-
- Známe priame odvodené triedy:
- Oblast
public class Oblasť extends Area implements Poloha
Trieda je rozšírením triedy Javy
Area. Oblasť je ľubovoľná plocha, ktorá môže byť napríklad obkreslená čiarou, vyplnená farbou, použitá na obmedzenie kreslenia, prípadne na ďalšie účely. Na tvorbe oblasti sa môže podieľať zvolený robot alebo ju môžeme vytvoriť pomocou útvarov (Shape) Javy. Každý robot je schopný produkovať útvary, ktoré môžu byť využité na vytvorenie oblasti. Filozofia je taká, že zavoláme metódu robota na nakreslenie útvaru alebo výpis textu (ktoré zároveň produkujú útvary) a vyprodukovaný útvar (s jeho veľkosťou a orientáciou) pridáme či odoberieme od tvorenej oblasti, vytvoríme prienik alebo alternatívu s vytváranou oblasťou. Počas procesu tvorby oblasti by však bolo nežiaduce (prípadne nemožné[1]), aby robot súčasne produkované útvary kreslil[2]. Preto je dobré ho zamestnať na účely tvorby oblasti. Zamestnaný robot nekreslí útvary ani nepíše texty dovtedy, kým nie je zo služby uvoľnený (prepustený).[1] – to sa dotýka útvarov vytvorených z textu.
[2] – nemali by sme možnosť zabrániť nakresleniu produkovaného útvaru – zdvihnutie pera by nepomohlo, pretože jeho poloha nemá na kreslenie útvarov vplyv.Na tvorbu oblasti je možné použiť tieto metódy robota:
krúžok(polomer),kružnica(polomer),kruh(polomer),elipsa(a, b),kresliElipsu(a, b),vyplňElipsu(a, b),štvorec(polomer),kresliŠtvorec(polomer),vyplňŠtvorec(polomer),obdĺžnik(a, b),kresliObdĺžnik(a, b),vyplňObdĺžnik(a, b),hviezda(polomer),kresliHviezdu(polomer),vyplňHviezdu(polomer),cesta(),text(text)atext(text, spôsobKreslenia).Každá z nich môže byť argumentom metód
pridaj,odober,prienikaalternatíva.Príklad:
V tomto príklade sú oblasti použité na nakreslenie šrafovaného obrázka. Oblasti tu slúžia na vymedzenie plochy, do ktorej môže robot kresliť, vďaka čomu bude výsledkom kreslenia šrafov cez celú plochu plátna vyšrafovanie iba vymedzenej plochy.
importknižnica.*;publicclassŠrafovanýObrázokZOblastíextendsGRobot{// Konštruktor hlavného robota.privateŠrafovanýObrázokZOblastí() {// Volaním nadradeného konštruktora zmeníme romery plátna// (volanie nadradeného konštruktora musí byť prvým príkazom// každého nového konštruktora):super(600,400);// Pred začatím kreslenia vypneme automatické prekresľovanie,// aby bol celý proces rýchlejší:Svet.nekresli();// Najskôr zdvihneme pero a vypneme kreslenie tvarov robota,…zdvihniPero();nekresliTvary();// …aby sme mohli nerušene vygenerovať predlohy všetkých oblastí,// ktoré budeme používať pri kreslení šrafovaného obrázka:Oblasťkoruna1 =newOblasť(pootočenáElipsa(-100,80,0,50,100)); koruna1.pridaj(pootočenáElipsa(-70,70,0,30,80)); koruna1.pridaj(pootočenáElipsa(-140,60,0,30,60));Oblasťkmeň1 =newOblasť(kmeň(-100, -70,0,40,140)); kmeň1.odober(koruna1);Oblasťkoruna2 =newOblasť(pootočenáElipsa(140,70,0,40,80)); koruna2.pridaj(pootočenáElipsa(110,80,0,30,60)); koruna2.pridaj(pootočenáElipsa(180,60,0,30,50));Oblasťkmeň2 =newOblasť(kmeň(140, -60,0,30,120)); kmeň2.odober(koruna2);Oblasťkrík1 =newOblasť(pootočenáElipsa(25, -50,0,80,50)); krík1.pridaj(pootočenáElipsa(-5, -20,10,35,30)); krík1.pridaj(pootočenáElipsa(55, -20, -10,35,30)); krík1.pridaj(pootočenáElipsa(-35, -70,10,35,30)); krík1.pridaj(pootočenáElipsa(75, -70, -10,35,30));Oblasťkrík2 =newOblasť(pootočenáElipsa(275, -60,0,75,45)); krík2.pridaj(pootočenáElipsa(245, -30,10,30,25)); krík2.pridaj(pootočenáElipsa(305, -30, -10,30,25)); krík2.pridaj(pootočenáElipsa(215, -80,10,30,25)); krík2.pridaj(pootočenáElipsa(325, -80, -10,30,25));Oblasťkrík3 =newOblasť(pootočenáElipsa(-265, -80,0,75,45)); krík3.pridaj(pootočenáElipsa(-235, -50,10,30,25)); krík3.pridaj(pootočenáElipsa(-295, -50, -10,30,25)); krík3.pridaj(pootočenáElipsa(-205, -100,10,30,25)); krík3.pridaj(pootočenáElipsa(-315, -100, -10,30,25));Oblasťhorizont = horizont();Oblasťslnko = kružnicaNa(280,200,80);Oblasťoblak = oblak();
// (Všimnite si, že od oblasti zeme a oblohy musíme odčítať všetky// také oblasti, ktoré ich prekrývajú, inak by šrafovanie zasiahlo// aj do nich.)Oblasťzem =newOblasť(horizont); zem.odober(koruna1); zem.odober(kmeň1); zem.odober(koruna2); zem.odober(kmeň2); zem.odober(krík1); zem.odober(krík2); zem.odober(krík3);// Počiatočný tvar oblasti oblohy získame odčítaním oblasti// horizontu od obdĺžnika prekrývajúceho celé plátno (zasahujúc// mierne za jeho hranice):domov();Oblasťobloha =newOblasť(obdĺžnik(310,210)); obloha.odober(horizont);// (Potom pokračujeme odčítavaním oblastí tvarov, ktoré oblohu// prekrývajú – ako je napísané vyššie.)obloha.odober(koruna1); obloha.odober(kmeň1); obloha.odober(koruna2); obloha.odober(kmeň2); obloha.odober(krík1); obloha.odober(krík2); obloha.odober(krík3); obloha.odober(slnko); obloha.odober(oblak);
// Pred šrafovaním položíme pero:položPero();
// A vyšrafujeme a obkreslíme jednotlivé oblasti:kresliDo(koruna1); šrafovanie3();kresliVšade(); koruna1.kresli(this);// <-- toto znamená, že koruna1 bude// nakreslená „týmto“ (this), to jest// aktuálnym robotomkresliDo(kmeň1); šrafovanie4();kresliVšade(); kmeň1.kresli(this);kresliDo(koruna2); šrafovanie4();kresliVšade(); koruna2.kresli(this);kresliDo(kmeň2); šrafovanie3();kresliVšade(); kmeň2.kresli(this);
kresliDo(krík1); šrafovanie3(); šrafovanie4();kresliVšade(); krík1.kresli(this);kresliDo(krík2); šrafovanie3(); šrafovanie4();kresliVšade(); krík2.kresli(this);kresliDo(krík3); šrafovanie3(); šrafovanie4();kresliVšade(); krík3.kresli(this);
kresliDo(zem); šrafovanie1();kresliVšade(); zem.kresli(this);kresliDo(obloha); šrafovanie2();kresliVšade(); obloha.kresli(this);
kresliDo(slnko); šrafovanie3();kresliVšade(); slnko.kresli(this);kresliDo(oblak); šrafovanie4();kresliVšade(); oblak.kresli(this);
// Obrázok je hotový, spätne zapneme prekresľovanie:Svet.kresli(); }
// Šrafovanie vo vertikálnom (zvislom) smere.// (Implementácia sa spolieha na presné rozmery plátna: 600 × 400 bodov.)privatevoidšrafovanie1() {smer(90);for(inti =0; i <41; ++i) {skočNa(-300+ i *15, -200);dopredu(400); } }// Šrafovanie v horizontálnom (vodorovnom) smere.// (Implementácia sa spolieha na presné rozmery plátna: 600 × 400 bodov.)privatevoidšrafovanie2() {smer(0);for(inti =0; i <28; ++i) {skočNa(-300, -200+ i *15);dopredu(600); } }// Šrafovanie v diagonálnom smere 45° (zospodu zľava hore doprava).// (Implementácia sa spolieha na presné rozmery plátna: 600 × 400 bodov.)privatevoidšrafovanie3() {smer(45);for(inti =0; i <68; ++i) {skočNa(300- i *15, -200);dopredu(580); } }// Šrafovanie v diagonálnom smere 135° (zospodu sprava hore doľava).// (Implementácia sa spolieha na presné rozmery plátna: 600 × 400 bodov.)privatevoidšrafovanie4() {smer(135);for(inti =0; i <68; ++i) {skočNa(-300+ i *15, -200);dopredu(580); } }
// Nasledujúca metóda slúži na vygenerovanie oblasti v tvare pootočenej// elipsy (so stanovením jej rozmerov).// sx – x-ová súradnica stredu elipsy// sy – y-ová súradnica stredu elipsy// α – uhol pootočenia elipsy// a – veľkosť hlavnej poloosi elipsy// b – veľkosť vedľajšej poloosi elipsyprivateOblasť pootočenáElipsa(doublesx,doublesy,doubleα,doublea,doubleb) {skočNa(sx, sy);smer(90+ α);returnnewOblasť(elipsa(a, b)); }// Nasledujúca metóda slúži na vygenerovanie oblasti, ktorú ohraničuje// kružnica s určením jej stredu (a samozrejme i polomeru).// sx – x-ová súradnica stredu kružnice// sy – y-ová súradnica stredu kružnice// r – polomer kružniceprivateOblasťkružnicaNa(doublesx,doublesy,doubler) {skočNa(sx, sy);returnnewOblasť(kružnica(r)); }
// Nasledujúca metóda slúži na vygenerovanie tvaru nazvaného kmeň. Ide// o tvar získaný odrezaním plôšok z dvoch protiľahlých strán obdĺžnika,// pričom plôšky sú určené oblúčikmi tak, že v podstate vymedzujú// kruhové odseky. Tento tvar dokážeme získať rôznymi spôsobmi, ale// v tomto príklade ho vytvárame z cesty (čiže akoby zo záznamu dráhy,// ktorú robot prechádza), pričom okrem priamočiareho kráčania// použijeme aj príkazy robota na kráčanie po oblúku.// sx – x-ová súradnica stredu kmeňa// sy – y-ová súradnica stredu kmeňa// α – pootočenie tvaru kmeňa// š – šírka kmeňa// v – výška kmeňaprivateOblasťkmeň(doublesx,doublesy,doubleα,doubleš,doublev) {// Najprv treba vypočítať/získať súradnice rohov obdĺžnika// ohraničujúceho tvar kmeňa.// Prvým krokom je presun na súradnice stredu, pootočenie// a potom presun na súradnice ľavého dolného rohu kmeňa:skočNa(sx, sy);smer(90+ α);dozadu(v /2.0);posuňDoľava(š /2.0);// Potom pokračujeme postupným zapamätávaním aktuálnych súradníc// a pochodovanie po ohraničujúcom obdĺžniku, čím získavame súradnice// rohov obdĺžnika:BodvľavoDole =poloha();dopredu(v);BodvľavoHore =poloha();vpravo(90);dopredu(š);BodvpravoHore =poloha();vpravo(90);dopredu(v);BodvpravoDole =poloha();// Teraz môžeme začať kresliť tvar kmeňa. Najprv sa presunieme// do ľavého spodného rohu a pootočíme robot o 10° doprava vzhľadom// na počiatočné pootočenie, čiže presne na uhol 80° + α:skočNa(vľavoDole);smer(80+ α);// Zahájime záznam cesty a postupne sa rôznymi spôsobmi posúvame do// ďalších rohov ohraničujúceho obdĺžnika tak, aby sme získali// požadovaný tvar:začniCestu();choďNaPoOblúku(vľavoHore);choďNa(vpravoHore);smer(260+ α);choďNaPoOblúku(vpravoDole);// Nakoniec cestu zavrieme a výsledný tvar vrátime:uzavriCestu();returnnewOblasť(cesta()); }
// Tvar horizontu je vytvorený napevno ako obdĺžnik, ktorý je o niečo// širší ako šírka plátna, je tiež posunutý mierne pod úroveň rozmerov// plátna a namiesto hornej strany má čiaru vytvorenú z niekoľkých// oblúkov.// (Implementácia sa spolieha na presné rozmery plátna: 600 × 400 bodov.)privateOblasťhorizont() {skočNa(-310, -210);začniCestu();choďNa(-310, -80);smer(30);choďNaPoOblúku(50,0);choďNaPoOblúku(230, -50);choďNaPoOblúku(310, -50);choďNa(310, -210);uzavriCestu();returnnewOblasť(cesta()); }// Tvar oblaku je najkomplikovanejší z generovaných tvarov. Je// vytvorený zlúčením trojice „chumáčov“ rotovaných elíps. Tvar je// v tomto príklade vytvorený napevno. Keby sme ho chceli// parametrizovať (získať možnosť úpravy jeho polohy, prípadne// orientáciu a podobne), museli by sme sa zamerať na požadované// časti metódy – poloha chumáčov je nastavená pomocou trojice:// riadiaca štruktúra switch a volanie metód smer a dopredu;// s úpravou orientácie oblaku by to bolo komplikovanejšie, na to// by bolo potrebné metódu mierne prepracovať.privateOblasťoblak() {// Vytvorenie oblasti, do ktorej budú postupne zlučované všetky// vygenerované elipsy:Oblasťoblak =newOblasť();// Vonkajší cyklus určuje, že budú vygenerované tri „chumáče“ elíps:for(intj =0; j <3; ++j) {// Vnútorný cyklus určuje, že každý „chumáč“ bude pozostávať// z piatich elíps:for(inti =0; i <5; ++i) {// Toto vetvenie určuje stredy jednotlivých „chumáčov“:switch(j) {case0:skočNa(-280,200);break;case1:skočNa(-250,220);break;case2:skočNa(-220,200);break; }// Tieto dva príkazy rozmiestňujú elipsy v rámci jedného// „chumáča“:smer(75* i);dopredu(20);// Vygenerovanie elipsy a jej pridanie do oblasti:oblak.pridaj(elipsa(50,30)); } }// Vrátenie výsledného tvaru oblaku:returnoblak; }
// Hlavná metóda.publicstaticvoidmain(String... args) {Svet.použiKonfiguráciu("srafovany-obrazok-z-oblasti.cfg");newŠrafovanýObrázokZOblastí(); } }Výsledok:
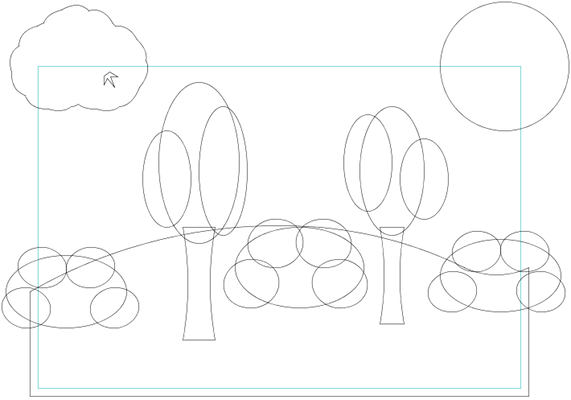
Skica obrázka – všetky použité tvary (len predlohy) s vyznačením plochy plátna (tyrkysovou farbou).
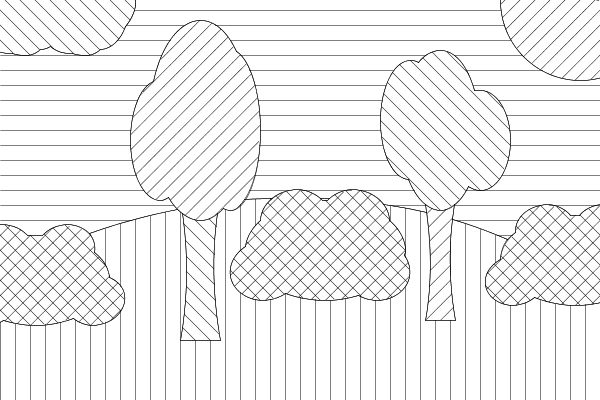
Výsledný vyšrafovaný obrázok.
Výsledok je vcelku uspokojivý. No čo ak by sme chceli štyri metódy na šrafovanie nahradiť jedinou univerzálnou? Metódou, ktorá by dovoľovala určiť šírku šrafov a ich smer?
Poznámka: Zachováme spôsob prešrafovania celej plochy plátna, pretože tento spôsob dokáže bez dodatočných úprav v algoritme zabezpečiť univerzálne polohovanie šrafov v rôznych tvaroch pri zadaní rovnakých parametrov rozostupu a smeru šrafovania. Ak by nám na univerálnom polohovaní nezáležalo (alebo by sme si ho boli ochotní algoritmicky doriešiť) a chceli by sme byť úsporní a prešrafovať len plochu šrafovanej oblasti, museli by sme zadať šrafovanú oblasť ako parameter metódy a potom by bolo treba: nahradiť zisťovanie šírky a výšky plátien šírkou a výškou oblasti, použiť príkaz na hľadanie vzdialenosti k stredu oblasti (resp. tvaru) a nahradiť alebo eliminovať príkaz prechodu na domovskú pozíciu robota, napríklad nahradiť ho príkazom prechodu (preskoku) do stredu oblasti alebo eliminovať ho zabezpečením tohto prechodu (do stredu oblasti) už na začiatku algoritmu a zisťovaním vzdialenosti k opačnému bodu vyšetrovanej pomyselnej úsečky – robot by sa potom už nemusel dodatočne nikam presúvať.
Takáto metóda je uvedená nižšie a funguje tak, že najskôr zistí rozsah šrafovania, presunie sa mimo šrafovanú plochu v určenom smere šrafovania a prešrafuje ju s použitím určeného rozostupu šrafov.
privatevoidšrafovanie(doublesmer,doublerozostup) {// Presun za hranice plôch plátien sveta (o vzdialenosť šírky// šrafovania v oboch smeroch osí súradnicovej sústavy do pravého// horného rohu plôch plátien) a zistenie vzdialenosti od stredu// súradnicovej sústavy. Táto vzdialenosť bude určovať rozsah// šrafovania od stredu šrafovanej plochy (t. j. celého plátna):skočNa(Svet.šírka() + rozostup,Svet.výška() + rozostup);doublerozsah =vzdialenosť();// Presun na začiatok (ak predpokladáme, že domovskú pozíciu// nebudeme meniť) a nasmerovanie sa do smeru šrafovania:domov();smer(smer);// Presun za hranice šrafovanej plochy o zistený rozsah:zdvihniPero();dozadu(rozsah);posuňVpravo(rozsah);// Postupné prešrafovanie celej plochy:for(doublel = -rozsah; l < rozsah; l += rozostup) {položPero();dopredu(2* rozsah);zdvihniPero();vzad(2* rozsah);posuňVľavo(rozostup); } }Skutočný priebeh šrafovania obdĺžnikového tvaru (napríklad celého plátna) v smere 72° a s rozostupom 4 body:
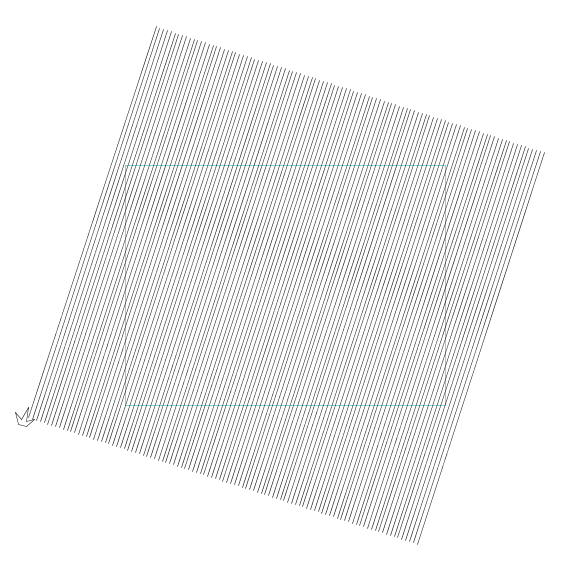
Skutočný priebeh šrafovania príkazomšrafovanie(72, 4)z nadhľadu – tyrkysový obdĺžnik vymedzuje plochu šrafovanej oblasti.Nižšie je obrázok šrafovaný metódami zhrnutými v nasledujúcej tabuľke:
Oblasť Príkazy koruna1šrafovanie(18, 12);
šrafovanie(-18, 12);kmeň1šrafovanie(72, 8);
šrafovanie(108, 8);koruna2šrafovanie(18, 12);
šrafovanie(-18, 12);kmeň2šrafovanie(72, 8);
šrafovanie(108, 8);Oblasť Príkaz krík1šrafovanie(90, 9);krík2šrafovanie(72, 9);krík3šrafovanie(108, 9);zemšrafovanie(30, 16);oblohašrafovanie(0, 18);slnkošrafovanie(45, 20);oblakšrafovanie(-45, 20);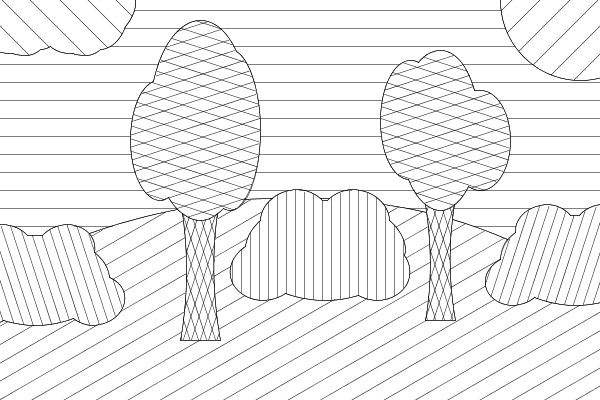
Výsledok šrafovania obrázka príkazmi uvedenými v tabuľke vyššie.Na záver niekoľko faktov o oblastiach a o ich vnútornej stavbe. Informácie vyplývajú aj z originálnej dokumentácie triedy
Area(pozri odkaz nižšie). Oblasť tvorí vždy uzavretý útvar (obopína vždy nejakú plochu po celom jej obvode). Aj keď bola vytvorená z tvaru, ktorý pôvodne nebol je uzavretý (napríklad neuzavretácesta). Ak sa pokúsime vytvoriť oblasť z útvaru, ktorý „nemá“ (neobopína) žiadnu plochu (napríklad úsečka), získame prázdnu oblasť. Aj keď útvary, z ktorých oblasť tvoríme, sú jednoduché, výsledná oblasť nikdy nie je v skutočnosti taká jednoduchá. Napríklad kružnica alebo elipsa sú na pohľad jednoduché, ale z nich vytvorená oblasť bude vždy tvorená viacerými segmentami (v tomto prípade krivkami). Zložitosť oblasti má vplyv na rýchlosť spracovania pri jej použití v programe, najmä na detekciu kolízií.- Pozri tiež:
Area
-
-
Prehľad konštruktorov
Konštruktory Konštruktor a opis Oblasť()Predvolený konštruktor.Oblasť(GRobot zamestnanec)Vytvorí prázdnu oblasť so zadaným zamestnancom.Oblasť(Shape tvar)Vytvorí oblasť z určeného tvaru.Oblasť(Shape tvar, GRobot zamestnanec)Vytvorí oblasť z určeného tvaru a so zadaným zamestnancom.
-
Prehľad metód
Všetky metódy Inštančné metódy Skutočne definované metódy Modifikátor a typ Metóda a opis voidalternativa(Shape tvar) Alias pre
Alias pre alternatíva.voidalternatíva(Shape tvar)Vytvorí z oblasti a zadaného tvaru alternatívu – XOR (vylučujúce alebo, buď/alebo).booleanbodV(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú v tejto oblasti.booleanbodV(Poloha r)Zistí, či sa bod polohy robota nachádza v tejto oblasti.booleanjeNa(double x, double y)Overí, či sa poloha tejto oblasti (t. j. súradníc jej stredu) dokonale zhoduje so zadanými súradnicami.booleanjeNa(Poloha poloha)Overí, či sa poloha tejto oblasti (t. j. súradníc jej stredu) a poloha zadaného objektu dokonale zhodujú.voidkresli()Nakreslí túto oblasť s využitím zamestnaného robota (použije jeho farbu alebo náter, hrúbku pera a aktívne plátno).voidkresli(GRobot r)Nakreslí túto oblasť na aktívne plátno aktuálnou farbou (alebo náterom) a hrúbkou pera zadaného robota.booleanmysV() Alias pre myšV.booleanmyšV()Zistí, či sa aktuálne súradnice myši nachádzajú v tejto oblasti.voidodober(Shape tvar)Odoberie z oblasti zadaný tvar.Bodpoloha()Vypočíta a vráti polohu stredu oblasti.doublepolohaX()Vypočíta a vráti x-ovú súradnicu polohy stredu oblasti.doublepolohaY()Vypočíta a vráti y-ovú súradnicu polohy stredu oblasti.booleanprazdna() Alias pre prázdna.booleanprázdna()Zistí, či je táto oblasť prázdna – t. j. či obopína nejakú plochu.voidprepusti() Alias pre uvoľni.voidprepusti(GRobot zamestnanec) Alias pre uvoľni.voidpridaj(Shape tvar)Pridá k oblasti zadaný tvar.voidprienik(Shape tvar)Vytvorí prienik oblasti a zadaného tvaru.doublesirka() Alias pre šírka.doublesuradnicaX() Alias pre súradnicaX.doublesúradnicaX()Vypočíta a vráti x-ovú súradnicu polohy stredu oblasti.doublesuradnicaY() Alias pre súradnicaY.doublesúradnicaY()Vypočíta a vráti y-ovú súradnicu polohy stredu oblasti.doublešírka()Vráti šírku oblasti.voiduvolni() Alias pre uvoľni.voiduvoľni()Automaticky uvoľní robot zamestnaný na účely tvorby (prípadne kreslenia) tejto oblasti.voiduvolni(GRobot zamestnanec) Alias pre uvoľni.voiduvoľni(GRobot zamestnanec)Uvoľní robot zamestnaný na účely tvorenia tejto oblasti.voidvymaz() Alias pre vymaž.voidvymaž()Kompletne odstráni geometriu oblasti – vyprázdni oblasť.voidvypln() Alias pre vyplň.voidvyplň()Vyplní plochu tejto oblasti s využitím zamestnaného robota (použije jeho farbu alebo náter a aktívne plátno).voidvypln(GRobot r) Alias pre vyplň.voidvyplň(GRobot r)Vyplní plochu tejto oblasti na aktívne plátno aktuálnou farbou (alebo náterom) zadaného robota.voidvypln(GRobot r, Image výplň) Alias pre vyplň.voidvyplň(GRobot r, Image výplň)Vyplní plochu tejto oblasti na aktívne plátno zadaného robota zadanou textúrou.voidvypln(GRobot r, String súbor) Alias pre vyplň.voidvyplň(GRobot r, String súbor)Vyplní plochu tejto oblasti na aktívne plátno zadaného robota zadanou textúrou.voidvypln(Image výplň) Alias pre vyplň.voidvyplň(Image výplň)Vyplní plochu tejto oblasti textúrou s využitím zamestnaného robota (použije jeho aktívne plátno).voidvypln(String súbor) Alias pre vyplň.voidvyplň(String súbor)Vyplní plochu tejto oblasti textúrou s využitím zamestnaného robota (použije jeho aktívne plátno).doublevyska() Alias pre výška.doublevýška()Vráti výšku oblasti.voidzamestnaj(GRobot zamestnanec)Zamestná zadaného robota na účely tvorby tejto oblasti.booleanzamestnany() Alias pre zamestnaný.booleanzamestnaný()Overí, či je pre túto oblasť zamestnaný ľubovoľný robot.booleanzamestnany(GRobot zamestnanec) Alias pre zamestnaný.booleanzamestnaný(GRobot zamestnanec)Overí, či je pre túto oblasť zamestnaný určený robot.-
Metódy zdedené z triedy java.awt.geom.Area
add, clone, contains, contains, contains, contains, createTransformedArea, equals, exclusiveOr, getBounds, getBounds2D, getPathIterator, getPathIterator, intersect, intersects, intersects, isEmpty, isPolygonal, isRectangular, isSingular, reset, subtract, transform
-
-
-
-
Podrobnosti konštruktorov
-
Oblasť
public Oblasť()
Predvolený konštruktor. Dovoľuje vytvoriť oblasť bez spresňujúcich parametrov.
-
Oblasť
public Oblasť(Shape tvar)
Vytvorí oblasť z určeného tvaru.
- Parametre:
tvar– ľubovoľný tvar Javy; ak sa chcete vyhnúť ťažkostiam s úpravou súradnicového priestoru, odporúčame na generovanie tvarov používať metódy robota (pozri úvod), najlepšie toho, ktorý bol na účely tvorby tejto oblasti zamestnaný
-
Oblasť
public Oblasť(GRobot zamestnanec)
Vytvorí prázdnu oblasť so zadaným zamestnancom. Pre podrobnosti o zamestnancovi pozri metódu
zamestnaj.- Parametre:
zamestnanec– robot, ktorý má byť použitý na účely tvorby tejto oblasti (prípadne na jej nakreslenie)- Výnimky:
GRobotException– ak je stanovený robot zamestnaný pre inú oblasť
-
Oblasť
public Oblasť(Shape tvar, GRobot zamestnanec)
Vytvorí oblasť z určeného tvaru a so zadaným zamestnancom. Pre podrobnosti o zamestnancovi pozri metódu
zamestnaj.- Parametre:
tvar– ľubovoľný tvar Javy; ak sa chcete vyhnúť ťažkostiam s úpravou súradnicového priestoru, odporúčame na generovanie tvarov používať metódy robota (pozri úvod), najlepšie toho, ktorý bol na účely tvorby tejto oblasti zamestnanýzamestnanec– robot, ktorý má byť použitý na účely tvorby tejto oblasti (prípadne na jej nakreslenie)- Výnimky:
GRobotException– ak je stanovený robot zamestnaný pre inú oblasť
-
-
Podrobnosti metód
-
prázdna
public boolean prázdna()
Zistí, či je táto oblasť prázdna – t. j. či obopína nejakú plochu.
- Návratová hodnota:
trueak je táto oblasť prázdna (netvorí/neobsahuje žiadny útvar); inakfalse
-
prazdna
public boolean prazdna()
Alias pre prázdna.
-
zamestnaj
public void zamestnaj(GRobot zamestnanec)
Zamestná zadaného robota na účely tvorby tejto oblasti. Oblasť môže byť vytvorená aj bez pomoci robota (prostriedkami Javy), avšak na využitie možností robota, je jednoduchšie zamestnať robot, ktorý pomôže vytvoriť oblasť pomocou svojich prostriedkov na kreslenie útvarov a písanie textov (resp. „kreslenie“ textov). Každý robot stráca súčasne so zamestnaním schopnosť kreslenia a vypĺňania útvarov (okrem kreslenia a vypĺňania cesty) a písania textov. Je to z dôvodu presunutia týchto schopností do tvorby oblasti… Po prepustení robota zo služby sa jeho schopnosti automaticky obnovia.
Robot nesmie byť zamestnaný pre inú oblasť, lebo vznikne výnimka.
Na tvorbu oblasti je možné použiť tieto metódy robota:
krúžok(polomer),kružnica(polomer),kruh(polomer),elipsa(a, b),kresliElipsu(a, b),vyplňElipsu(a, b),štvorec(polomer),kresliŠtvorec(polomer),vyplňŠtvorec(polomer),obdĺžnik(a, b),kresliObdĺžnik(a, b),vyplňObdĺžnik(a, b),hviezda(polomer),kresliHviezdu(polomer),vyplňHviezdu(polomer),cesta(),text(text)atext(text, spôsobKreslenia).Každá z nich môže byť argumentom metód
pridaj,odober,prienikaalternatíva.- Parametre:
zamestnanec– robot, ktorý má byť použitý na účely tvorby tejto oblasti (prípadne na jej nakreslenie)- Výnimky:
GRobotException– ak je robot zamestnaný pre inú oblasť
-
uvoľni
public void uvoľni()
Automaticky uvoľní robot zamestnaný na účely tvorby (prípadne kreslenia) tejto oblasti. Ak taký robot nejestvuje, volanie metódy nemá žiadny efekt.
Poznámka: Názov
uvoľnimá v programovacom rámci GRobot deväť rôznych metód:GRobot.uvoľni(),GRobot.uvoľni(Oblasť),Oblasť.uvoľni(),Oblasť.uvoľni(GRobot)– slúžia na uvoľnenie robota zo zamestnania pre stanovenú oblasť (čo je geometrická trieda),Svet.uvoľni()– slúži na uvoľnenie hlavného okna sveta, t. j. umožnenie zmeny veľkosti okna používateľovi (ide o opak metódySvet.upevni) a nakoniecSvet.uvoľni(GRobot),Svet.uvoľni(Class),Svet.uvoľni(Plazma)Svet.uvoľni(Obrázok)aSvet.uvoľni(String)– slúžia na uvoľňovanie nepotrebných inštancií robotov, vytvorených alebo prečítaných obrázkov a prečítaných zvukov z vnútorných zoznamov zdrojov (robotov, obrázkov, zvukov), čo je jednak nevyhnutnou podmienkou ich úspešného vymazania z pamäte zberačom odpadkov Javy a jednak to môže byť niekedy potrebné (napríklad ak sa obsah súboru so zdrojom uloženým na disku zmenil).- Pozri tiež:
uvoľni(GRobot),GRobot.uvoľni()
-
uvolni
public void uvolni()
Alias pre uvoľni.
-
prepusti
public void prepusti()
Alias pre uvoľni.
-
uvoľni
public void uvoľni(GRobot zamestnanec)
Uvoľní robot zamestnaný na účely tvorenia tejto oblasti. Ak zadaný robot nebol zamestnaný pre túto oblasť, volanie tejto metódy nemá žiadny efekt.
Poznámka: Názov
uvoľnimá v programovacom rámci GRobot deväť rôznych metód:GRobot.uvoľni(),GRobot.uvoľni(Oblasť),Oblasť.uvoľni(),Oblasť.uvoľni(GRobot)– slúžia na uvoľnenie robota zo zamestnania pre stanovenú oblasť (čo je geometrická trieda),Svet.uvoľni()– slúži na uvoľnenie hlavného okna sveta, t. j. umožnenie zmeny veľkosti okna používateľovi (ide o opak metódySvet.upevni) a nakoniecSvet.uvoľni(GRobot),Svet.uvoľni(Class),Svet.uvoľni(Plazma)Svet.uvoľni(Obrázok)aSvet.uvoľni(String)– slúžia na uvoľňovanie nepotrebných inštancií robotov, vytvorených alebo prečítaných obrázkov a prečítaných zvukov z vnútorných zoznamov zdrojov (robotov, obrázkov, zvukov), čo je jednak nevyhnutnou podmienkou ich úspešného vymazania z pamäte zberačom odpadkov Javy a jednak to môže byť niekedy potrebné (napríklad ak sa obsah súboru so zdrojom uloženým na disku zmenil).- Parametre:
zamestnanec– robot, ktorý bol zamestnaný pre túto oblasť- Pozri tiež:
uvoľni(),GRobot.uvoľni(Oblasť)
-
zamestnaný
public boolean zamestnaný()
Overí, či je pre túto oblasť zamestnaný ľubovoľný robot.
- Návratová hodnota:
true/false
-
zamestnany
public boolean zamestnany()
Alias pre zamestnaný.
-
zamestnaný
public boolean zamestnaný(GRobot zamestnanec)
Overí, či je pre túto oblasť zamestnaný určený robot.
- Parametre:
zamestnanec– vyšetrovaný robot- Návratová hodnota:
true/false
-
zamestnany
public boolean zamestnany(GRobot zamestnanec)
Alias pre zamestnaný.
-
pridaj
public void pridaj(Shape tvar)
Pridá k oblasti zadaný tvar.
- Parametre:
tvar– ľubovoľný tvar Javy; ak sa chcete vyhnúť ťažkostiam s úpravou súradnicového priestoru, odporúčame na generovanie tvarov používať metódy robota (pozri úvod), najlepšie toho, ktorý bol na účely tvorby tejto oblasti zamestnaný- Pozri tiež:
zamestnaj(GRobot)
-
odober
public void odober(Shape tvar)
Odoberie z oblasti zadaný tvar.
- Parametre:
tvar– ľubovoľný tvar Javy; ak sa chcete vyhnúť ťažkostiam s úpravou súradnicového priestoru, odporúčame na generovanie tvarov používať metódy robota (pozri úvod), najlepšie toho, ktorý bol na účely tvorby tejto oblasti zamestnaný- Pozri tiež:
zamestnaj(GRobot)
-
prienik
public void prienik(Shape tvar)
Vytvorí prienik oblasti a zadaného tvaru.
- Parametre:
tvar– ľubovoľný tvar Javy; ak sa chcete vyhnúť ťažkostiam s úpravou súradnicového priestoru, odporúčame na generovanie tvarov používať metódy robota (pozri úvod), najlepšie toho, ktorý bol na účely tvorby tejto oblasti zamestnaný- Pozri tiež:
zamestnaj(GRobot)
-
alternatíva
public void alternatíva(Shape tvar)
Vytvorí z oblasti a zadaného tvaru alternatívu – XOR (vylučujúce alebo, buď/alebo). Nová oblasť bude obsahovať také plochy, ktoré patrili buď výlučne do pôvodnej oblasti, alebo výlučne do zadaného tvaru.
- Parametre:
tvar– ľubovoľný tvar Javy; ak sa chcete vyhnúť ťažkostiam s úpravou súradnicového priestoru, odporúčame na generovanie tvarov používať metódy robota (pozri úvod), najlepšie toho, ktorý bol na účely tvorby tejto oblasti zamestnaný- Pozri tiež:
zamestnaj(GRobot)
-
alternativa
public void alternativa(Shape tvar)
Alias pre alternatíva.
-
vymaž
public void vymaž()
Kompletne odstráni geometriu oblasti – vyprázdni oblasť. Použiteľné pri recyklovaní objektu, keď vykonal prácu na ktorú bol určený…
-
vymaz
public void vymaz()
Alias pre vymaž.
-
kresli
public void kresli()
Nakreslí túto oblasť s využitím zamestnaného robota (použije jeho farbu alebo náter, hrúbku pera a aktívne plátno). Keď bol robot medzičasom uvoľnený zo služby, nebude mať volanie tejto metódy žiadny efekt. Volanie tejto metódy nakreslí oblasť tak, ako bola vytvorená. Keď chcete využiť aj aktuálnu polohu a rotáciu robota, volajte metódu
obkresliOblasť.
-
vyplň
public void vyplň()
Vyplní plochu tejto oblasti s využitím zamestnaného robota (použije jeho farbu alebo náter a aktívne plátno). Keď bol robot medzičasom uvoľnený zo služby, tak nemá volanie tejto metódy žiadny efekt. Volanie tejto metódy vyplní oblasť tak, ako bola vytvorená. Keď chcete využiť aj aktuálnu polohu a rotáciu robota, volajte metódu
vyplňOblasť.
-
vypln
public void vypln()
Alias pre vyplň.
-
vyplň
public void vyplň(String súbor)
Vyplní plochu tejto oblasti textúrou s využitím zamestnaného robota (použije jeho aktívne plátno). Keď bol robot medzičasom uvoľnený zo služby, tak nemá volanie tejto metódy žiadny efekt. Volanie tejto metódy vyplní oblasť tak, ako bola vytvorená. Keď chcete využiť aj aktuálnu polohu a rotáciu robota, volajte metódu
vyplňOblasť. Textúra je súbor s obrázkom, ktorý bude použitý na dlaždicové vyplnenie oblasti.Obrázok (výplne) prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)Poznámka: Parametre textúry sa dajú ovplyvňovať špeciálnymi príkazmi. Súvisí s nimi i predvolené správanie príkazov vypĺňania. Predvolený bod začiatku vypĺňania dlaždicami sa nachádza v strede plátna alebo vypĺňaného obrázka. Pozrite si aj opis metódy
posunutieVýplne, kde nájdete príklad použitia a odkazy na metódy upravujúce ďalšie parametre obrázkových výplní.- Parametre:
súbor– názov súboru s obrázkom textúry- Výnimky:
GRobotException– ak súbor s obrázkom nebol nájdený (identifikátorimageNotFound)- Pozri tiež:
Svet.priečinokObrázkov(String)
-
vyplň
public void vyplň(Image výplň)
Vyplní plochu tejto oblasti textúrou s využitím zamestnaného robota (použije jeho aktívne plátno). Keď bol robot medzičasom uvoľnený zo služby, tak nemá volanie tejto metódy žiadny efekt. Volanie tejto metódy vyplní oblasť tak, ako bola vytvorená. Keď chcete využiť aj aktuálnu polohu a rotáciu robota, volajte metódu
vyplňOblasť. Textúra je obrázok (objekt typuImagealebo odvodený), ktorý bude použitý na dlaždicové vyplnenie oblasti.Poznámka: Parametre textúry sa dajú ovplyvňovať špeciálnymi príkazmi. Súvisí s nimi i predvolené správanie príkazov vypĺňania. Predvolený bod začiatku vypĺňania dlaždicami sa nachádza v strede plátna alebo vypĺňaného obrázka. Pozrite si aj opis metódy
posunutieVýplne, kde nájdete príklad použitia a odkazy na metódy upravujúce ďalšie parametre obrázkových výplní.- Parametre:
výplň– obrázok s textúrou
-
kresli
public void kresli(GRobot r)
Nakreslí túto oblasť na aktívne plátno aktuálnou farbou (alebo náterom) a hrúbkou pera zadaného robota. Táto metóda nakreslí oblasť tak, ako bola vytvorená. Keď ju chcete rotovať a/alebo posúvať, použite metódu
obkresliOblasť.- Parametre:
r– robot, ktorý bude použitý na nakreslenie tejto oblasti (iba farba, hrúbka pera a aktívne plánto)
-
vyplň
public void vyplň(GRobot r)
Vyplní plochu tejto oblasti na aktívne plátno aktuálnou farbou (alebo náterom) zadaného robota. Táto metóda vyplní oblasť tak, ako bola vytvorená. Keď ju chcete rotovať a/alebo posúvať, použite metódu
vyplňOblasť.- Parametre:
r– robot, ktorý bude použitý na vyplnenie tejto oblasti (iba farba a aktívne plánto)
-
vyplň
public void vyplň(GRobot r, String súbor)
Vyplní plochu tejto oblasti na aktívne plátno zadaného robota zadanou textúrou. Táto metóda vyplní oblasť tak, ako bola vytvorená. Keď ju chcete rotovať a/alebo posúvať, použite metódu
vyplňOblasť. Textúra je súbor s obrázkom, ktorý bude použitý na dlaždicové vyplnenie oblasti.Obrázok (výplne) prečítaný zo súboru je chápaný ako zdroj a po prečítaní zostane uložený vo vnútornej pamäti sveta. Z nej môže byť v prípade potreby (napríklad ak sa obsah súboru na disku zmenil) odstránený metódou
Svet.uvoľni(názovZdroja). (Táto informácia je platná pre všetky metódy pracujúce s obrázkami alebo zvukmi, ktoré prijímajú názov súboru ako parameter.)- Parametre:
r– robot, ktorý bude použitý na vyplnenie tejto oblasti (iba aktívne plánto)súbor– názov súboru s obrázkom textúry- Výnimky:
GRobotException– ak súbor s obrázkom nebol nájdený (identifikátorimageNotFound)- Pozri tiež:
Svet.priečinokObrázkov(String)
-
vyplň
public void vyplň(GRobot r, Image výplň)
Vyplní plochu tejto oblasti na aktívne plátno zadaného robota zadanou textúrou. Táto metóda vyplní oblasť tak, ako bola vytvorená. Keď ju chcete rotovať a/alebo posúvať, použite metódu
vyplňOblasť. Textúra je obrázok (objekt typuImagealebo odvodený), ktorý bude použitý na dlaždicové vyplnenie oblasti.- Parametre:
r– robot, ktorý bude použitý na vyplnenie tejto oblasti (iba aktívne plánto)výplň– obrázok s textúrou
-
bodV
public boolean bodV(double súradnicaBoduX, double súradnicaBoduY)Zistí, či sa súradnice zadaného bodu nachádzajú v tejto oblasti. Metóda posudzuje oblasť tak, ako bola vytvorená. Keď chcete využiť rotáciu alebo posun niektorého robota, použite metódu
bodVOblasti.- Parametre:
súradnicaBoduX– x-ová súradnica bodusúradnicaBoduY– y-ová súradnica bodu- Návratová hodnota:
true– áno;false– nie
-
bodV
public boolean bodV(Poloha r)
Zistí, či sa bod polohy robota nachádza v tejto oblasti. Metóda posudzuje polohu bodu v oblasti v takom stave, ako bola vytvorená. Keď chcete využiť rotáciu alebo posun niektorého robota, použite metódu
bodVOblasti.- Parametre:
r– robot, ktorého poloha je vyšetrovaná- Návratová hodnota:
true– áno;false– nie
-
myšV
public boolean myšV()
Zistí, či sa aktuálne súradnice myši nachádzajú v tejto oblasti. Metóda posudzuje oblasť tak, ako bola vytvorená. Keď chcete využiť rotáciu alebo posun niektorého robota, použite metódu
myšVOblasti.- Návratová hodnota:
true– áno;false– nie
-
mysV
public boolean mysV()
Alias pre myšV.
-
polohaX
public double polohaX()
Vypočíta a vráti x-ovú súradnicu polohy stredu oblasti.
-
polohaY
public double polohaY()
Vypočíta a vráti y-ovú súradnicu polohy stredu oblasti.
-
súradnicaX
public double súradnicaX()
Vypočíta a vráti x-ovú súradnicu polohy stredu oblasti.
- Definované:
súradnicaXv rozhraníPoloha- Návratová hodnota:
- x-ová súradnica polohy stredu oblasti
-
suradnicaX
public double suradnicaX()
Alias pre súradnicaX.- Definované:
suradnicaXv rozhraníPoloha
-
súradnicaY
public double súradnicaY()
Vypočíta a vráti y-ovú súradnicu polohy stredu oblasti.
- Definované:
súradnicaYv rozhraníPoloha- Návratová hodnota:
- y-ová súradnica polohy stredu oblasti
-
suradnicaY
public double suradnicaY()
Alias pre súradnicaY.- Definované:
suradnicaYv rozhraníPoloha
-
poloha
public Bod poloha()
Vypočíta a vráti polohu stredu oblasti.
-
jeNa
public boolean jeNa(double x, double y)Overí, či sa poloha tejto oblasti (t. j. súradníc jej stredu) dokonale zhoduje so zadanými súradnicami. Ak je zistená zhoda, tak metóda vráti hodnotu
true, v opačnom prípade hodnotufalse.
-
jeNa
public boolean jeNa(Poloha poloha)
Overí, či sa poloha tejto oblasti (t. j. súradníc jej stredu) a poloha zadaného objektu dokonale zhodujú. Ak je zistená zhoda, tak metóda vráti hodnotu
true, v opačnom prípade hodnotufalse.
-
šírka
public double šírka()
Vráti šírku oblasti.
- Návratová hodnota:
- šírka oblasti
-
sirka
public double sirka()
Alias pre šírka.
-
výška
public double výška()
Vráti výšku oblasti.
- Návratová hodnota:
- výška oblasti
-
vyska
public double vyska()
Alias pre výška.
-
-