená.Tip: Ak chcete vytvorenú cestu rotovať a/alebo posúvať, vytvorte z nej
oblasťa použite metóduobkresliOblasťalebo použite trieduSVGPodpora, ktorá má definované metódy na ľubovoľnú transformáciu tvarov.
-
kresliZáznamCesty
public boolean kresliZáznamCesty()
Overí, či je zapnuté kreslenie priebehu zaznamenávania cesty. Viac informácií obsahuje opis metódy
kresliZáznamCesty(kresli).- Návratová hodnota:
true– kreslenie priebehu záznamu cesty je zapnuté,false– opak- Pozri tiež:
kresliZáznamCesty(boolean),začniCestu(),začniCestu(boolean),skončiCestu(),zrušCestu(),uzavriCestu(),vyplňCestu(),kresliCestu(),obkresliCestu(),cesta()
-
kresliZaznamCesty
public boolean kresliZaznamCesty()
Alias pre kresliZáznamCesty.
-
kresliZáznamCesty
public void kresliZáznamCesty(boolean kresli)
Zapne alebo vypne kreslenie priebehu zaznamenávania cesty. Predvolene je táto vlastnosť zapnutá. V stave vypnutia robot počas záznamu cesty nekreslí žiadne čiary bez ohľadu na polohu pera. Toto sa dá využiť na vytvorenie cesty, ktorá berie do úvahy polohu pera bez toho, aby ju robot priebežne nakreslil.
Príklad:
Povedzme, že máme nasledujúci jednoduchý algoritmus na nakreslenie cikcakového vzoru
vpravo(45);hrúbkaČiary(10);Svet.farbaPozadia(255,255,128);farba(250,0,0,64);doublel =50.0/3.0for(inti =0; i <5; ++i) {dopredu(l);skoč(l);dopredu(l);vpravo(90);dopredu(l);skoč(l);dopredu(l);vľavo(90); }Keď ho nakreslíme polopriehľadnou čiarou bez pomoci cesty, tak v uzlových bodoch bude vzor tmavší (horná časť obrázka nižšie). Keď však použijeme cestu, čiara bude jednoliata (dolná časť obrázka nižšie). Práve na jednoduchšie získanie cesty bez priebehu jej kreslenia slúži metóda
kresliZáznamCesty.
Takto ju môžeme použiť spolu s ostatnými metódami na nakreslenie ľubovoľnej cesty:
začniCestu(true);kresliZáznamCesty(false);// (Tu bude ľubovoľné kreslenie robotom.)kresliCestu();- Parametre:
kresli–true– kreslenie priebehu záznamu cesty bude zapnuté,false– opak- Pozri tiež:
kresliZáznamCesty(),začniCestu(),začniCestu(boolean),skončiCestu(),zrušCestu(),uzavriCestu(),vyplňCestu(),kresliCestu(),obkresliCestu(),cesta()
-
kresliZaznamCesty
public void kresliZaznamCesty(boolean kresli)
Alias pre kresliZáznamCesty.
-
cesta
public Shape cesta()
Ukončí záznam cesty (ak prebieha) a vráti cestu ako tvar. Ak záznam cesty neprebiehal a v pamäti jestvuje skôr zaznamenaná cesta, tak metóda vráti tú.
Metóda je využiteľná (respektíve tvar, ktorý vracia je využiteľný) na tvorbu oblasti, obmedzenie kreslenia, vytvorenie transformovaného tvaru a podobne.Príklad:
V nasledujúcom príklade najskôr zaznamenáme otvorenú cestu v tvare lomenej čiary a túto cestu potom využijeme na nakreslenie útvaru podobného mandale. Namiesto volania metódy
cestaby bolo možné využiť triedu JavyShapena uchovanie objektu cesty, aby bolo vykonávanie príkladu mierne efektívnejšie. Komentáre v príklade ukazujú, ako by sa to dalo docieliť.Na ozrejmenie fungovania príkladu je dôležité poukázať na rozdiel medzi súradnicovým priestorom Javy (predvoleným súradnicovým priestorom, ktorý je používaný v oblasti 2D počítačovej grafiky) a súradnicovým priestorom programovacieho rámca GRobot (ktorý je v podstate štandardným karteziánskym súradnicovým priestorom). Zhňme to v dvoch samostatných bodoch:
- Java predvolene pracuje so súradnicovým systémom, ktorý je bežne používaný v 2D počítačovej grafike. Stred, respektíve počiatok, súradnicovej sústavy (to jest bod so súradnicami [0, 0]) je umiestnený vždy v ľavom hornom rohu zobrazovanej oblasti (buď celej obrazovky, obrázka, plátna, alebo niečoho podobného). Hodnoty na x-ovej, respektíve horizontálnej, osi rastú zľava doprava (to je spoločné pre obidva súradnicové systémy) a hodnoty y-ovej, respektíve vertikálnej, osi rastú zhora nadol (čiže presne opačne než pri klasickom karteziánskom súradnicovom systéme).
- Súradnicový systém programovacieho rámca GRobot má počiatok súradnicovej sústavy v strede plátna a aby sme to skrátili, tak jediným ďalším rozdielom oproti predchádzajúcemu systému je smer rastu hodnôt vertikálnej osi – zospodu nahor (čiže rovnako ako pri klasickom karteziánskom súradnicovom systéme).
Tento rozdiel sa prejavuje aj pri transformáciách triedy
SVGPodpora. V nasledujúcom príklade je na riadku 47 príkaz transformácie otočenia (newTransformácia(Transformácia.OTOČ…), ktorý má posunutý stred otáčania do bodu [200, 200]. Sú to súradnice vyjadrené v súradnicovom systéme Javy. Tento bod v tomto prípade korešponduje so stredom súradnicovej sústavy programovacieho rámca GRobot, ktorý je vždy prepočítavaný podľa aktuálnych rozmerov plátien tak, aby bol v ich strede. Na riadku 14 je volanie nadradeného konštruktora (super(400,400);), ktoré nastavuje rozmery plátien na 400 × 400 bodov a z toho vyplýva, že aktuálny stred súradnicovej sústavy programovacieho rámca je posunutý do bodu [200, 200] súradnicového priestoru Javy.importknižnica.*;importknižnica.SVGPodpora.Transformácia;// Ak by sme sa rozhodli využiť triedu JavyShape, tak takto by sme ju// importovali:// import java.awt.Shape;publicclassTvarZCestyextendsGRobot{// KonštruktorpublicTvarZCesty() {// Nastavenie romerov plátna na 400 × 400 bodov:super(400,400);// Zdvihnutie pera a zahájenie záznamu cesty:zdvihniPero();začniCestu();// „Nakreslenie“ cesty (jej zaznamenanie do vnútornej pamäte robota):dopredu(60);vpravo(60);dopredu(60);vľavo(120);dopredu(60);vpravo(60);dopredu(60);// Ak by sme sa rozhodli využiť triedu Javy Shape,// tak takto by definovali jej inštanciu://Shapecesta =cesta();// Úprava hrúbky čiary:hrúbkaČiary(2.5);// Kreslenie transformovanej cesty:for(inti =0; i <12; ++i) {náhodnáFarba();// Ak by sme sa rozhodli využiť triedu Javy Shape, tak na// nasledujúcom riadku by nebolo volanie metódy „cesta(),“ ale// použitie inštancie triedy Shape: „cesta“ (zjednodušene// povedané by bolo treba zmazať zátvorky za identifikátorom// „cesta“):podlaha.kresli(SVGPodpora.dajVýsledný(cesta(),newTransformácia(Transformácia.OTOČ, i *30.0,200.0,200.0))); } }// Hlavná metóda.publicstaticvoidmain(String... args) {Svet.použiKonfiguráciu("tvar-z-cesty.cfg");newTvarZCesty(); } }Výsledok:
Dve ukážky možných výsledkov kreslenia príkladu.
- Pozri tiež:
začniCestu(),začniCestu(boolean),skončiCestu(),zrušCestu(),uzavriCestu(),vyplňCestu(),kresliCestu(),obkresliCestu(),kružnica(double),kruh(double),elipsa(double, double),kresliElipsu(double, double),vyplňElipsu(double, double),štvorec(double),kresliŠtvorec(double),vyplňŠtvorec(double),obdĺžnik(double, double),kresliObdĺžnik(double, double),vyplňObdĺžnik(double, double),hviezda(double),kresliHviezdu(double),vyplňHviezdu(double),kružnica(),kruh(),elipsa(double),kresliElipsu(double),vyplňElipsu(double),štvorec(),kresliŠtvorec(),vyplňŠtvorec(),obdĺžnik(double),kresliObdĺžnik(double),vyplňObdĺžnik(double),hviezda(),kresliHviezdu(),vyplňHviezdu(),text(String),text(String, int)
-
myšVCeste
public boolean myšVCeste()
Zistí, či sa aktuálne súradnice myši nachádzajú v uzavretej oblasti cesty, ktorá bola zaznamenaná kreslením aktuálneho robota od posledného použitia metódy
začniCestu. Cesta je zaznamenávaná až do použitia metódskončiCestu,zrušCestu,vyplňCestualebokresliCestu. Dokedy opätovne nepoužijeme metóduzačniCestualebo metóduzrušCestu, je zaznamenaná cesta opakovane použiteľná.- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
myšVElipse(double, double),myšVKruhu(double),myšVPôsobisku(),myšVoŠtvorci(double),myšVObdĺžniku(double, double),myšVHviezde(double),myšVOblasti(Area)
-
mysVCeste
public boolean mysVCeste()
Alias pre myšVCeste.
-
bodVCeste
public boolean bodVCeste(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa aktuálne súradnice zadaného bodu nachádzajú v uzavretej oblasti cesty, ktorá bola zaznamenaná kreslením aktuálneho robota od posledného použitia metódy
začniCestu. Cesta je zaznamenávaná až do použitia metódskončiCestu,zrušCestu,vyplňCestualebokresliCestu. Dokedy opätovne nepoužijeme metóduzačniCestualebo metóduzrušCestu, je zaznamenaná cesta opakovane použiteľná. Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:bodVCeste(Poloha objekt).- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
bodVPôsobisku(double, double),bodVKruhu(double, double, double),bodVElipse(double, double, double, double),bodVoŠtvorci(double, double, double),bodVObdĺžniku(double, double, double, double),bodVHviezde(double, double, double),bodVOblasti(double, double, Area),bodVTvare(double, double, Shape)
-
bodVCeste
public boolean bodVCeste(Poloha objekt)
Funguje rovnako ako metóda
bodVCeste(x, y), len namiesto súradníc bodu je použitá poloha zadaného objektu…- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc bodu- Návratová hodnota:
true/false- Pozri tiež:
bodVPôsobisku(Poloha),bodVKruhu(Poloha, double),bodVElipse(Poloha, double, double),bodVoŠtvorci(Poloha, double),bodVObdĺžniku(Poloha, double, double),bodVHviezde(Poloha, double),bodVOblasti(Poloha, Area),bodVTvare(Poloha, Shape)
-
zamestnaj
public void zamestnaj(Oblasť oblasť)
Zamestná tento robot na účely tvorby, prípadne kreslenia, zadanej oblasti. Má rovnaký efekt ako volanie metódy
oblasť.zamestnaj(robot). Od okamihu zamestnania stráca robot dočasne svoje schopnosti kreslenia útvarov a písania textov. Je to z dôvodu ich presunutia do tvorby oblasti. Zamestnaný robot nekreslí útvary ani nie je schopný písať texty dovtedy, kým nie je zo služby uvoľnený (prepustený).Robot nesmie byť zamestnaný pre inú oblasť, lebo vznikne výnimka.
- Parametre:
oblasť– objekt typuOblasť- Výnimky:
GRobotException– ak je robot zamestnaný pre inú oblasť- Pozri tiež:
uvoľni(Oblasť),uvoľni(),zamestnaný(),zamestnaný(Oblasť)
-
uvoľni
public void uvoľni(Oblasť oblasť)
Uvoľní tento robot z úloh tvorby (prípadne kreslenia) zadanej oblasti. Má rovnaký efekt ako volanie metódy
oblasť.uvoľni(robot). Ak tento robot nebol zamestnaný pre zadanú oblasť, tak nemá volanie metódy žiadny efekt.Poznámka: Názov
uvoľnimá v programovacom rámci GRobot deväť rôznych metód:GRobot.uvoľni(),GRobot.uvoľni(Oblasť),Oblasť.uvoľni(),Oblasť.uvoľni(GRobot)– slúžia na uvoľnenie robota zo zamestnania pre stanovenú oblasť (čo je geometrická trieda),Svet.uvoľni()– slúži na uvoľnenie hlavného okna sveta, t. j. umožnenie zmeny veľkosti okna používateľovi (ide o opak metódySvet.upevni) a nakoniecSvet.uvoľni(GRobot),Svet.uvoľni(Class),Svet.uvoľni(Plazma)Svet.uvoľni(Obrázok)aSvet.uvoľni(String)– slúžia na uvoľňovanie nepotrebných inštancií robotov, vytvorených alebo prečítaných obrázkov a prečítaných zvukov z vnútorných zoznamov zdrojov (robotov, obrázkov, zvukov), čo je jednak nevyhnutnou podmienkou ich úspešného vymazania z pamäte zberačom odpadkov Javy a jednak to môže byť niekedy potrebné (napríklad ak sa obsah súboru so zdrojom uloženým na disku zmenil).- Parametre:
oblasť– objekt typuOblasť- Pozri tiež:
zamestnaj(Oblasť),uvoľni(),zamestnaný(),zamestnaný(Oblasť)
-
uvoľni
public void uvoľni()
Automaticky uvoľní robot z úloh tvorby (prípadne kreslenia) oblasti. Má podobný efekt ako volanie metódy
oblasť.uvoľni(). Ak robot nebol zamestnaný pre žiadnu oblasť, tak nemá volanie metódy žiadny efekt.Poznámka: Názov
uvoľnimá v programovacom rámci GRobot deväť rôznych metód:GRobot.uvoľni(),GRobot.uvoľni(Oblasť),Oblasť.uvoľni(),Oblasť.uvoľni(GRobot)– slúžia na uvoľnenie robota zo zamestnania pre stanovenú oblasť (čo je geometrická trieda),Svet.uvoľni()– slúži na uvoľnenie hlavného okna sveta, t. j. umožnenie zmeny veľkosti okna používateľovi (ide o opak metódySvet.upevni) a nakoniecSvet.uvoľni(GRobot),Svet.uvoľni(Class),Svet.uvoľni(Plazma)Svet.uvoľni(Obrázok)aSvet.uvoľni(String)– slúžia na uvoľňovanie nepotrebných inštancií robotov, vytvorených alebo prečítaných obrázkov a prečítaných zvukov z vnútorných zoznamov zdrojov (robotov, obrázkov, zvukov), čo je jednak nevyhnutnou podmienkou ich úspešného vymazania z pamäte zberačom odpadkov Javy a jednak to môže byť niekedy potrebné (napríklad ak sa obsah súboru so zdrojom uloženým na disku zmenil).- Pozri tiež:
zamestnaj(Oblasť),uvoľni(Oblasť),zamestnaný(),zamestnaný(Oblasť)
-
uvolni
public void uvolni()
Alias pre uvoľni.
-
prepusti
public void prepusti()
Alias pre uvoľni.
-
zamestnaný
public boolean zamestnaný()
Overí, či je tento robot zamestnaný pre potreby niektorej oblasti.
- Návratová hodnota:
true/false- Pozri tiež:
zamestnaj(Oblasť),uvoľni(Oblasť),uvoľni(),zamestnaný(Oblasť)
-
zamestnany
public boolean zamestnany()
Alias pre zamestnaný.
-
zamestnaný
public boolean zamestnaný(Oblasť oblasť)
Overí, či je tento robot zamestnaný pre potreby určenej oblasti.
- Parametre:
oblasť– cieľová oblasť- Návratová hodnota:
true/false- Pozri tiež:
zamestnaj(Oblasť),uvoľni(Oblasť),uvoľni(),zamestnaný()
-
zamestnany
public boolean zamestnany(Oblasť oblasť)
Alias pre zamestnaný.
-
obkresliOblasť
public void obkresliOblasť(Area oblasť)
Obkreslí zadanú oblasť hrúbkou a farbou čiary nastavenou pre tento robot. Oblasť rotuje podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť) a posunie o súradnice robota na plátne (stred sa nachádza v bode [0, 0] – v strede plátna; ak je robot v strede plátna, poloha oblasti sa nezmení).
Metóda berie do úvahy aj aktuálnu mierku robota.
- Parametre:
oblasť– objekt typuArea(resp.Oblasť)- Pozri tiež:
Oblasť.kresli(),Oblasť.kresli(GRobot)
-
obkresliOblast
public void obkresliOblast(Area oblasť)
Alias pre obkresliOblasť.
-
vyplňOblasť
public void vyplňOblasť(Area oblasť)
Vyplní plochu zadanej oblasti farbou nastavenou pre tento robot, pričom vypĺňanú oblasť rotuje podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť) a posúva ju o súradnice robota na plátne (stred sa nachádza v bode [0, 0] – v strede plátna; ak je robot v strede plátna, poloha oblasti sa nezmení).
Metóda berie do úvahy aj aktuálnu mierku robota.
- Parametre:
oblasť– objekt typuArea(resp.Oblasť)- Pozri tiež:
Oblasť.vyplň(),Oblasť.vyplň(GRobot)
-
vyplnOblast
public void vyplnOblast(Area oblasť)
Alias pre vyplňOblasť.
-
vyplňOblasť
public void vyplňOblasť(Area oblasť, String súbor)
Vyplní plochu zadanej oblasti zadanou textúrou, pričom oblasť rotuje podľa smeru[1] robota a posúva ju o súradnice[2] robota na plátne. Rotácia a poloha textúry nie sú nijako ovplyvňované polohou a smerom robota. Textúra je zadaná ako názov súboru s obrázkom, ktorý bude použitý na dlaždicové vyplnenie plochy oblasti.
[1] – za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť.
[2] – stred sa nachádza v bode [0, 0] – v strede plátna; ak je robot v strede plátna, poloha oblasti sa nezmení.Metóda berie do úvahy aj aktuálnu mierku robota.
Obrázok prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)Poznámka: Parametre textúry sa dajú ovplyvňovať špeciálnymi príkazmi. Súvisí s nimi i predvolené správanie príkazov vypĺňania. Predvolený bod začiatku vypĺňania dlaždicami sa nachádza v strede plátna alebo vypĺňaného obrázka. Pozrite si aj opis metódy
posunutieVýplne, kde nájdete príklad použitia a odkazy na metódy upravujúce ďalšie parametre obrázkových výplní.- Parametre:
oblasť– objekt typuArea(resp.Oblasť)súbor– názov súboru s obrázkom textúry- Výnimky:
GRobotException– ak súbor s obrázkom nebol nájdený- Pozri tiež:
Svet.priečinokObrázkov(),Svet.priečinokObrázkov(String),Oblasť.vyplň(String),Oblasť.vyplň(GRobot, String)
-
vyplnOblast
public void vyplnOblast(Area oblasť, String súbor)
Alias pre vyplňOblasť.
-
vyplňOblasť
public void vyplňOblasť(Area oblasť, Image výplň)
Vyplní plochu zadanej oblasti zadanou textúrou, pričom oblasť rotuje podľa smeru[1] robota a posúva ju o súradnice[2] robota na plátne. Rotácia a poloha textúry nie sú nijako ovplyvňované polohou a smerom robota. Textúra bude použitá na dlaždicové vyplnenie plochy oblasti. Je zadaná ako objekt typu
Image, za ktorý môže byť dosadený aj objekt typuObrázok.[1] – za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť.
[2] – stred sa nachádza v bode [0, 0] – v strede plátna; ak je robot v strede plátna, poloha oblasti sa nezmení.Metóda berie do úvahy aj aktuálnu mierku robota.
Poznámka: Parametre textúry sa dajú ovplyvňovať špeciálnymi príkazmi. Súvisí s nimi i predvolené správanie príkazov vypĺňania. Predvolený bod začiatku vypĺňania dlaždicami sa nachádza v strede plátna alebo vypĺňaného obrázka. Pozrite si aj opis metódy
posunutieVýplne, kde nájdete príklad použitia a odkazy na metódy upravujúce ďalšie parametre obrázkových výplní.- Parametre:
oblasť– objekt typuArea(resp.Oblasť)výplň– obrázok textúry- Pozri tiež:
Oblasť.vyplň(Image),Oblasť.vyplň(GRobot, Image)
-
vyplnOblast
public void vyplnOblast(Area oblasť, Image výplň)
Alias pre vyplňOblasť.
-
bodVOblasti
public boolean bodVOblasti(double súradnicaBoduX, double súradnicaBoduY, Area oblasť)Zistí, či sa súradnice zadaného bodu nachádzajú v zadanej oblasti, ktorá je na účely porovnania rotovaná podľa smeru robota (za východisko je považovaných 90°; odchýlka v kladom alebo zápornom smere náležite rotuje oblasť) a posunutá o súradnice robota na plátne (stred sa nachádza v bode [0, 0] – v strede plátna; ak je robot v strede plátna, poloha oblasti sa nezmení). Nasledujúca metóda dovoľuje namiesto súradníc bodu použiť objekt:
bodVOblasti(Poloha objekt, Area oblasť).Metóda berie do úvahy aj aktuálnu mierku robota.
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica boduoblasť– oblasť, ktorá má byť použitá na overenie- Návratová hodnota:
true– áno;false– nie- Pozri tiež:
Oblasť.bodV(double, double),bodVPôsobisku(double, double),bodVKruhu(double, double, double),bodVElipse(double, double, double, double),bodVoŠtvorci(double, double, double),bodVObdĺžniku(double, double, double, double),bodVHviezde(double, double, double),bodVCeste(double, double),bodVTvare(double, double, Shape)
-
bodVOblasti
public boolean bodVOblasti(Poloha objekt, Area oblasť)
Funguje rovnako ako metóda
bodVOblasti(x, y, oblasť), len namiesto súradníc bodu je použitá poloha zadaného objektu…Metóda berie do úvahy aj aktuálnu mierku robota.
- Parametre:
objekt– objekt, ktorého poloha je použitá namiesto súradníc boduoblasť– oblasť, ktorá má byť použitá na overenie- Návratová hodnota:
true/false- Pozri tiež:
Oblasť.bodV(Poloha),bodVPôsobisku(Poloha),bodVKruhu(Poloha, double),bodVElipse(Poloha, double, double),bodVoŠtvorci(Poloha, double),bodVObdĺžniku(Poloha, double, double),bodVHviezde(Poloha, double),bodVCeste(Poloha),bodVTvare(Poloha, Shape)
-
vrstva
public void vrstva(int vrstva)
Preradí tento robot do vrstvy
s určeným poradovým číslom. Vrstva môže byť chápaná ako
symbolická hodnota, ktorá ovplyvňuje poradie kreslenia
robotov (podrobnosti sú v opise metódy vrstva()). Zmenou hodnoty vrstvy sa nezmení umiestnenie robota v rámci vnútorného zoznamu robotov. Vrstva ovplyvňuje poradie kreslenia v rámci všetkých robotov, pričom poradie kreslenia robotov umiestnených v rovnakej vrstve je určené poradím vo vnútornom zozname robotov.- Parametre:
vrstva– poradové číslo vrstvy kreslenia, do ktorej má byť tento robot premiestnený
-
vrstva
public int vrstva()
Vráti poradové číslo vrstvy kreslenia,
v ktorej je umiestnený tento robot.
Predvolené číslo vrstvy je 0. Stúpajúca hodnota čísla vrstvy znamená neskoršie kreslenie, čiže „zobrazenie (robota, resp. ním reprezentovaného objektu) viac v popredí.“ Ešte raz v skratke: Robot s vyšším číslom vrstvy bude nakreslený neskôr, čo znamená, že bude vizuálne prekrývať roboty s nižšími číslami vrstiev. (Čísla vrstiev môžu byť aj záporné.)Príklad:
Desať robotov v kruhu je po spustení kreslených v tom poradí, ako boli vytvorené. Kliknutie ľavým tlačidlom myši „priblíži“ robot (presunie ho do vyššej vrstvy) a kliknutie iným (predpokladajme, že pravým, ale môže to byť aj stredné) tlačidlom vykoná opak.
importknižnica.*;publicclassVrstvyextendsGRobot{publicclassTrojzubecextendsGRobot{publicTrojzubec(doubleuhol) {// Nastavenie vlastností (odvodeného) robota.uhol(uhol);veľkosť(60);preskočVpravo(120);hrúbkaČiary(2); }@OverridepublicvoidkresliSeba() {// Kreslenie tvaru:farba(svetlošedá);kružnica();farba(modrá);vypĺňajTvary();trojzubec();farba(žltá);nevypĺňajTvary();trojzubec();farba(svetlozelená);text(""+vrstva()); }@Overridepublicvoidklik() {// Klik ľavým tlačidlom posunie robota do vyššej vrstvy (do// popredia) a klik ľavým naopak. Roboty v rovnakých vrstvách// sú kreslení buď podľa poradia, v ktorom boli vytvorení, alebo// podľa upraveného poradia (pozri napríklad medódy: naVrch,// naSpodok, vyššie, nižšie…).if(myšV()) {if(ÚdajeUdalostí.tlačidloMyši(ĽAVÉ))vrstva(vrstva() +1);elsevrstva(vrstva() –1); } } }privateVrstvy() {// Konštruktor nadradenej triedy (GRobot) upraví veľkosť plátna.// (Toto je použiteľné len pri hlavnom robote.)super(400,400);skry();// Vytvorenie desiatich robotov (zoradených za sebou na kružnici).for(inti =0; i <360; i +=36)newTrojzubec(i); }// Hlavná metóda. (Vstupný bod programu.)publicstaticvoidmain(String... args) {newVrstvy(); } }Výsledok:
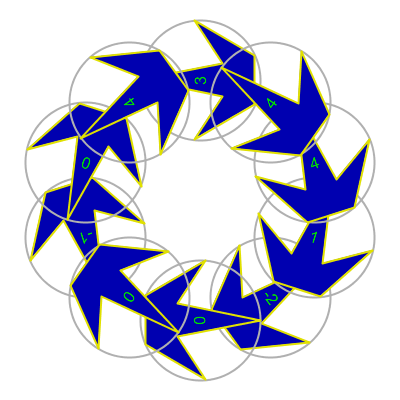
Vzhľad príkladu s vrstvami.- Návratová hodnota:
- celé číslo určujúce poradové číslo vrstvy kreslenia pre tento robot
-
naVrch
public void naVrch()
Presunie tento robot do popredia s ohľadom na umiestnenie robotov do vrstiev. Technicky to znamená, že robot bude umiestnený na koniec vnútorného zoznamu robotov. Poradie umiestnenia robotov v tomto zozname ovplyvňuje poradie kreslenia robotov nachádzajúcich sa v spoločnej vrstve. Pri štandardnom spracovaní pomocou výzvy treba počítať s tým, že tento robot bude odteraz vyzývaný ako posledný (bez ohľadu na umiestnenie do vrstiev).
- Pozri tiež:
naSpodok(),vyššie(),nižšie(),pred(GRobot),za(GRobot),jePred(GRobot),jeZa(GRobot)
-
naSpodok
public void naSpodok()
Presunie tento robot do pozadia s ohľadom na umiestnenie robotov do vrstiev. Technicky to znamená, že robot bude umiestnený na začiatok vnútorného zoznamu robotov. Poradie umiestnenia robotov v tomto zozname ovplyvňuje poradie kreslenia robotov nachádzajúcich sa v spoločnej vrstve. Pri štandardnom spracovaní pomocou výzvy treba počítať s tým, že tento robot bude odteraz vyzývaný ako prvý (bez ohľadu na umiestnenie do vrstiev).
- Pozri tiež:
naVrch(),vyššie(),nižšie(),pred(GRobot),za(GRobot),jePred(GRobot),jeZa(GRobot)
-
vyššie
public void vyššie()
Presunie tento robot o úroveň vyššie v rámci poradia kreslenia robotov s ohľadom na umiestnenie robotov do vrstiev. Technicky to znamená to, že robot bude umiestnený o jeden prvok ďalej v rámci vnútorného zoznamu robotov. Poradie umiestnenia robotov v tomto zozname ovplyvňuje poradie kreslenia robotov nachádzajúcich sa v spoločnej vrstve. Pri štandardnom spracovaní pomocou výzvy to bude znamenať, že tento robot bude odteraz vyzývaný o niečo neskôr (poradie vyzývania nesúvisí s umiestnením robotov do vrstiev).
- Pozri tiež:
naVrch(),naSpodok(),nižšie(),pred(GRobot),za(GRobot),jePred(GRobot),jeZa(GRobot)
-
vyssie
public void vyssie()
Alias pre vyššie.
-
nižšie
public void nižšie()
Presunie tento robot o úroveň nižšie v rámci poradia kreslenia robotov s ohľadom na umiestnenie robotov do vrstiev. Technicky to znamená to, že robot bude umiestnený o jeden prvok skôr v rámci vnútorného zoznamu robotov. Poradie umiestnenia robotov v tomto zozname ovplyvňuje poradie kreslenia robotov nachádzajúcich sa v spoločnej vrstve. Pri štandardnom spracovaní pomocou výzvy to bude znamenať, že tento robot bude odteraz vyzývaný o niečo skôr (poradie vyzývania nesúvisí s umiestnením robotov do vrstiev).
- Pozri tiež:
naVrch(),naSpodok(),vyššie(),pred(GRobot),za(GRobot),somPred(GRobot),somZa(GRobot)
-
nizsie
public void nizsie()
Alias pre nižšie.
-
pred
public void pred(GRobot ktorého)
Presunie tento robot pred zadaný robot (z pohľadu zoradenia robotov vo vnútornom zozname, pričom umiestnenie robotov do vrstiev zostane neovplyvnené). Technicky to znamená, že tento robot bude vo vnútornom zozname robotov umiestnený „za“ zadaný robot, to jest – jeho poradové číslo v zozname robotov bude vyššie. Poradie umiestnenia robotov v tomto zozname ovplyvňuje poradie kreslenia robotov nachádzajúcich sa v spoločnej vrstve, pričom roboty s nižším poradovým číslom sú kreslené skôr, preto sú v rámci jednej vrstvy zobrazené pod svojími rovesníkmi. Pri štandardnom spracovaní pomocou výzvy bude tento robot odteraz vyzývaný tesne po zadanom robote (poradie vyzývania nesúvisí s umiestnením robotov do vrstiev).
- Parametre:
ktorého– robot, pred ktorého má byť tento robot posunutý- Pozri tiež:
naVrch(),naSpodok(),vyššie(),nižšie(),za(GRobot),somPred(GRobot),somZa(GRobot)
-
za
public void za(GRobot ktorého)
Presunie tento robot za zadaný robot (z pohľadu zoradenia robotov vo vnútornom zozname robotov, pričom umiestnenie robotov do vrstiev zostane neovplyvnené). Technicky to znamená, že tento robot bude vo vnútornom zozname robotov umiestnený „pred“ zadaný robot, to jest – jeho poradové číslo v zozname robotov bude nižšie. Poradie umiestnenia robotov v tomto zozname ovplyvňuje poradie kreslenia robotov nachádzajúcich sa v spoločnej vrstve, pričom roboty s nižším poradovým číslom sú kreslené skôr, preto sú v rámci jednej vrstvy zobrazené pod svojími rovesníkmi. Pri štandardnom spracovaní pomocou výzvy bude tento robot odteraz vyzývaný skôr, než zadaný robot (poradie vyzývania nesúvisí s umiestnením robotov do vrstiev).
- Parametre:
ktorého– robot, za ktorého má byť tento robot umiestnený- Pozri tiež:
naVrch(),naSpodok(),vyššie(),nižšie(),pred(GRobot),za(GRobot),somPred(GRobot),somZa(GRobot)
-
somPred
public boolean somPred(GRobot ktorým)
Overí, či je tento robot pred zadaným robotom. S ohľadom na umiestnenie robotov do vrstiev to nemusí nevyhnutne znamenať, že tento robot bude skutočne nakreslený pred zadaným robotom. Ak chcete overiť skutočné poradie zobrazovania, porovnajte najskôr hodnoty umiestnenia robotov vo vrstvách. Metóda vráti
truepre všetkých robotov, ktorí sú technicky umiestnení za týmto robotom (to znamená, že sú vo vnútornom zozname robotov na pozícii s nižším poradovým číslom). Metóda berie do úvahy aj skrytých robotov.- Parametre:
ktorým– robot, voči ktorému má byť overená poloha tohto robota- Návratová hodnota:
trueak je tento robot umiestnený nad určeným robotom, inakfalse- Pozri tiež:
naVrch(),naSpodok(),vyššie(),nižšie(),pred(GRobot),za(GRobot),somZa(GRobot)
-
somZa
public boolean somZa(GRobot ktorým)
Overí, či je tento robot za zadaným robotom. S ohľadom na umiestnenie robotov do vrstiev to nemusí nevyhnutne znamenať, že tento robot bude skutočne nakreslený za zadaným robotom. Ak chcete overiť skutočné poradie zobrazovania, porovnajte najskôr hodnoty umiestnenia robotov vo vrstvách. Metóda vráti
truepre všetky roboty, ktoré sú technicky umiestnené pred týmto robotom (to znamená, že sú vo vnútornom zozname robotov na pozícii s vyšším poradovým číslom). Metóda berie do úvahy aj skryté roboty.- Parametre:
ktorým– robot, voči ktorému má byť overená poloha tohto robota- Návratová hodnota:
trueak je tento robot umiestnený pod určeným robotom, inakfalse- Pozri tiež:
naVrch(),naSpodok(),vyššie(),nižšie(),pred(GRobot),za(GRobot),somPred(GRobot)
-
dajSpojnicu
public GRobot.Spojnica dajSpojnicu(GRobot cieľ)
Vráti inštanciu jestvujúcej spojnice medzi týmto a zadaným robotom alebo vráti hodnotu
null, ak spojnica nejestvuje.- Parametre:
cieľ– partnerský (cieľový) robot medzi ktorým má byť hľadaná jestvujúca spojnica- Návratová hodnota:
- jestvujúca inštancia spojnice
alebo
null - Pozri tiež:
spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot),spojniceZ(),spojniceDo(),súSpojniceZ(),súSpojniceDo()
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať aktuálnu farbu a hrúbku (aj typ) čiary tohto robota, ak spojnica medzi týmto a zadaným robotom jestvuje, jej farba a hrúbka (aj typ) čiary sa aktualizujú podľa zdrojového robota. (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnica- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, double hrúbka)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadanú hrúbku čiary a aktuálnu farbu tohto robota (typ čiary bude predvolený – súvislá čiara). Ak spojnica jestvuje, hrúbka čiary sa aktualizuje zadanou hodnotou (typ bude opäť predvolený – súvislá čiara) a farba sa aktualizuje podľa aktuálnej farby tohto robota. (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.Poznámka: V tomto prípade je povolené zadávať zápornú hodnotu hrúbky čiary, ktorá značí automatický štýl čiary spojnice určený podľa aktuálneho štýlu čiary zdrojového robota.
- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicahrúbka– hrúbka čiary spojnice- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Výnimky:
GRobotException– ak je hrúbka čiary záporná- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Color farba)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadanú farbu čiary a hrúbku (aj typ) čiary podľa aktuálneho nastavenia tohto robota. Ak spojnica jestvuje, jej farba sa aktualizuje zadanou hodnotou a hrúbka čiary sa aktualizuje podľa aktuálnej hrúbky (a typu) čiary tohto robota. (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.Poznámka: Namiesto konkrétnej farby je povolené zadať aj hodnotu
null, ktorá signalizuje automatickú farbu podľa aktuálnej hodnoty zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicafarba– farba čiary spojnice (argument musí byť objekt typuColoralebo potomok)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, double hrúbka, Color farba)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadanú hrúbku a farbu čiary (typ čiary bude predvolený – súvislá čiara). Ak spojnica jestvuje, hrúbka a farba čiary sa aktualizujú zadanými hodnotami (typ bude opäť predvolený – súvislá čiara). (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.Poznámka: V tomto prípade je povolené zadávať zápornú hodnotu hrúbky čiary a hodnotu
nullnamiesto konkrétnej farby, čo značí automatické hodnoty podľa aktuálnych vlastností zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicahrúbka– hrúbka čiary spojnicefarba– farba čiary spojnice (argument musí byť objekt typuColoralebo potomok)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Výnimky:
GRobotException– ak je hrúbka čiary záporná- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Farebnosť objekt)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať farbu čiary určenú zadaným objektom a hrúbku (aj typ) čiary podľa aktuálneho nastavenia tohto robota. Ak spojnica jestvuje, jej farba sa aktualizuje podľa farby zadaného objektu a hrúbka (aj typ) čiary sa aktualizuje podľa aktuálnej hrúbky čiary tohto robota. (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.Poznámka: Namiesto konkrétnej farby je povolené zadať aj hodnotu
null, ktorá signalizuje automatickú farbu podľa aktuálnej hodnoty zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicaobjekt– objekt, podľa ktorého bude určená farba čiary spojnice- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, double, Color),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, double hrúbka, Farebnosť objekt)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadanú hrúbku a farbu čiary podľa zadaného objektu (typ čiary bude predvolený – súvislá čiara). Ak spojnica jestvuje, hrúbka čiary sa aktualizuje zadanou hodnotou a farba sa aktualizuje podľa farby zadaného objektu (typ čiary bude opäť predvolený – súvislá čiara). (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.Poznámka: V tomto prípade je povolené zadávať zápornú hodnotu hrúbky čiary a hodnotu
nullnamiesto konkrétnej inštancie farebnosti, čo značí automatické hodnoty podľa aktuálnych vlastností zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicahrúbka– hrúbka čiary spojniceobjekt– objekt, podľa ktorého sa určí farba čiary spojnice- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Výnimky:
GRobotException– ak je hrúbka čiary záporná- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Stroke čiara)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadaný typ čiary a aktuálnu farbu tohto robota. Ak spojnica jestvuje, typ čiary sa aktualizuje podľa zadaného objektu a farba sa aktualizuje podľa aktuálnej farby tohto robota. (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.Poznámka: Namiesto konkrétneho štýlu čiary je povolené zadať aj hodnotu
null, čo značí automatický štýl čiary spojnice určený podľa aktuálneho štýlu čiary zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicačiara– objekt určujúci typ čiary spojnice- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Stroke čiara, Color farba)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadaný typ a farbu čiary. Ak spojnica jestvuje, typ a farba čiary sa aktualizujú zadanými hodnotami. (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.Poznámka: Namiesto konkrétneho štýlu čiary alebo farby je povolené zadať aj hodnotu
null, čo značí automatické hodnoty podľa aktuálnych vlastností zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicačiara– objekt určujúci typ čiary spojnicefarba– farba čiary spojnice (argument musí byť objekt typuColoralebo potomok)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Stroke čiara, Farebnosť objekt)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať typ a farbu čiary podľa zadaných objektov. Ak spojnica jestvuje, typ a farba čiary sa aktualizujú podľa zadaných objektov. (Ide o spojnicu smerujúcu od tohto robota.) Všetky verzie metódy
spojnica, ktoré neobsahujú parametreorezanieZačiatkuaorezanieKoncarušia oblasti orezania začiatku a konca spojnice.Poznámka: Namiesto konkrétneho štýlu čiary alebo inštancie farebnosti je povolené zadať aj hodnotu
null, čo značí automatické hodnoty podľa aktuálnych vlastností zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicačiara– objekt určujúci typ čiary spojniceobjekt– objekt, podľa ktorého sa určí farba čiary spojnice- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať aktuálnu farbu a hrúbku (aj typ) čiary tohto robota, ak spojnica medzi týmto a zadaným robotom jestvuje, jej farba a hrúbka (aj typ) čiary sa aktualizujú podľa zdrojového robota. (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicaorezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, double hrúbka, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadanú hrúbku čiary a aktuálnu farbu tohto robota (typ čiary bude predvolený – súvislá čiara). Ak spojnica jestvuje, hrúbka čiary sa aktualizuje zadanou hodnotou (typ bude opäť predvolený – súvislá čiara) a farba sa aktualizuje podľa aktuálnej farby tohto robota. (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.Poznámka: V tomto prípade je povolené zadávať zápornú hodnotu hrúbky čiary, čo značí automatický štýl čiary spojnice určený podľa aktuálneho štýlu čiary zdrojového robota.
- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicahrúbka– hrúbka čiary spojniceorezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Výnimky:
GRobotException– ak je hrúbka čiary záporná- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Color farba, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadanú farbu čiary a hrúbku (aj typ) čiary podľa aktuálneho nastavenia tohto robota. Ak spojnica jestvuje, jej farba sa aktualizuje zadanou hodnotou a hrúbka čiary sa aktualizuje podľa aktuálnej hrúbky (a typu) čiary tohto robota. (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.Poznámka: Namiesto konkrétnej farby je povolené zadať aj hodnotu
null, ktorá signalizuje automatickú farbu podľa aktuálnej hodnoty zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicafarba– farba čiary spojnice (argument musí byť objekt typuColoralebo potomok)orezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, double hrúbka, Color farba, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadanú hrúbku a farbu čiary (typ čiary bude predvolený – súvislá čiara). Ak spojnica jestvuje, hrúbka a farba čiary sa aktualizujú zadanými hodnotami (typ bude opäť predvolený – súvislá čiara). (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.Poznámka: V tomto prípade je povolené zadávať zápornú hodnotu hrúbky čiary a hodnotu
nullnamiesto konkrétnej farby, čo značí automatické hodnoty podľa aktuálnych vlastností zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicahrúbka– hrúbka čiary spojnicefarba– farba čiary spojnice (argument musí byť objekt typuColoralebo potomok)orezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Výnimky:
GRobotException– ak je hrúbka čiary záporná- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Farebnosť objekt, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať farbu čiary určenú zadaným objektom a hrúbku (aj typ) čiary podľa aktuálneho nastavenia tohto robota. Ak spojnica jestvuje, jej farba sa aktualizuje podľa farby zadaného objektu a hrúbka (aj typ) čiary sa aktualizuje podľa aktuálnej hrúbky čiary tohto robota. (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.Poznámka: Namiesto konkrétneho objektu farebnosti je povolené zadať hodnotu
null, čo značí automatickú farbu podľa aktuálnej hodnoty zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicaobjekt– objekt, podľa ktorého bude určená farba čiary spojniceorezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, double hrúbka, Farebnosť objekt, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadanú hrúbku a farbu čiary podľa zadaného objektu (typ čiary bude predvolený – súvislá čiara). Ak spojnica jestvuje, hrúbka čiary sa aktualizuje zadanou hodnotou a farba sa aktualizuje podľa farby zadaného objektu (typ čiary bude opäť predvolený – súvislá čiara). (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.Poznámka: V tomto prípade je povolené zadávať zápornú hodnotu hrúbky čiary a hodnotu
nullnamiesto konkrétnej inštancie farebnosti, čo značí automatické hodnoty podľa aktuálnych vlastností zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicahrúbka– hrúbka čiary spojniceobjekt– objekt, podľa ktorého sa určí farba čiary spojniceorezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Výnimky:
GRobotException– ak je hrúbka čiary záporná- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Stroke čiara, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadaný typ čiary a aktuálnu farbu tohto robota. Ak spojnica jestvuje, typ čiary sa aktualizuje podľa zadaného objektu a farba sa aktualizuje podľa aktuálnej farby tohto robota. (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.Poznámka: Namiesto konkrétneho štýlu čiary je povolené zadať hodnotu
null, čo značí automatický štýl čiary spojnice určený podľa aktuálneho štýlu čiary zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicačiara– objekt určujúci typ čiary spojniceorezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Stroke čiara, Color farba, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať zadaný typ a farbu čiary. Ak spojnica jestvuje, typ a farba čiary sa aktualizujú zadanými hodnotami. (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.Poznámka: Namiesto konkrétneho štýlu čiary alebo farby je povolené zadať hodnotu
null, čo značí automatické hodnoty podľa aktuálnych vlastností zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicačiara– objekt určujúci typ čiary spojnicefarba– farba čiary spojnice (argument musí byť objekt typuColoralebo potomok)orezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
spojnica
public GRobot.Spojnica spojnica(GRobot cieľ, Stroke čiara, Farebnosť objekt, Shape orezanieZačiatku, Shape orezanieKonca)
Vytvorí novú alebo upraví parametre jestvujúcej spojnice medzi týmto a zadaným robotom. Nová spojnica bude mať typ a farbu čiary podľa zadaných objektov. Ak spojnica jestvuje, typ a farba čiary sa aktualizujú podľa zadaných objektov. (Ide o spojnicu smerujúcu od tohto robota.) Navyše budú nastavené alebo aktualizované parametre orezania začiatku a/alebo konca spojnice – posledné dva parametre (
orezanieZačiatkuaorezanieKonca) môžu určovať tvar oblasti orezania spojnice počas jej kreslenia.Poznámka: Namiesto konkrétneho štýlu čiary alebo inštancie farebnosti je povolené zadať hodnotu
null, čo značí automatické hodnoty podľa aktuálnych vlastností zdrojového robota.- Parametre:
cieľ– partnerský robot medzi ktorým bude vytvorená alebo upravená jestvujúca spojnicačiara– objekt určujúci typ čiary spojniceobjekt– objekt, podľa ktorého sa určí farba čiary spojniceorezanieZačiatku– tvar orezania začiatku spojnice alebonull(začiatok spojnice je určený polohou tohto, zdrojového, robota)orezanieKonca– tvar orezania konca spojnice alebonull(koniec spojnice je určený polohou cieľového robota – pozri parametercieľ)- Návratová hodnota:
- nová alebo jestvujúca inštancia spojnice
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
kopírujSpojnice
public void kopírujSpojnice(GRobot odKtorého)
Skopíruje (alebo aktualizuje) všetky spojnice podľa zadaného robota. Skopírujú (aktualizujú) sa jednak spojnice, ktoré boli definované smerom k zadanému robotu a aj spojnice definované smerom od neho.
- Parametre:
odKtorého– robot, podľa ktorého budú vytvorené nové (prípadne aktualizované jestvujúce) spojnice aktuálneho robota- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),zrušSpojnicu(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
kopirujSpojnice
public void kopirujSpojnice(GRobot odKtorého)
Alias pre kopírujSpojnice.
-
zrušSpojnice
public void zrušSpojnice()
Zruší všetky spojnice smerujúce k tomuto aj od tohto robota.
- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),jeSpojnica(GRobot)
-
zrusSpojnice
public void zrusSpojnice()
Alias pre zrušSpojnice.
-
zrušSpojnicu
public void zrušSpojnicu(GRobot cieľ)
Zruší jestvujúcu spojnicu medzi týmto a zadaným robotom. (Smerujúcu od tohto robota.)
- Parametre:
cieľ– partnerský robot voči ktorému bude zrušená jestvujúca spojnica- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnice(),jeSpojnica(GRobot)
-
zrusSpojnicu
public void zrusSpojnicu(GRobot cieľ)
Alias pre zrušSpojnicu.
-
jeSpojnica
public boolean jeSpojnica(GRobot cieľ)
Zistí, či medzi týmto a zadaným robotom jestvuje spojnica smerujúca od tohto robota.
- Parametre:
cieľ– partnerský robot voči ktorému bude overená existencia spojnice- Pozri tiež:
dajSpojnicu(GRobot),spojnica(GRobot),spojnica(GRobot, double),spojnica(GRobot, Color),spojnica(GRobot, double, Color),spojnica(GRobot, double, Farebnosť),spojnica(GRobot, Farebnosť),spojnica(GRobot, Stroke),spojnica(GRobot, Stroke, Color),spojnica(GRobot, Stroke, Farebnosť),spojnica(GRobot, Shape, Shape),spojnica(GRobot, double, Shape, Shape),spojnica(GRobot, Color, Shape, Shape),spojnica(GRobot, double, Color, Shape, Shape),spojnica(GRobot, double, Farebnosť, Shape, Shape),spojnica(GRobot, Farebnosť, Shape, Shape),spojnica(GRobot, Stroke, Shape, Shape),spojnica(GRobot, Stroke, Color, Shape, Shape),spojnica(GRobot, Stroke, Farebnosť, Shape, Shape),kopírujSpojnice(GRobot),zrušSpojnicu(GRobot),zrušSpojnice(),spojniceZ(),spojniceDo(),súSpojniceZ(),súSpojniceDo()
-
máSpojnicu
public boolean máSpojnicu(GRobot cieľ)
Alias pre jeSpojnica.
-
maSpojnicu
public boolean maSpojnicu(GRobot cieľ)
Alias pre jeSpojnica.
-
spojniceZ
public GRobot.Spojnica[] spojniceZ()
Vytvorí zoznam všetkých spojníc smerujúcich z tohto robota.
- Návratová hodnota:
- zoznam spojníc smerujúcich z tohto robota
- Pozri tiež:
dajSpojnicu(GRobot),spojniceDo(),súSpojniceZ(),súSpojniceDo(),jeSpojnica(GRobot)
-
spojniceDo
public GRobot.Spojnica[] spojniceDo()
Vytvorí zoznam všetkých spojníc smerujúcich do tohto robota.
- Návratová hodnota:
- zoznam spojníc smerujúcich do tohto robota
- Pozri tiež:
dajSpojnicu(GRobot),spojniceZ(),súSpojniceZ(),súSpojniceDo(),jeSpojnica(GRobot)
-
súSpojniceZ
public boolean súSpojniceZ()
Overí, či jestvuje aspoň jedna spojnica smerujúca z tohto robota. Niekedy je užitočné rýchlo overiť túto informáciu bez zbytočného vytvárania inštancií zoznamov.
- Návratová hodnota:
true, ak jestvuje aspoň jedna spojnica smerujúca z tohto robota- Pozri tiež:
dajSpojnicu(GRobot),spojniceZ(),spojniceDo(),súSpojniceDo(),jeSpojnica(GRobot)
-
suSpojniceZ
public boolean suSpojniceZ()
Alias pre súSpojniceZ.
-
súSpojniceDo
public boolean súSpojniceDo()
Overí, či jestvuje aspoň jedna spojnica smerujúca do tohto robota. Niekedy je užitočné rýchlo overiť túto informáciu bez zbytočného vytvárania inštancií zoznamov.
- Pozri tiež:
dajSpojnicu(GRobot),spojniceZ(),spojniceDo(),súSpojniceZ(),jeSpojnica(GRobot)
-
suSpojniceDo
public boolean suSpojniceDo()
Alias pre súSpojniceDo.
-
veľkosť
public double veľkosť()
Zistí aktuálnu veľkosť robota.
Veľkosť robota je číslo, ktoré (v základnom stave
robota) vymedzuje polomer kruhového priestoru so stredom na
súradniciach robota. Chápanie údaju o veľkosti môže
programátor upraviť preprogramovaním súvisiacich metód.
Predvolená hodnota je 10.0. Veľkosť robota sa, okrem kreslenia predvoleného tvaru robota, používa aj pri základnom spôsobe detekcie kolízií, používajú ju bezparametrické verzie metóddopreduavzada má vplyv aj na kreslenie vlastného obrázkového tvaru robota (pozri aj metódumierka).Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Návratová hodnota:
- veľkosť robota
- Pozri tiež:
veľkosť(double),veľkosťDoma(),pomerDoma(),veľkosťPodľaMierky(),mierka()
-
velkost
public double velkost()
Alias pre veľkosť.
-
veľkosť
public void veľkosť(double veľkosť)
Nastaví novú veľkosť robota.
Veľkosť robota je číslo, ktoré (v základnom stave
robota) vymedzuje polomer kruhového priestoru so stredom na
súradniciach robota. Chápanie údaju o veľkosti môže
programátor upraviť preprogramovaním súvisiacich metód.
Predvolená hodnota je 10.0. Veľkosť robota sa, okrem kreslenia predvoleného tvaru robota, používa aj pri základnom spôsobe detekcie kolízií, používajú ju bezparametrické verzie metóddopreduavzada má vplyv aj na kreslenie vlastného obrázkového tvaru robota (pozri aj metódumierka).Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Parametre:
veľkosť– nová veľkosť robota (mala by byť väčšia ako nula, inak môžu vzniknúť rôzne vedľajšie efekty pri používaní robota)- Pozri tiež:
veľkosť(),veľkosťDoma(Double),pomerDoma(Double),veľkosťPodľaMierky(),mierka()
-
velkost
public void velkost(double veľkosť)
Alias pre veľkosť.
-
šírka
public double šírka()
Vráti aktuálnu šírku robota.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Definované:
šírkav rozhraníRozmer- Návratová hodnota:
- aktuálna šírka robota
- Pozri tiež:
šírka(double),máŠírku(double),rozmery()
-
výška
public double výška()
Vráti aktuálnu výšku robota.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Definované:
výškav rozhraníRozmer- Návratová hodnota:
- aktuálna výška robota
- Pozri tiež:
výška(double),máVýšku(double),rozmery()
-
šírka
public void šírka(double šírka)
Nastaví novú šírku robota.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Definované:
šírkav rozhraníRozmer- Parametre:
šírka– nová šírka robota- Pozri tiež:
šírka(),máŠírku(double),rozmery()
-
výška
public void výška(double výška)
Nastaví novú výšku robota.Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Definované:
výškav rozhraníRozmer- Parametre:
výška– nová výška robota- Pozri tiež:
výška(),máVýšku(double),rozmery()
-
rozmer
public Rozmer rozmer()
Vráti objekt obsahujúci aktuálne hodnoty šírky a výšky robota. (Ide o prepočítané hodnoty – pozri poznámku nižšie.)
Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).
Upozornenie: Do verzie 2.1 programovacieho rámca bola táto metóda aliasom metódy
veľkosť. (Z tohto vyjadrenia vyplýva, že toto už viac neplatí.) Od uvedenej verzie je táto metóda aliasom metódyrozmery(aby sa zabránilo zmätkom s podobnosťou názvov).Poznámka: Metóda pri každom volaní vytvorí novú inštanciu triedy
Rozmery. (Z toho vyplýva, že opakované a časté volanie tejto metódy je menej efektívne v porovnaní s inými metódami na zisťovanie rozmerov – znižuje výkon aplikácie.- Návratová hodnota:
- objekt vytvorený podľa aktuálnych rozmerov robota
- Pozri tiež:
šírka(),výška(),rozmery(),máŠírku(double),máVýšku(double),máRozmer(Rozmer),máRozmer(double, double),rozmer(Rozmer)
-
rozmer
public void rozmer(Rozmer rozmer)
Nastaví nové rozmery robota podľa zadanej implementácie rozmeru.
Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).
Upozornenie: Do verzie 2.1 programovacieho rámca bola táto metóda aliasom metódy
veľkosť. (Z tohto vyjadrenia vyplýva, že toto už viac neplatí.) Od uvedenej verzie je táto metóda aliasom metódyrozmery(aby sa zabránilo zmätkom s podobnosťou názvov).- Parametre:
rozmer– inštancia obsahujúca nové rozmery robota- Pozri tiež:
šírka(),výška(),rozmery(),máŠírku(double),máVýšku(double),máRozmer(Rozmer),máRozmer(double, double),rozmer()
-
rozmery
public Rozmery rozmery()
Zistí aktuálne rozmery robota.
Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Definované:
rozmeryv rozhraníRozmer- Návratová hodnota:
- objekt vytvorený podľa aktuálnych rozmerov robota
- Pozri tiež:
šírka(),výška(),rozmer(),rozmery(),máŠírku(double),máVýšku(double),máRozmer(Rozmer),máRozmer(double, double),rozmery(double, double),rozmery(Rozmer)
-
rozmery
public void rozmery(double šírka, double výška)Nastaví nové rozmery robota.
Upozornenie:
Rozmery(šírka a výška) robota sú takpovediac „tieňové“ vlastnosti. V skutočnosti sú vnútorne tieto hodnoty premietané cez vlastnosti veľkosti a pomeru robota. Pri nastavovaní rozmerov platí, že aktuálna veľkosť robota je nastavená na polovicou zadanej výšky a aktuálny pomer veľkosti robota je nastavený (vypočítaný) ako pomer (podiel) polovice zadanej šírky a novej veľkosti (ktorá bola práve vypočítaná). Podobne to platí naopak: výška je vypočítaná ako dvojnásobok aktuálnej veľkosti robota a šírka je súčinom výšky (ktorá bola práve vypočítaná) a pomeru veľkosti robota. Reálne nie sú hodnoty šírky a výšky robota uchovávané. (Vždy ide o prepočet.)Vzorce prepočtov:
// Prepočet šírky a výšky na veľkosť a pomer veľkosti// (pozor, v druhom riadku je použitá vypočítaná// hodnota z prvého riadka):veľkosť = výška /2.0; pomerVeľkosti = (šírka /2.0) / veľkosť;// (Poznámka: Ak je veľkosť nulová, tak je aj pomer nastavený na nulu.)// Prepočet veľkosti a pomeru veľkosti na šírku a výšku:šírka =2.0* veľkosť * pomerVeľkosti; výška =2.0* veľkosť;- Parametre:
šírka– nová šírka robotavýška– nová výška robota- Pozri tiež:
šírka(),výška(),rozmer(),máŠírku(double),máVýšku(double),máRozmer(Rozmer),máRozmer(double, double),rozmery(),rozmery(Rozmer)
-
rozmery
public void rozmery(Rozmer rozmer)
Nastaví nové rozmery robota podľa zadanej implementácie rozmeru.
Poznámka: Venujte pozornosť upozorneniu v opise metódy
rozmery(šírka, výška).- Definované:
rozmeryv rozhraníRozmer- Parametre:
rozmer– inštancia obsahujúca nové rozmery robota- Pozri tiež:
šírka(),výška(),rozmer(),máŠírku(double),máVýšku(double),máRozmer(Rozmer),máRozmer(double, double),rozmery(),rozmery(double, double)
-
máŠírku
public boolean máŠírku(double šírka)
Zistí, či má robot zadanú šírku.
-
maSirku
public boolean maSirku(double šírka)
Alias pre máŠírku.
-
máVýšku
public boolean máVýšku(double výška)
Zistí, či má robot zadanú výšku.
-
maVysku
public boolean maVysku(double výška)
Alias pre máVýšku.
-
máRozmer
public boolean máRozmer(Rozmer rozmer)
Overí, či sa rozmery robota a rozmery zadaného objektu dokonale zhodujú. Ak je zistená zhoda, tak je výsledkom
true, v opačnom prípade hodnotafalse.
-
máRozmer
public boolean máRozmer(double šírka, double výška)Overí, či sa rozmery robota dokonale zhodujú so zadanými rozmermi. Ak je zistená zhoda, tak je výsledkom
true, v opačnom prípade hodnotafalse.
-
maRozmer
public boolean maRozmer(double šírka, double výška) Alias pre máRozmer.
-
veľkosťPodľaMierky
public void veľkosťPodľaMierky()
Nastaví veľkosť robota podľa aktuálnej mierky tak, aby sa hodnota mierky vyrovnala na
1.0. (Ak bola veľkosť mierky už predtým jednotková, volanie metódy nebude mať žiadny efekt.) Ak mala mierka napríklad hodnotu2.0, tak sa veľkosť robota zdvojnásobí (a mierka sa zresetuje na hodnotu1.0).- Pozri tiež:
veľkosťPodľaMierky(double),veľkosť(),mierka()
-
velkostPodlaMierky
public void velkostPodlaMierky()
Alias pre veľkosťPodľaMierky.
-
veľkosťPodľaMierky
public void veľkosťPodľaMierky(double zmena)
Nastaví veľkosť robota podľa aktuálnej mierky tak, aby nová hodnota mierky nadobudla zadanú hodnotu.
Ak je napríklad veľkosť mierky rovná
2.0, veľkosť robota rovná20.0a zadaná hodnota je rovná3.0, tak nová veľkosť robota bude30.0a mierka3.0.Alebo napríklad veľkosť mierky rovná
4.0, veľkosť robota rovná25.0a zadaná hodnota rovná6.0, tak nová veľkosť robota bude rovná37.5(a nová hodnota mierky6.0).- Parametre:
zmena– hodnota, ktorú má mať mierka po zmene veľkosti robota- Pozri tiež:
veľkosťPodľaMierky(),veľkosť(),mierka()
-
velkostPodlaMierky
public void velkostPodlaMierky(double zmena)
Alias pre veľkosťPodľaMierky.
-
pomerPodľaMierky
public void pomerPodľaMierky()
Nastaví pomer veľkosti robota podľa aktuálnej mierky pomeru tak, aby sa hodnota mierky pomeru vyrovnala na
1.0. (Ak bola mierka pomeru už predtým jednotková, volanie metódy nebude mať žiadny efekt.) Ak mala mierka pomeru napríklad hodnotu2.0, tak sa pomer veľkosti robota zdvojnásobí (a mierka pomeru sa zresetuje na hodnotu1.0).- Pozri tiež:
pomerPodľaMierky(double),pomer(),mierkaPomeru()
-
pomerPodlaMierky
public void pomerPodlaMierky()
Alias pre pomerPodľaMierky.
-
pomerPodľaMierky
public void pomerPodľaMierky(double zmena)
Nastaví pomer veľkosti robota podľa aktuálnej mierky pomeru tak, aby nová hodnota mierky pomeru nadobudla zadanú hodnotu.
Ak je napríklad hodnota mierky pomeru rovná
2.0, pomer veľkosti robota sa rovná20.0a zadaná hodnota je rovná3.0, tak nová pomeru veľkosti robota bude30.0a mierka pomeru3.0.Alebo napríklad hodnota mierky pomeru sa rovná
4.0, pomer veľkosti robota je rovný25.0a zadaná hodnota zmeny je6.0, tak nová hodnota pomeru veľkosti robota bude rovná37.5(a nová hodnota mierky pomeru6.0).- Parametre:
zmena– hodnota, ktorú má mať mierka pomeru po korekcii pomeru veľkosti robota- Pozri tiež:
pomerPodľaMierky(),pomer(),mierkaPomeru()
-
pomerPodlaMierky
public void pomerPodlaMierky(double zmena)
Alias pre pomerPodľaMierky.
-
mierka
public double mierka()
Zistí aktuálnu hodnotu mierky robota.
Táto hodnota je prepočítavaná vnútorne. Na mierku má vplyv aj
zmena hodnoty veľkosti robota
(pretože mierka je v skutočnosti pomerom aktuálnej
veľkosti robota a veľkosti robota, ktorú mal pri svojom
vytvorení, resete mierky alebo pri poslednej zmene mierky). Mierka sa resetuje
pri zmene vlastného
obrázkového tvaru robota.Mierka pôvodne primárne slúžila na úpravu veľkosti obrázkov pri ich kreslení robotom. Mierka má vplyv aj na kreslenie oblastí a tvarov Javy robotom. V tej súvislosti aj na zisťovanie prítomnosti bodov v tvaroch a prípadne na ďalšie súvisiace vlastnosti/funkcie programovacieho rámca.
Mierka nemá vplyv na veľkosť kreslenia tvarov robota bezparametrickými verziami metód (napríklad
kružnica()), ani na mieru pohybu robota bezparametrickými verziami metód pohybu (napríkladdopredu()). Má vplyv iba na veľkosť vlastného obrázkového tvaru robota.- Návratová hodnota:
- aktuálna mierka robota
- Pozri tiež:
mierka(double),veľkosť(),veľkosťPodľaMierky()
-
mierka
public void mierka(double mierka)
Upraví aktuálnu mierku robota. Táto
hodnota je prepočítavaná vnútorne. Na mierku má vplyv aj zmena
hodnoty veľkosti robota. Ďalšie
informácie o význame a vplyve mierky sú v opise metódy
mierka().- Parametre:
mierka– nová mierka robota- Pozri tiež:
mierka(),veľkosť(),veľkosťPodľaMierky()
-
mierkaPomeru
public double mierkaPomeru()
Zistí aktuálnu hodnotu mierky pomeru
veľkosti robota. Táto hodnota je prepočítavaná vnútorne. Na
mierku pomeru veľkosti má vplyv aj zmena hodnoty pomeru veľkosti robota (pretože mierka pomeru
veľkosti je v skutočnosti pomerom aktuálneho pomeru veľkosti
robota a pomeru, ktorý mal nastavený pri svojom vytvorení,
resete mierky pomeru alebo pri poslednej zmene mierky pomeru). Mierka sa
resetuje pri zmene vlastného
obrázkového tvaru robota.Táto mierka ovplyvňuje aj rozmery obrázkov pri ich kreslení robotom. Má vplyv aj na kreslenie oblastí a tvarov Javy robotom. V tej súvislosti aj na zisťovanie prítomnosti bodov v tvaroch a prípadne na ďalšie súvisiace vlastnosti/funkcie programovacieho rámca.
Táto mierka nemá vplyv na rozmery kreslenia tvarov robota bezparametrickými verziami metód (napríklad
elipsa()), ani na mieru pohybu robota bezparametrickými verziami metód pohybu (napríkladposuňVpravo()). Má vplyv iba na rozmer vlastného obrázkového tvaru robota.- Návratová hodnota:
- aktuálna mierka pomeru veľkosti robota
- Pozri tiež:
mierkaPomeru(double),pomer(),pomerPodľaMierky()
-
mierkaPomeru
public void mierkaPomeru(double mierka)
Upraví aktuálnu mierku pomeru
veľkosti tohto robota. Táto hodnota je prepočítavaná vnútorne.
Má na ňu vplyv aj zmena hodnoty pomeru
veľkosti robota. Ďalšie informácie o význame a vplyve tejto
mierky sú v opise metódy mierkaPomeru().- Parametre:
mierka– nová mierka pomeru veľkosti robota- Pozri tiež:
mierkaPomeru(),pomer(),pomerPodľaMierky()
-
pomer
public double pomer()
Zistí aktuálnu hodnotu pomeru
rozmerov (šírky a výšky) robota. Táto hodnota ovplyvňyje aj
pomer šírky a výšky tých tvarov, pri ktorých nemusia byť ich
rozmery (šírky a výšky) zhodné, čiže napríklad
elipsy a obdĺžnika.Pomer má vplyv len na tie metódy generovania tvarov, ktoré neprijímajú žiadny argument. Výška tvaru je určená veľkosťou robota a šírka je od nej odvodená (vypočítaná podľa hodnoty pomeru). Predvolená hodnota pomeru je
1.0, čiže generované tvary majú predvolene rovnakú šírku a výšku. Ak sa hodnota pomeru zmení (napríklad) na2.0, tak tvary budú mať dvojnásobnú šírku, ak na0.5, tak polovičnú a tak ďalej.
V tejto súvislosti venujte pozornosť upozorneniu v opise metódyrozmery(šírka, výška).
Ukážky pomerov veľkostí: vľavo „obdĺžnik“ s predvoleným pomerom veľkostí (1; čiže štvorec, ibaže nakreslený metódouobdĺžnik), v strede obdĺžnik s pomerom 0,8 a vpravo s pomerom 1,2.- Návratová hodnota:
- aktuálny pomer rozmerov robota
- Pozri tiež:
pomer(double),elipsa(),obdĺžnik(),veľkosť()
-
pomer
public void pomer(double pomer)
Upraví aktuálny pomer rozmeru
robota, čo má priamy vplyv na generovanie niektorých tvarov
robotom.
Ide o pomer šírky a výšky robota a v tej súvislosti tých
tvarov, pri ktorých nemusia byť obidva ich rozmery (šírka
a výška) zhodné, čiže napríklad elipsa
a obdĺžnik.
Pomer má vplyv len na tie metódy generovania tvarov, ktoré
neprijímajú žiadny argument. Rozmer dotknutých tvarov je,
okrem tohto čísla, určený veľkosťou
robota. Ďalšie informácie o význame a vplyve pomeru sú v opise
metódy pomer().Poznámka: Od verzie 2.1 je pomer využívaný aj pri implementácii rozhrania
Rozmer. V tejto súvislosti venujte pozornosť upozorneniu v opise metódyrozmery(šírka, výška).- Parametre:
pomer– nový pomer rozmerov robota- Pozri tiež:
pomer(),elipsa(),obdĺžnik(),veľkosť()
-
zaoblenie
public double[] zaoblenie()
Zistí aktuálne hodnoty šírky a výšky zaoblenia rohov pravouhlých útvarov generovaných robotom (štvorca a obdĺžnika).
Ukážky zaoblenia: vľavo obdĺžnik bez zaoblenia rohov, v strede nerovnomerné zaoblenie rohov (15 bodov horizontálne a 45 bodov vertikálne) a vpravo rovnomerné zaoblenie rohov (50 bodov).- Návratová hodnota:
- reálnočíselné pole s hodnotami šírky a výšky zaoblenia
- Pozri tiež:
zaoblenie(double),zaoblenie(double, double),zaoblenieX(),zaoblenieX(double),zaoblenieY(),zaoblenieY(double),štvorec(),obdĺžnik(),veľkosť(),pomer()
-
zaoblenie
public void zaoblenie(double zaoblenie)
Nastaví hodnoty zaoblenia rohov pravouhlých útvarov generovaných robotom (štvorca a obdĺžnika).
- Parametre:
zaoblenie– nová hodnota zaoblenia (platí na šírku aj výšku zároveň)- Pozri tiež:
zaoblenie(),zaoblenie(double, double),zaoblenieX(),zaoblenieX(double),zaoblenieY(),zaoblenieY(double),štvorec(),obdĺžnik(),veľkosť(),pomer()
-
zaoblenie
public void zaoblenie(double zaoblenieX, double zaoblenieY)Nastaví šírku a výšku zaoblenia rohov pravouhlých útvarov generovaných robotom (štvorca a obdĺžnika).
- Parametre:
zaoblenieX– nová šírka zaobleniazaoblenieY– nová výška zaoblenia- Pozri tiež:
zaoblenie(),zaoblenie(double),zaoblenieX(),zaoblenieX(double),zaoblenieY(),zaoblenieY(double),štvorec(),obdĺžnik(),veľkosť(),pomer()
-
zaoblenieX
public double zaoblenieX()
Zistí aktuálnu hodnotu šírky
zaoblenia rohov pravouhlých útvarov generovaných robotom
(štvorca a obdĺžnika).- Návratová hodnota:
- šírka zaoblenia
- Pozri tiež:
zaoblenie(),zaoblenie(double),zaoblenie(double, double),zaoblenieX(double),zaoblenieY(),zaoblenieY(double),štvorec(),obdĺžnik(),veľkosť(),pomer()
-
zaoblenieX
public void zaoblenieX(double zaoblenieX)
Upraví šírku zaoblenia rohov
pravouhlých útvarov generovaných robotom (štvorca
a obdĺžnika).- Parametre:
zaoblenieX– nová šírka zaoblenia- Pozri tiež:
zaoblenie(),zaoblenie(double),zaoblenie(double, double),zaoblenieX(),zaoblenieY(),zaoblenieY(double),štvorec(),obdĺžnik(),veľkosť(),pomer()
-
zaoblenieY
public double zaoblenieY()
Zistí aktuálnu hodnotu výšky
zaoblenia rohov pravouhlých útvarov generovaných robotom
(štvorca a obdĺžnika).- Návratová hodnota:
- výška zaoblenia
- Pozri tiež:
zaoblenie(),zaoblenie(double),zaoblenie(double, double),zaoblenieX(),zaoblenieX(double),zaoblenieY(double),štvorec(),obdĺžnik(),veľkosť(),pomer()
-
zaoblenieY
public void zaoblenieY(double zaoblenieY)
Upraví výšku zaoblenia rohov
pravouhlých útvarov generovaných robotom (štvorca
a obdĺžnika).- Parametre:
zaoblenieX– nová výška zaoblenia- Pozri tiež:
zaoblenie(),zaoblenie(double),zaoblenie(double, double),zaoblenieX(),zaoblenieX(double),zaoblenieY(),štvorec(),obdĺžnik(),veľkosť(),pomer()
-
kolíznaOblasť
public Oblasť kolíznaOblasť()
Vráti objekt aktívnej kolíznej oblasti
tohto robota alebo null, ak oblasť nebola definovaná. Pre viac informácií pozrite setter vlastnostikolíznaOblasť.- Návratová hodnota:
- objekt typu
Oblasťalebonull
-
koliznaOblast
public Oblast koliznaOblast()
Alias pre kolíznaOblasť.
-
kolíznaOblasť
public void kolíznaOblasť(Shape podľaTvaru)
S pomocou zadaného tvaru definuje
novú kolíznu oblasť, ktorú bude od tohto okamihu využívať
robot na detekciu kolízií pomocou metódy koliduje. Použitie kolíznej oblasti je v rozpoznávaní kolízií presnejšie, ale značne pomalšie než predvolený spôsob detekcie kolízií (kružnicami; pozri metódukoliduje). Ak chcete kolíznu oblasť zrušiť, tak buď zadajte namiesto argumentu tejto metódy hodnotunull, alebo zavolajte metóduzrušKolíznuOblasť.Podrobnosti o spôsobe detekcie kolízií a význame kolíznej oblasti nájdete v opise metódy
koliduje.
-
koliznaOblast
public void koliznaOblast(Shape podľaTvaru)
Alias pre kolíznaOblasť.
-
zrušKolíznuOblasť
public void zrušKolíznuOblasť()
Zruší kolíznu oblasť. Od tohto okamihu
budú kolízie vyhodnocované predvoleným spôsobom – pozri opisy
metód kolíznaOblasťakoliduje.
-
zrusKoliznuOblast
public void zrusKoliznuOblast()
Alias pre zrušKolíznuOblasť.
-
koliduje
public boolean koliduje(GRobot iný)
Zistí, či tento a zadaný robot vzájomne „kolidujú,“ t. j. či nastala ich vzájomná „zrážka“ alebo nie. Overenie tejto situácie nie je jednoduchá a priamočiara záležitosť. Najjednoduchší (a výpočtovo najrýchlejší) spôsob je zistiť ich vzájomnú vzdialenosť, ktorá ak klesne pod určitú hranicu (v tomto prípade sa berie do úvahy súčet veľkostí oboch robotov), tak to bude vyhodnotené ako kolízia. V praxi tento prístup vytvorí efekt „neviditeľných kruhových bublín“ okolo stredov obidvoch robotov, ktorých „stret“ (čiatočné prekrytie) znamená kolíziu:
Dva roboty na kolíznom kurze a pri kolízii
(šedé kružnice sú ilustračné – v podstate označujú
neviditeľné bubliny, o ktorých sa píše vyššie).Príklad:
V nasledujúcom príklade sú inicializovaní modrý a tyrkysový robot, v rámci čoho sú nasmerovaní na kolízny kurz zo svojej (novej) domovskej pozície. Po zrážke sa vrátia späť na domovskú pozíciu a celý cyklus sa zopakuje.
// Inicializácia modrého robotaprivatefinalstaticGRobotmodrý =newGRobot() {{zdvihniPero();farba(modrá);veľkosť(20);domov(40,35,200);rýchlosť(10); }};// Inicializácia tyrkysového robotaprivatefinalstaticGRobottyrkysový =newGRobot() {{zdvihniPero();farba(tyrkysová);veľkosť(15);domov(-40, -35,80);rýchlosť(10); }};// Konštruktor hlavnej triedyprivateHlavnáTrieda() {skry();aktivuj(); }@Overridepublicvoidaktivita() {// Detekcia kolízií modrého a tyrkysového robota// v reakcii na aktivitu v hlavnej triedeif(modrý.koliduje(tyrkysový)) {Svet.pípni(); modrý.domov(); tyrkysový.domov(); } }Výsledok:
Animácia príkladu.Tento základný prístup však nemusí vždy vyhovovať. Ak chceme dosiahnuť presné zistenie kolízie, musíme zvoliť iný spôsob. Roboty podporujú určenie kolíznej oblasti. Zistenie stretu dvoch robotov pomocou oblastí je presné, ale náročnejšie na výpočet, takže je zároveň aj pomalšie. Použitie kolíznych oblastí je potrebné vopred dobre zvážiť. Odporúčame ich používať veľmi obozretne – v menšej miere. Rozhodne nie pre veľké množstvo naraz jestvujúcich potenciálne kolidujúcich robotov.
Ďalším spôsobom zistenia kolízie môže byť overenie, či sa určitý bod (napríklad robot, resp. jeho poloha) nachádza v sledovanom útvare – kruhu, elipse, štvorci, obdĺžniku, ceste, oblasti, tvare…
Upozornenie: Ak má aspoň jeden robot definovanú kolíznu oblasť, tak je braná do úvahy aj mierka robotov. V opačnom prípade nemá mierka na funkciu tejto metódy vplyv.
- Parametre:
iný– iný robot, ktorého vzájomnú kolíziu s týmto robotom chceme otestovať
-
vzdialenosť
public double vzdialenosť()
Zistí, aká je vzdialenosť tohto robota od stredu súradnicovej sústavy.
- Návratová hodnota:
- vzdialenosť robota od stredu súradnicovej sústavy
- Pozri tiež:
vzdialenosťOd(double, double),vzdialenosťOd(Poloha),vzdialenosťOd(Shape),vzdialenosťOdMyši(),Svet.vzdialenosť(Poloha)
-
vzdialenost
public double vzdialenost()
Alias pre vzdialenosť.
-
vzdialenosťOd
public double vzdialenosťOd(double súradnicaBoduX, double súradnicaBoduY)Zistí vzdialenosť medzi týmto robotom a zadanými súradnicami na podlahe (strope).
- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
- vzdialenosť medzi týmto robotom a zadaným bodom
- Pozri tiež:
vzdialenosť(),vzdialenosťOd(Poloha),vzdialenosťOdMyši()
-
vzdialenostOd
public double vzdialenostOd(double súradnicaBoduX, double súradnicaBoduY) Alias pre vzdialenosťOd.
-
vzdialenosťK
public double vzdialenosťK(double súradnicaBoduX, double súradnicaBoduY) Alias pre vzdialenosťOd.
-
vzdialenostK
public double vzdialenostK(double súradnicaBoduX, double súradnicaBoduY) Alias pre vzdialenosťOd.
-
vzdialenosťOd
public double vzdialenosťOd(Poloha objekt)
Zistí vzdialenosť medzi týmto a zadaným objektom.
- Parametre:
objekt– objekt od ktorého zisťujeme vzdialenosť- Návratová hodnota:
- vzdialenosť medzi týmto robotom a zadaným objektom
- Pozri tiež:
vzdialenosť(),vzdialenosťOd(double, double),vzdialenosťOd(Poloha),vzdialenosťOd(Shape),vzdialenosťOdMyši(),Svet.vzdialenosť(Poloha)
-
vzdialenostOd
public double vzdialenostOd(Poloha objekt)
Alias pre vzdialenosťOd.
-
vzdialenosťK
public double vzdialenosťK(Poloha objekt)
Alias pre vzdialenosťOd.
-
vzdialenostK
public double vzdialenostK(Poloha objekt)
Alias pre vzdialenosťOd.
-
vzdialenosťOd
public double vzdialenosťOd(Shape tvar)
Zistí vzdialenosť medzi týmto robotom a stredom hraníc[1] zadaného tvaru.
[1] – nejde presne o stred útvaru; je použitý najrýchlejší a najjednoduchší spôsob zistenia približného stredu: vezme sa obdĺžnik tesne ohraničujúci útvar a určí sa jeho stred – čiže „stred hraníc.“
- Parametre:
tvar– tvar Javy (Shape), od stredu hraníc ktorého zisťujeme vzdialenosť- Návratová hodnota:
- vzdialenosť medzi robotom a stredom hraníc zadaného tvaru
- Pozri tiež:
vzdialenosť(),vzdialenosťOd(Poloha),vzdialenosťOdMyši()
-
vzdialenostOd
public double vzdialenostOd(Shape tvar)
Alias pre vzdialenosťOd.
-
vzdialenosťK
public double vzdialenosťK(Shape tvar)
Alias pre vzdialenosťOd.
-
vzdialenostK
public double vzdialenostK(Shape tvar)
Alias pre vzdialenosťOd.
-
vzdialenosťOdMyši
public double vzdialenosťOdMyši()
Zistí vzdialenosť medzi týmto robotom a aktuálnymi súradnicami myši.
- Návratová hodnota:
- vzdialenosť medzi týmto robotom a súradnicami myši
- Pozri tiež:
vzdialenosť(),vzdialenosťOd(Poloha),Svet.vzdialenosť(Poloha)
-
vzdialenostOdMysi
public double vzdialenostOdMysi()
Alias pre vzdialenosťOdMyši.
-
vzdialenosťKMyši
public double vzdialenosťKMyši()
Alias pre vzdialenosťOdMyši.
-
vzdialenostKMysi
public double vzdialenostKMysi()
Alias pre vzdialenosťOdMyši.
-
kresliTvar
public void kresliTvar()
Táto metóda je predvolene prázdna. Jej prekrytím dokážeme upraviť predvolený tvar robota. Kreslenie v tele prekrytej metódy
kresliTvarpodlieha rovnakým pravidlám ako kreslenie v tele metódyKreslenieTvaru.kresli(GRobotr). Prekrytie tejto metódy (kresliTvar) je síce najjednoduchší spôsob zmeny tvaru robota, ale je menej efektívny.Poznámka: Účinnosť tejto metódy môže zrušiť volanie metódy
vlastnýTvar(pozri jej opis) a opätovne obnoviť volanie niektorej z verzií metódpredvolenýTvar.Poznámka: Robot má definovanú ešte jednu metódu s rovnakým účelom:
kresliSeba. Stačí prekryť jednu z nich. Ak sú prekryté obe, tak je najprv volaná metódakresliTvara potom metódakresliSeba.Poznámka: Táto metóda v skrytosti využíva rovnaký mechanizmus ako definovanie vlastného tvaru. Pre väčšie množstvá inštancií jednej triedy odporúčame:
- implementovať rozhranie
KreslenieTvaru, ktoré obsahuje metódukresli, - staticky vytvoriť jednu inštanciu z tejto implementácie
- a tú vzápätí využiť (napríklad v konštruktore triedy)
vo volaní metódy
vlastnýTvar(tvar). Príklad je v opise rozhraniaKreslenieTvaru.)
Upozornenie: Vlastné kreslenie tvaru vždy zálohuje vlastnosti robota pred začatím kreslenia tvaru a obnovuje ich po skončení kreslenia. Pozor však na spúšťanie automatického prekresľovania počas inicializácie projektu. Tento proces totiž funguje inak. Preto ak programujete komplexnejší projekt, tak vždy vypnite automatické prekresľovanie pred začatím inicializácie a obnovte ho po dokončení inicializácie projektu, prípadne vytvorte iný spôsob prekresľovania – pozri napríklad príklad s prekresľovaním v časovači v rámci opisu metódy nebolPrekreslený.
Inicializácia totiž spúšťa prekresľovanie iným spôsobom ako pri „klasickom“ prekresľovaní, ktorý nedokáže zálohovať hodnoty vlastností. Vlastné kreslenie je určené najmä pre komplexnejšie projekty, pri ktorých sa predpokladá vypnutie automatického prekresľovania. Zapnuté automatické prekresľovanie je zase predpokladané pri jednoduchších projektoch, pri ktorých by zložitejšie mechanizmy boli zbytočnou komplikáciou a bránili by študentovi priamo vidieť priebeh procesu kreslenia. Tieto dve roviny fungovania programovacieho rámca nie sú vzájomne kompatibilné.Príklad:
Robot s metódou
kresliTvarprekrytou nasledujúcim spôsobom bude mať tvar kružnice:@OverridepublicvoidkresliTvar() {kružnica(); }Poznámka: Ak potrebujete vytlačiť na aktuálne plátno pečiatku aktuálneho tvaru, volajte metódu
pečiatka.Poznámka: Názov tejto metódy koliduje s názvom novších metód
kresliTvar(tvar)akresliTvar(tvar, upravRobotom)určených na kreslenie obrysov tvarov Javy, ktoré mohli byť napríklad importované z SVG súboru. Okrem toho je definovaná metódakresliTvary(), ktorá slúži na opätovné povolenie kreslenia tvarov a písania textov robotom po ich vypnutí metódounekresliTvary(). - implementovať rozhranie
-
kresliSeba
public void kresliSeba()
Táto metóda je predvolene prázdna. Jej prekrytím dokážeme upraviť predvolený tvar robota. Kreslenie v tele prekrytej metódy
kresliSebapodlieha rovnakým pravidlám ako kreslenie v tele metódyKreslenieTvaru.kresli(GRobotr). Prekrytie tejto metódy (kresliSeba) je síce najjednoduchší spôsob zmeny tvaru robota, ale je menej efektívny.Poznámka: Účinnosť tejto metódy môže zrušiť volanie metódy
vlastnýTvar(pozri jej opis) a opätovne obnoviť volanie niektorej z verzií metódpredvolenýTvar.Poznámka: Robot má definovanú ešte jednu metódu s rovnakým účelom:
kresliTvar. Stačí prekryť jednu z nich. Ak sú prekryté obe, tak je najprv volaná metódakresliTvara potom metódakresliSeba.Poznámka: Táto metóda v skrytosti využíva rovnaký mechanizmus ako definovanie vlastného tvaru. Pre väčšie množstvá inštancií jednej triedy odporúčame:
- implementovať rozhranie
KreslenieTvaru, ktoré obsahuje metódukresli, - staticky vytvoriť jednu inštanciu z tejto implementácie
- a tú vzápätí využiť (napríklad v konštruktore triedy)
vo volaní metódy
vlastnýTvar(tvar). Príklad je v opise rozhraniaKreslenieTvaru.)
Upozornenie: Vlastné kreslenie tvaru vždy zálohuje vlastnosti robota pred začatím kreslenia tvaru a obnovuje ich po skončení kreslenia. Pozor však na spúšťanie automatického prekresľovania počas inicializácie projektu. Tento proces totiž funguje inak. Preto ak programujete komplexnejší projekt, tak vždy vypnite automatické prekresľovanie pred začatím inicializácie a obnovte ho po dokončení inicializácie projektu, prípadne vytvorte iný spôsob prekresľovania – pozri napríklad príklad s prekresľovaním v časovači v rámci opisu metódy nebolPrekreslený.
Inicializácia totiž spúšťa prekresľovanie iným spôsobom ako pri „klasickom“ prekresľovaní, ktorý nedokáže zálohovať hodnoty vlastností. Vlastné kreslenie je určené najmä pre komplexnejšie projekty, pri ktorých sa predpokladá vypnutie automatického prekresľovania. Zapnuté automatické prekresľovanie je zase predpokladané pri jednoduchších projektoch, pri ktorých by zložitejšie mechanizmy boli zbytočnou komplikáciou a bránili by študentovi priamo vidieť priebeh procesu kreslenia. Tieto dve roviny fungovania programovacieho rámca nie sú vzájomne kompatibilné.Príklad:
Robot s metódou
kresliSebaprekrytou nasledujúcim spôsobom bude mať tvar hviezdy:@OverridepublicvoidkresliSeba() {hviezda(); }Poznámka: Ak potrebujete vytlačiť na aktuálne plátno pečiatku aktuálneho tvaru, volajte metódu
pečiatka. - implementovať rozhranie
-
predvolenýTvar
public void predvolenýTvar()
Nastaví predvolený tvar robota. Predvoleným tvarom robota je buď trojzubec (vyplnený alebo dutý, podľa toho, či je zapnuté alebo vypnuté vypĺňanie tvarov robotom), alebo tvar kreslený prekrytou metódou
kresliTvaralebokresliSeba.
-
predvolenyTvar
public void predvolenyTvar()
Alias pre predvolenýTvar.
-
predvolenýVyplnenýTvar
public void predvolenýVyplnenýTvar()
Nastaví predvolený vyplnený tvar robota. Predvoleným tvarom robota je buď trojzubec (v tomto prípade vyplnený), alebo tvar kreslený prekrytou metódou
kresliTvaralebokresliSeba.
-
predvolenyVyplnenyTvar
public void predvolenyVyplnenyTvar()
Alias pre predvolenýVyplnenýTvar.
-
predvolenýDutýTvar
public void predvolenýDutýTvar()
Nastaví predvolený dutý tvar robota. Predvoleným tvarom robota je buď trojzubec (v tomto prípade dutý), alebo tvar kreslený prekrytou metódou
kresliTvaralebokresliSeba.
-
predvolenyDutyTvar
public void predvolenyDutyTvar()
Alias pre predvolenýDutýTvar.
-
predvolenýTvar
public void predvolenýTvar(boolean vyplnený)
Nastaví predvolený tvar robota. Predvoleným tvarom robota je buď trojzubec (vyplnený alebo dutý – v tomto prípade to závisí od hodnoty zadanej do parametra), alebo tvar kreslený prekrytou metódou
kresliTvaralebokresliSeba. Argumentvyplnenýmá význam len ak nebola prekrytá metódakresliTvaranikresliSeba. Vtedy zostáva predvoleným tvarom trojzubec a hodnota tohto argumentu umožňuje určiť, či má byť vyplnený alebo kreslený obrysom (dutý).- Parametre:
vyplnený– ak jetruea aktuálna inštancia nemá prekrytú metódukresliTvaranikresliSeba, tak kreslí vyplnený trujzubec, inak jeho obrys- Pozri tiež:
kresliTvar(),kresliSeba(),predvolenýTvar(),predvolenýVyplnenýTvar(),predvolenýDutýTvar(),jePredvolenýTvarVyplnený(),vlastnýTvar(String),vlastnýTvar(Image),vlastnýTvar(String, boolean),vlastnýTvar(Image, boolean),vlastnýTvar(KreslenieTvaru)
-
predvolenyTvar
public void predvolenyTvar(boolean vyplnený)
Alias pre predvolenýTvar.
-
jePredvolenýTvarVyplnený
public boolean jePredvolenýTvarVyplnený()
Overí spôsob kreslenia predvoleného tvaru trojzubca. Ak je robot v stave, kedy je jeho predvoleným tvarom trojzubec (pozri opis metódy
predvolenýTvar(vyplnený)alebo jej príbuzných), tak táto metóda overí, či má byť vyplnený alebo dutý.- Návratová hodnota:
trueak má byť predvolený tvar trojzubca vyplnený,falseak má byť dutý- Pozri tiež:
kresliTvar(),kresliSeba(),predvolenýTvar(),predvolenýVyplnenýTvar(),predvolenýDutýTvar(),predvolenýTvar(boolean),vlastnýTvar(String),vlastnýTvar(Image),vlastnýTvar(String, boolean),vlastnýTvar(Image, boolean),vlastnýTvar(KreslenieTvaru)
-
jePredvolenyTvarVyplneny
public boolean jePredvolenyTvarVyplneny()
Alias pre jePredvolenýTvarVyplnený.
-
vlastnýTvar
public void vlastnýTvar(String súbor)
Zmení tvar robota z klasického tvaru na zadaný obrázok. Ak bola predtým volaná metóda
vlastnýTvar(KreslenieTvaru tvar), tak ňou definované vlastné kreslenie bude zrušené.Nastavenie vlastného tvaru obrázka zresetuje mierku robota. Ak chcete, aby veľkosť robota (aspoň približne) korešpondovala s veľkosťou obrázka, tak nastavte veľkosť robota na vhodnú hodnotu ešte pred nastavením vlastného tvaru obrázka alebo volajte metódu
vlastnýTvar("názov", upravVeľkosťRobota)s druhým argumentomtrue.Tipy: Vhodná hodnota by mohla byť napríklad priemerná hodnota vypočítaná zo šírky a výšky obrázka. Presne túto hodnotu používa metóda
vlastnýTvar("názov", upravVeľkosťRobota). Ak chcete kombinovať vlastné kreslenie tvaru s obrázkami, použite iba vlastné kreslenie tvaru robota používajúce rozhranieKreslenieTvarua v tele metódykresliuvedeného rozhrania volajte metódu robotar.obrázok("názov súboru").Obrázok prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť použitý namiesto predvoleného tvaru robota- Výnimky:
GRobotException– ak súbor s obrázkom nebol nájdený- Pozri tiež:
kresliTvar(),kresliSeba(),predvolenýTvar(),predvolenýVyplnenýTvar(),predvolenýDutýTvar(),predvolenýTvar(boolean),jePredvolenýTvarVyplnený(),vlastnýTvar(Image),vlastnýTvar(String, boolean),vlastnýTvar(Image, boolean),vlastnýTvar(KreslenieTvaru),Svet.priečinokObrázkov(String)
-
vlastnyTvar
public void vlastnyTvar(String súbor)
Alias pre vlastnýTvar.
-
vlastnýTvar
public void vlastnýTvar(Image obrázok)
Zmení tvar robota z klasického tvaru na zadaný obrázok. Ak bola predtým volaná metóda
vlastnýTvar(KreslenieTvaru tvar), tak ňou definované vlastné kreslenie bude zrušené.Nastavenie vlastného tvaru obrázka zresetuje mierku robota. Ak chcete, aby veľkosť robota (aspoň približne) korešpondovala s veľkosťou obrázka, tak nastavte veľkosť robota na vhodnú hodnotu ešte pred nastavením vlastného tvaru obrázka alebo volajte metódu
vlastnýTvar(obrázok, upravVeľkosťRobota)s druhým argumentomtrue.Tipy: Vhodná hodnota by mohla byť napríklad priemerná hodnota vypočítaná zo šírky a výšky obrázka. Presne túto hodnotu používa metóda
vlastnýTvar(obrázok, upravVeľkosťRobota). Ak chcete kombinovať vlastné kreslenie tvaru s obrázkami, použite iba vlastné kreslenie tvaru robota používajúce rozhranieKreslenieTvarua v tele metódykresliuvedeného rozhrania volajte metódu robotar.obrázok(obrázok).- Parametre:
obrázok– obrázok, ktorý má byť použitý namiesto predvoleného tvaru robota- Pozri tiež:
kresliTvar(),kresliSeba(),predvolenýTvar(),predvolenýVyplnenýTvar(),predvolenýDutýTvar(),predvolenýTvar(boolean),jePredvolenýTvarVyplnený(),vlastnýTvar(String),vlastnýTvar(String, boolean),vlastnýTvar(Image, boolean),vlastnýTvar(KreslenieTvaru)
-
vlastnyTvar
public void vlastnyTvar(Image obrázok)
Alias pre vlastnýTvar.
-
vlastnýTvar
public void vlastnýTvar(String súbor, boolean upravVeľkosťRobota)
Zmení tvar robota z klasického tvaru na zadaný obrázok. Ak bola predtým volaná metóda
vlastnýTvar(KreslenieTvaru tvar), tak ňou definované vlastné kreslenie bude zrušené. Ak je parameterupravVeľkosťRobotarovnýtrue, tak bude zároveň upravenáveľkosťrobota a to tak, aby zodpovedala priemeru šírky a výšky obrázka.Tip: Ak chcete kombinovať vlastné kreslenie tvaru s obrázkami, použite iba vlastné kreslenie tvaru robota používajúce rozhranie
KreslenieTvarua v tele metódykresliuvedeného rozhrania volajte metódu robotar.obrázok("názov súboru").Obrázok prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)- Parametre:
súbor– názov súboru s obrázkom, ktorý má byť použitý namiesto predvoleného tvaru robotaupravVeľkosťRobota– hodnotatrueurčuje, že pred nastavením vlastného tvaru obrázka robota má byť upravená jeho veľkosť tak, aby zodpovedala priemeru šírky a výšky obrázka- Výnimky:
GRobotException– ak súbor s obrázkom nebol nájdený- Pozri tiež:
kresliTvar(),kresliSeba(),predvolenýTvar(),predvolenýVyplnenýTvar(),predvolenýDutýTvar(),predvolenýTvar(boolean),jePredvolenýTvarVyplnený(),vlastnýTvar(String),vlastnýTvar(Image),vlastnýTvar(Image, boolean),vlastnýTvar(KreslenieTvaru),Svet.priečinokObrázkov(String)
-
vlastnyTvar
public void vlastnyTvar(String súbor, boolean upravVeľkosťRobota)
Alias pre vlastnýTvar.
-
vlastnýTvar
public void vlastnýTvar(Image obrázok, boolean upravVeľkosťRobota)
Zmení tvar robota z klasického tvaru na zadaný obrázok. Ak bola predtým volaná metóda
vlastnýTvar(KreslenieTvaru tvar), tak ňou definované vlastné kreslenie bude zrušené. Ak je parameterupravVeľkosťRobotarovnýtrue, tak bude zároveň upravenáveľkosťrobota a to tak, aby zodpovedala priemeru šírky a výšky obrázka.Tip: Ak chcete kombinovať vlastné kreslenie tvaru s obrázkami, použite iba vlastné kreslenie tvaru robota používajúce rozhranie
KreslenieTvarua v tele metódykresliuvedeného rozhrania volajte metódu robotar.obrázok(obrázok).- Parametre:
obrázok– obrázok, ktorý má byť použitý namiesto predvoleného tvaru robotaupravVeľkosťRobota– hodnotatrueurčuje, že pred nastavením vlastného tvaru obrázka robota má byť upravená jeho veľkosť tak, aby zodpovedala priemeru šírky a výšky obrázka- Pozri tiež:
kresliTvar(),kresliSeba(),predvolenýTvar(),predvolenýVyplnenýTvar(),predvolenýDutýTvar(),predvolenýTvar(boolean),jePredvolenýTvarVyplnený(),vlastnýTvar(String),vlastnýTvar(Image),vlastnýTvar(String, boolean),vlastnýTvar(KreslenieTvaru)
-
vlastnyTvar
public void vlastnyTvar(Image obrázok, boolean upravVeľkosťRobota)
Alias pre vlastnýTvar.
-
vlastnýTvar
public void vlastnýTvar(KreslenieTvaru tvar)
Umožní kresliť vlastný tvar robota namiesto klasického tvaru. Metóda vyžaduje implementované rozhranie
KreslenieTvaru. Ak bola predtým volaná metódavlastnýTvar(String súbor)alebovlastnýTvar(Image obrázok), tak nimi definovaný obrázkový tvar bude zrušený.Volanie tejto metódy zruší vlastné kreslenie definované v prekrytej metóde
kresliTvaralebokresliSebaa to dokonca aj ak je zadaná hodnotanull. Hodnotanulltak umožňuje návrat kreslenia k originálnemu, skutočne predvolenému kresleniu tvaru robota (k trojzubcu). Ak chcete obnoviť mechanizmus kreslenia cez prekrytú metódukresliTvaralebokresliSeba, použite niektorú z verzií metódpredvolenýTvar.Tip: Ak chcete kombinovať vlastné kreslenie tvaru s obrázkami, použite iba vlastné kreslenie tvaru robota používajúce rozhranie
KreslenieTvarua v tele metódykresliuvedeného rozhrania volajte prislúchajúcu metódu robota:r.obrázok("názov súboru")alebor.obrázok(obrázok).- Parametre:
tvar– implementácia rozhraniaKreslenieTvaru- Pozri tiež:
KreslenieTvaru,kresliTvar(),kresliSeba(),predvolenýVyplnenýTvar(),predvolenýDutýTvar(),predvolenýTvar(),predvolenýTvar(boolean),jePredvolenýTvarVyplnený(),vlastnýTvar(String),vlastnýTvar(Image),vlastnýTvar(String, boolean),vlastnýTvar(Image, boolean)
-
vlastnyTvar
public void vlastnyTvar(KreslenieTvaru tvar)
Alias pre vlastnýTvar.
-
kresliTvary
public void kresliTvary()
Povolí kreslenie tvarov a písanie textov robotom (predvolený stav). Metóda je opakom metódy
nekresliTvary.Poznámka: Táto metóda spôsobí automatické prepustenie robota zo služieb kreslenia a tvorby oblasti.
Poznámka: Názov tejto metódy je podobný názvom metód v singulári
kresliTvar. Avšak tie slúžia na úplne iné účely. MetódakresliTvar()je určená na prekrytie a kreslenie vlastného tvaru robota. A novšie metódykresliTvar(tvar)akresliTvar(tvar, upravRobotom)sú určené na kreslenie obrysov tvarov Javy, ktoré mohli byť napríklad importované z SVG súboru.- Pozri tiež:
nekresliTvary(),kreslímTvary(),kružnica,kresliElipsu,kresliŠtvorec,kresliObdĺžnik,kresliHviezdu,text,cesta,položPero
-
kresliÚtvary
public void kresliÚtvary()
Alias pre kresliTvary.
-
kresliUtvary
public void kresliUtvary()
Alias pre kresliTvary.
-
nekresliTvary
public void nekresliTvary()
Zakáže kreslenie tvarov (kružnice, elipsy, štvorca, obdĺžnika…) a písanie textu robotom, aby prislúchajúce metódy mohli byť využité na iné účely, napríklad na obmedzenie kreslenia. Znamená to, že metódy na kreslenie útvarov a písanie textu robotom budú generovať tvary Javy (
Shape) bez ich vykreslenia na aktívne plátno robota. Kreslenie opäť povolíme metódoukresliTvary.Poznámka: Táto metóda spôsobí automatické prepustenie robota zo služieb kreslenia a tvorby oblasti.
- Pozri tiež:
kresliTvary(),kreslímTvary(),kružnica,kresliElipsu,kresliŠtvorec,kresliObdĺžnik,kresliHviezdu,text,cesta,zdvihniPero
-
nekresliÚtvary
public void nekresliÚtvary()
Alias pre nekresliTvary.
-
nekresliUtvary
public void nekresliUtvary()
Alias pre nekresliTvary.
-
kreslímTvary
public boolean kreslímTvary()
Zistí, či je kreslenie tvarov povolené alebo zakázané. Kreslenie mohlo byť povolené alebo zakázané metódami
kresliTvary, resp.nekresliTvary, prípadne iným mechanizmom).- Návratová hodnota:
true– kreslenie tvarov je povolené;false– kreslenie tvarov je zakázané- Pozri tiež:
kresliTvary(),nekresliTvary(),kružnica,kresliElipsu,kresliŠtvorec,kresliObdĺžnik,kresliHviezdu,text,cesta,polohaPera
-
kreslimTvary
public boolean kreslimTvary()
Alias pre kreslímTvary.
-
kreslenieTvarovPovolené
public boolean kreslenieTvarovPovolené()
Alias pre kreslímTvary.
-
kreslenieTvarovPovolene
public boolean kreslenieTvarovPovolene()
Alias pre kreslímTvary.
-
kresliVšade
public void kresliVšade()
Zruší oblasť na obmedzenie kreslenia na aktívne plátno (podlahu, strop alebo obrázok, do ktorého má robot presmerované kreslenie).
-
kresliVsade
public void kresliVsade()
Alias pre kresliVšade.
-
kresliDo
public void kresliDo(Shape tvar)
Obmedzí akékoľvek kreslenie na aktívne plátno robota (podlahu alebo strop) na plochu zadaného útvaru (
Shape).Robot disponuje množinou metód na kreslenie tvarov (
kružnica,elipsa,štvorec…), ktoré zároveň generujú tvary. Na ich použitie s touto metódou je dobré predtým kreslenie tvarov zakázať a neskôr opäť povoliť. Metódatextdokonca zákaz kreslenia tvarov požaduje, aby mohla vygenerovať tvar (bez zákazu má návratovú hodnotunull). Tvar je možné vytvoriť aj z cesty…Obmedzenie zužuje aktuálny priestor kreslenia, to znamená, že sa priebežne vytvára oblasť, ktorá je prienikom všetkých obmedzení. Ak chceme vytvoriť obmedzenie pre tvar, ktorý je možné vytvoriť inou množinovou operáciou, môžeme na obmedzenie kreslenia použiť
Oblasť(zadanú namiesto parametratvar). Je nevyhnutné podotknúť, že obmedzenie je viazané na plátno a je platné pre všetky roboty.Poznámka: Pri takomto orezávaní nie je na všetkých platformách a/alebo implementáciách virtuálneho stroja Javy dostupná funkcia anti-aliasingu, čo zjednodušene povedané znamená, že okraje orezanej kresby môžu byť „zúbkaté.“ Ak sa chcete tejto nedokonalosti vyhnúť, použite radšej funkciu masky. Tá dovoľuje ovplyvňovať úroveň priehľadnosti s jemnosťou na jednotlivé body rastra. (Poznámka: Naopak, pri exporte kreslenia do inštancie
SVGPodporaje výhodnejšie pracovať s orezávaním – čiže práve s touto metódou alebo jej variantmi.)- Parametre:
tvar– tvar (Shape) aleboOblasť- Pozri tiež:
Plátno.kresliDo(Shape),Obrázok.kresliDo(Shape),kresliVšade(),nekresliDo(Shape)
-
nekresliDo
public void nekresliDo(Shape tvar)
Vytvára obmedzenie na kreslenie na aktívne plátno robota (podlahu, strop alebo obrázok, do ktorého má robot presmerované kreslenie). Funguje rovnako ako metóda
kresliDo, ibaže obrátene – kreslenie je možné všade, okrem zadaného tvaru alebo oblasti.Rovnako ako pri metóde
kresliDo, sa aj toto obmedzenie kombinuje s aktuálnymi obmedzeniami na kreslenie a je platné pre všetky roboty.Poznámka: Pri takomto orezávaní nie je na všetkých platformách a/alebo implementáciách virtuálneho stroja Javy dostupná funkcia anti-aliasingu, čo zjednodušene povedané znamená, že okraje orezanej kresby môžu byť „zúbkaté.“ Ak sa chcete tejto nedokonalosti vyhnúť, použite radšej funkciu masky. Tá dovoľuje ovplyvňovať úroveň priehľadnosti s jemnosťou na jednotlivé body rastra. (Poznámka: Naopak, pri exporte kreslenia do inštancie
SVGPodporaje výhodnejšie pracovať s orezávaním – čiže práve s touto metódou alebo jej variantmi.)- Parametre:
tvar– tvar (Shape) aleboOblasť- Pozri tiež:
Plátno.nekresliDo(Shape),Obrázok.nekresliDo(Shape),kresliDo(Shape),kresliVšade()
-
vykonajPríkaz
public boolean vykonajPríkaz(String príkaz)
Táto metóda má rovnaké jadro ako mechanizmus vykonávania príkazov v interaktívnom režime a umožňuje používať príkazy, ktoré sú dostupné v tomto režime aj za jeho hranicami (t. j. bez nevyhnutnosti jeho aktivácie).
- Parametre:
príkaz– príkazový riadok spĺňajúci pravidlá uvedené v opise metódyinteraktívnyRežim- Návratová hodnota:
trueak bol príkaz nájdený a podarilo sa ho vykonať- Výnimky:
GRobotException– ak bolo vykonávanie príkazu zrušenéIllegalAccessException– ak metóda, s ktorou súvisí vykonávanie príkazu nie je dostupná (verejná)IllegalArgumentException– ak niektorý z argumentov metódy, s ktorou súvisí vykonávanie príkazu nie je požadovaného typu, ani ho na neho nie je možné previesťInvocationTargetException– ak pri vykonávní metódy, s ktorou súvisí vykonávanie príkazu vznikla výnimka- Pozri tiež:
Svet.vykonajPríkaz(String),Plátno.vykonajPríkaz(String),interaktívnyRežim(boolean),Svet.interaktívnyRežim(boolean),Plátno.interaktívnyRežim(boolean),Svet.režimLadenia(boolean)
-
vykonajPrikaz
public boolean vykonajPrikaz(String príkaz)
Alias pre vykonajPríkaz.
-
interaktívnyRežim
public void interaktívnyRežim(boolean zapni)
Zapne alebo vypne interaktívny režim pre tento robot. Pozri:
Svet.interaktívnyRežim(zapni).- Parametre:
zapni– ak jetrue, režim bude pre tento robot zapnutý, inak bude vypnutý- Pozri tiež:
Svet.interaktívnyRežim(boolean),Plátno.interaktívnyRežim(boolean),Svet.režimLadenia(boolean)
-
interaktivnyRezim
public void interaktivnyRezim(boolean zapni)
Alias pre interaktívnyRežim.
-
interaktívnyRežim
public boolean interaktívnyRežim()
Zistí stav interaktívneho režimu pre tento robot. Pozri:
Svet.interaktívnyRežim(zapni).- Návratová hodnota:
- stav režimu pre tento robot
-
interaktivnyRezim
public boolean interaktivnyRezim()
Alias pre interaktívnyRežim.
-
-