- java.lang.Object
-
- Roj
-
public class Roj extends Object
Táto trieda umožňuje definovať a pracovať so sériou bodov (zvaných roj) umiestnených v trojrozmernom priestore. Na zobrazenie scény roja je použitá bodová projekcia. Body môžu byť prepojené spojmi, čím môžu byť vytvárané drôtené modely a v každom bode môže byť definovaný objekt na nakreslenie, čím sa dajú vytvárať jednoduché 3D scény zložené z 2D kulís (pozri príklad kolotoča nižšie).
Súradnicový systém roja je orientovaný ľavotočivo, čiže keď sa pozrieme na plochu xy zvrchu tak, že y-ová os smeruje doprava (rastom kladných hodnôt), tak x-ová os smeruje hore (pozri obrázok nižšie). Alebo keď sa pozeráme na počiatok súradnicovej sústavy z oktetu všetkých troch kladných súradníc tak, že z-ová súradnica smeruje hore, tak x-ovú os máme po pravej ruke a y-ovú po ľavej (pozri obrázok nižšie).
Každý bod roja má definované množstvo atribútov, ktoré majú poskytovať čo najväčšiu flexibilitu. Väčšina z nich slúži na umiestnenie bodu do priestoru. Základná trojica atribútov sú pôvodné súradnice bodu v priestore [x0, y0, z0]. Z nich sú pomocou atribútov posunutia [dx, dy, dz], stredu rotácie [xs, ys, zs] a uhlov rotácie (alfa, beta, gama) vypočítané takzvané lokálne transformované súradnice v priestore [x1, y1, z1]. Ďalším krokom je výpočet takzvaných konečných súradníc [x2, y2, z2], čo sú globálne transformované súradnice, to jest riadia sa hodnotou aktuálnej transformačnej matice roja, ktorá je prepočítavaná z polohy a orientácie kamery (pozri napríklad:
nastavUhly,nastavStredOtáčania,nastavKameru), mierky, prípadne ďalších (automaticky zisťovaných) hodnôt. Posledným krokom je výpočet polohy bodu premietnutej na plátno [x3, y3] a korešpondujúceho faktora rozmeru objektu kresleného v konkrétnom bode z3.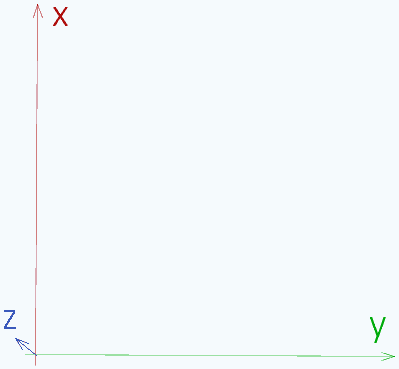
Ľavotočivý súradnicový systém pri pohľade „zvrchu.“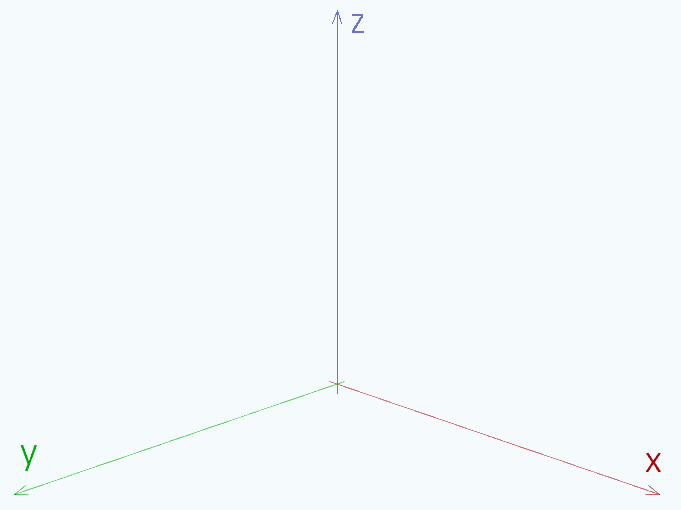
Ľavotočivý súradnicový systém pri pohľade „spredu.“V tomto balíčku (7z) je dostupný na prevzatie miniprojekt obsahujúci ovládač roja a od neho odvodenú jednoduchú triedu testu roja s niekoľkými príkladmi použitia roja.
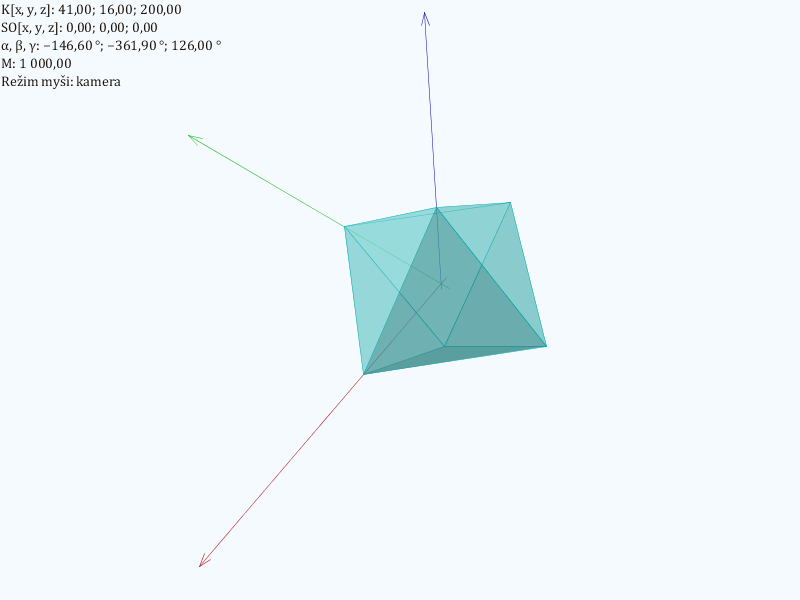
Ukážka možného výstupu príkladu testu roja s implementáciou ovládača roja.Na jeho základe je postavený nasledujúci príklad s kolotočom.
Príklad:
Tento príklad implementuje trojrozmernú kolotočovú ponuku zloženú z čiarových ikon vo formáte SVG.
importknižnica.*;importjava.awt.Shape;// SVG ikonky boli vyrobené (pomocou vektorového grafického editora// Inkscape) z bitmapovej verzie ikon voľne dostupných na webovej stránke:// https://icon-library.net/icon/menu-icon-png-3-lines-20.//// Ďalšie odporúčané zdroje://// • Výborný SVG tester: https://codepen.io/AmeliaBR/pen/JoYNEZ?editors=1000// • Coyier, Chris. 2018. The SVG ‘path’ Syntax : An Illustrated Guide.// ⟨https://css-tricks.com/svg-path-syntax-illustrated-guide/⟩.// • https://developer.mozilla.org/en-US/docs/Web/SVG/Tutorial/Paths// • https://developer.mozilla.org/en-US/docs/Web/SVG/Attribute/dpublicclassKolotočextendsGRobot{// Roj a príznak potreby jeho prekreslenia (po zmene parametrov):privateRojroj =newRoj(this);privatebooleanprekresliRoj =true;// Uhol jednotkového pootočenia kolotoča a aktuálne želaný uhol:privatedoubleΔu, želanýUhol =90.0;// Zoznam SVG súborov obsahujúcich SVG tvary ikoniek:privateString[] mená =newString[] {"ramcek.svg","spendlik.svg","hudba.svg","kompas.svg","film.svg","obrazok.svg","kalkulacka.svg","kava.svg","papiere.svg","zakladac.svg","mobilna-siet.svg","smernik.svg","kvapka.svg","sluchadlo.svg",// …};// Statická trieda zoskupujúca funkcionalitu prevodu čiarovej ikonky// vo formáte SVG do tvarov Javy.publicstaticclassIkonkaimplementsKreslenieTvaru{// Atribút na prepínanie zobrazenia ladiacich informácií:privatestaticbooleaninfo =false;// Vnútorné atribúty kreslenia ikonky:privateStringmeno;privateShape[] tvary;privateFarba[] výplne;privateFarba[] čiary;// Konštruktor ikonky.publicIkonka(Stringmeno) {this.meno = meno; SVGnaTvary(meno); }
// Metóda prevádzajúca tvary zo zadaného SVG súboru na tvary Javy.privatevoidSVGnaTvary(Stringmeno) {try{// Vyčistenie inštancie svgPodpora od predchádzajúceho// čítania:svgPodpora.vymaž();// Overenie, či bol súbor korektne prečítaný:if(-1==svgPodpora.čítaj(meno)) {// Predvolený tvar kružnice v prípade zlyhania čítania// súboru:tvary =newShape[] {newjava.awt.geom.Ellipse2D.Double(Svet.prepočítajX(-10),Svet.prepočítajY(10),20,20)}; výplne =newFarba[] {biela.priehľadnejšia(0.6)}; čiary =newFarba[] {ružová}; }else{// Získanie súradnice stredu:Bodstred =svgPodpora.stredKresby();// Výroba transformácie posunutia v súradnicovom// priestore Javy (tá sa nižšie použije na posunutie// všetkých tvarov):SVGPodpora.TransformáciaposunTam =newSVGPodpora.Transformácia(SVGPodpora.Transformácia.POSUN, -stred.polohaX(),stred.polohaY());// Uloženie počtu tvarov kresby do pomocnej premennej:intpočet =svgPodpora.počet();// Vytvorenie polí s prislúchajúcimi počtami prvkov:tvary =newShape[počet]; výplne =newFarba[počet]; čiary =newFarba[počet];// Pridanie transformácie ku každému tvaru a zároveň// overenie toho, či má byť tento tvar vypĺňaný, kreslený// (alebo oboje):for(inti =0; i < počet; ++i) {svgPodpora.pridajTransformácie(i, posunTam); tvary[i] =svgPodpora.dajVýsledný(i); výplne[i] =svgPodpora.farbaVýplne(i); čiary[i] =svgPodpora.farbaČiary(i); } } }catch(Exception e) {// (Toto nastane len výnimočne. Aj neprítomný alebo chybný// SVG súbor je signalizovaný inak: návratovou hodnotou// metódy čítaj.)e.printStackTrace(); } }// Kreslenie ikonky.publicvoidkresli(GRobotr) {// Všetky ikonky budú kreslené zvislo s hrúbkou čiary určenou// aktuálnou mierkou robota:r.uhol(90); r.hrúbkaČiary(r.mierka());
// Poznámka: Prispôsobenie (zmena) niektorých programátorom// vybraných farieb počas kreslenia ikoniek kolotoča je vhodné// potvrdiť práve na tomto mieste tak, že si farbu (alebo farby)// vopred zapamätáme do premennej a potom ňou (nimi) nahradíme// zvolenú kľúčovú farba (resp. farby) v kresbe. V tejto ukážke// (iba na ukážku) nahrádzame ružovú farbu robotom vopred// vygenerovanou náhodnou farbou. V dodaných SVG súboroch je// táto farba (opäť len na ukážku) použitá iba raz – v „bodke“// na obrázku mobilna-siet.svg. Môže však ísť o nahradenie// ľubovoľnej farby ľubovoľnou farbou. Môžu byť tiež využité// verejné atribúty farba a farbaSpoja aktuálne kresleného bodu// roja (pozri atribút Roj.bod). (Spoje i tak v tomto príklade// nevyužívame, tak môžeme využiť atribút rezervovaný na ich// zafarbovanie na vlastné účely.)r.náhodnáFarba();Farbaf = r.farba();
inti =0;for(Shapetvar : tvary) {if(null!= výplne[i]) {if(ružová.equals(výplne[i])) r.farba(f);elser.farba(výplne[i]); r.vyplňTvar(tvar,true); }if(null!= čiary[i]) {if(ružová.equals(čiary[i])) r.farba(f);elser.farba(čiary[i]); r.kresliTvar(tvar,true); } ++i; }// Ladiace informácie ikoniek (meno súboru nad ňou a mierka// pod ňou):if(info) { r.skoč(r.veľkosť() *1.5); r.text(meno); r.odskoč(r.veľkosť() *2.75); r.text(r.F(r.mierka(),2)); } } }
// Konštruktor celého kolotoča.privateKolotoč() {// Keby sme chceli mať predvolene zobrazené osi súradnicovej// sústavy (ktoré sú dobrou pomôckou pri ladení), volali by sme// na tomto mieste tento príkaz: osi();// Nastavenie predvolených vlastností roja (pri každom počte// bodov je potrebné tieto parametre „doladiť“ – najmä mierku):resetujRoj();// Poznámka: Rôzne hodnoty od predvolených majú len:// roj.mierka(500);// roj.nastavKameru(0, 50, 30);// Výpočet pomocných parametrov, pomocou ktorých vložíme// niekoľko bodov do roja:intn = mená.length;// počet bodovdoubler =15;// polomer kružnice, na ktorej budú umestnenéΔu =360.0/ n;// uhol otáčania smerníka (*)doubled = (2*Math.PI* r) / n;// dĺžka posunu smerníka (*)// (*) Smerník slúži na zjednodušenie vkladania bodov do roja.// Vypneme predvolené vkladanie spojov smerníkom:roj.smerník.vkladajSpoje=false;// Uloženie jedného smeru (vektora osi otáčania) do zásobníka, aby// sa dal použiť jednoduchší tvar volania metódy „otoč“ smerníka// (je to jednotkový vektor v smere osi z):roj.smerník.smerNa(0,0,1); roj.smerník.zálohujSmer();// Počiatočné nastavenie smerníka (smer je súhlasný so smerom// osi y a smerník je vysunutý o polomer otáčania v smere osi x):roj.smerník.smerNa(0,1,0); roj.smerník.posuň(-r,0,0);// Prvé pootočenie smerníka o polovicu uhla (voláme zjednodušený tvar// metódy „otoč,“ pretože smer osi otáčania určuje vektor uložený// v zásobníku; vyššie):roj.smerník.otoč(Δu /2.0);// Inak by bolo treba používať tento tvar volania metódy:// roj.smerník.otoč(0, 0, 1, -Δu / 2.0);// Cyklus vkladania bodov:for(inti =0; i < n; ++i) {// Pred každým vložením bodu potočíme smerník:roj.smerník.otoč(-Δu);// Alternatívne (bez vektora v zásobníku spomínaného vyššie)// by bolo treba použiť tento tvar príkazu:// roj.smerník.otoč(0, 0, 1, Δu);// Vložíme bod do roja a posunieme smerník:Roj.Bodbod = roj.smerník.pridajBod(); bod.kreslenie=newIkonka(mená[i]); roj.smerník.posuň(d); }skry();// (Skrytie hlavného robota.)// Keby bolo predvolene zapnuté zobrazenie ladiacich informácií// o roji (čo v tomto príklade nie je), tak by sme tu museli vykonať// prvé volanie (inak by boli po štarte skryté a zobrazili by sa až// po ľubovoľnej zmene zobrazenia roja): infoORoji();// Vypnutie automatického prekresľovania a zapnutie časovača:Svet.nekresli();Svet.spustiČasovač(); }
// Pomocné nástroje na definíciu a kreslenie (resp. skrývanie// a zobrazovanie) osí.// {{{// Koncové body osí:privateRoj.BodosX =null;privateRoj.BodosY =null;privateRoj.BodosZ =null;// Vlastný tvar na kreslenie šípky na konci osi.publicKreslenieTvarušípka = r -> { r.vpravo(18); r.vzad(14); r.zdvihniPero(); r.vpred(14); r.vľavo(36); r.položPero(); r.vzad(14); };// Definovanie alebo úprava dĺžky osi x.publicvoidosX(doubledĺžka) {if(null== osX) {Roj.Bodbod = roj.pridajBod(); bod.zobraz= bod.spoj=false; bod.x0= -2; bod.skupina=1; osX = roj.pridajBod(); osX.farba= osX.farbaSpoja=červená; osX.x0= dĺžka; osX.skupina=1; osX.kreslenie= šípka; }elseosX.x0= dĺžka; prekresliRoj =true; }// Zobrazenie/skrytie osi x.publicvoidosX(booleanzobraz) {if(null== osX) {if(zobraz) osX(30);elsereturn; } osX.zobraz= osX.spoj= zobraz; prekresliRoj =true; }// Overenie, či je os x zobrazená.publicbooleanosX() {if(null== osX)returnfalse;returnosX.spoj; }// Definovanie alebo úprava dĺžky osi y.publicvoidosY(doubledĺžka) {if(null== osZ) {Roj.Bodbod = roj.pridajBod(); bod.zobraz= bod.spoj=false; bod.y0= -2; bod.skupina=2; osY = roj.pridajBod(); osY.farba= osY.farbaSpoja=zelená; osY.y0= dĺžka; osY.skupina=2; osY.kreslenie= šípka; }elseosY.y0= dĺžka; prekresliRoj =true; }// Zobrazenie/skrytie osi y.publicvoidosY(booleanzobraz) {if(null== osY) {if(zobraz) osY(30);elsereturn; } osY.zobraz= osY.spoj= zobraz; prekresliRoj =true; }// Overenie, či je os y zobrazená.publicbooleanosY() {if(null== osY)returnfalse;returnosY.spoj; }// Definovanie alebo úprava dĺžky osi z.publicvoidosZ(doubledĺžka) {if(null== osZ) {Roj.Bodbod = roj.pridajBod(); bod.zobraz= bod.spoj=false; bod.z0= -2; bod.skupina=3; osZ = roj.pridajBod(); osZ.farba= osZ.farbaSpoja=modrá; osZ.z0= dĺžka; osZ.skupina=3; osZ.kreslenie= šípka; }elseosZ.z0= dĺžka; prekresliRoj =true; }// Zobrazenie/skrytie osi z.publicvoidosZ(booleanzobraz) {if(null== osZ) {if(zobraz) osZ(10);elsereturn; } osZ.zobraz= osZ.spoj= zobraz; prekresliRoj =true; }// Overenie, či je os z zobrazená.publicbooleanosZ() {if(null== osZ)returnfalse;returnosZ.spoj; }// Definovanie alebo úprava dĺžky všetkých troch osí naraz.publicvoidosi(doubledĺžkaX,doubledĺžkaY,doubledĺžkaZ) { osX(dĺžkaX); osY(dĺžkaY); osZ(dĺžkaZ); }// Zobrazenie/skrytie troch osí naraz.publicvoidosi(booleanzobraz) { osX(zobraz); osY(zobraz); osZ(zobraz); }// Zobrazenie (definovanie) všetkých troch osí s predvolenými// hodnotami dĺžok.publicvoidosi() { osi(30,30,10); }// }}}
// Hromadné úpravy roja a jeho bodov. (Reset a hromadné transformácie// používajúce vnútorné atribúty bodov, ktoré sú rezervované na tieto// účely. Niektoré z týchto metód sú určené len pre pomocné režimy// ladenia 5 a 6 tejto ukážky.)// {{{// Táto metóda slúži na rýchle nastavenie predvolených vlastností roja.// (Táto metóda je pravdepodobne jediná, ktorej obsahom sa treba// zaoberať pri redukcii príkladu – t. j. pri odstraňovaní kreslenia// osí a iných ladiacich informácií.)publicvoidresetujRoj() {// Toto sú síce predvolené vlastnosti roja, ale pri každom resete// ich potrebujeme vrátiť späť:roj.nastavUhly(-110, -360,45); roj.nastavStredOtáčania(0,0,0);// Nasledujúce dve vlastnosti upravujeme z predvolených hodnôt// (ktoré by boli: mierka = 1000; kamera = [0, -125, 200]) na také,// aké potrebujeme v našej ukážke:roj.mierka(500); roj.nastavKameru(0,50,30);// Nastavenie príznaku potrebnosti prekreslenia roja:prekresliRoj =true;// Predvolená hodnota želaného uhla:želanýUhol =270.0; }// Reset vnútorných individuálnych vlastností posunutia (dx až dz)// a pootočenia (alfa až gama) jednotlivých bodov roja.publicvoidresetujBody() {for(Roj.Bodbod : roj.body())if(1> bod.skupina||3< bod.skupina) { bod.dx= bod.dy= bod.dz=// bod.xs = bod.ys = bod.zs =bod.alfa= bod.beta= bod.gama=0.0; bod.transformuj=true; } roj.transformovať(); prekresliRoj =true; }// Posunutie pomocou vnútorných vlastností dx až dz bodov roja.publicvoidposuňBody(doubleΔx,doubleΔy,doubleΔz) {for(Roj.Bodbod : roj.body())if(1> bod.skupina||3< bod.skupina) { bod.dx+= Δx; bod.dy+= Δy; bod.dz+= Δz; bod.transformuj=true; } roj.transformovať(); prekresliRoj =true; }// Pootočenie pomocou vnútorných vlastností alfa až gama bodov roja.publicvoidpootočBody(doubleΔα,doubleΔβ,doubleΔγ) {for(Roj.Bodbod : roj.body())if(1> bod.skupina||3< bod.skupina) { bod.alfa+= Δα; bod.beta+= Δβ; bod.gama+= Δγ; bod.transformuj=true; } roj.transformovať(); prekresliRoj =true; }// }}}
// Ovládanie – režim ladenia.// {{{// Atribúty súvisiace s režimom ladenia.privateintrežim =3;privatestaticbooleaninfoORoji =false;privatedoublemyšX =0;privatedoublemyšY =0;// Výpis ladiacich informácií.publicvoidinfoORoji() {Svet.vymažTexty();if(0!= režim && infoORoji) {Svet.vypíšRiadok("K[x, y, z]: ",F(roj.kameraX(),2),"; ",F(roj.kameraY(),2),"; ",F(roj.kameraZ(),2));Svet.vypíšRiadok("SO[x, y, z]: ",F(roj.stredOtáčaniaX(),2),"; ",F(roj.stredOtáčaniaY(),2),"; ",F(roj.stredOtáčaniaZ(),2));Svet.vypíšRiadok("α, β, γ: ",F(roj.uholAlfa(),2) +"°; ",F(roj.uholBeta(),2) +"°; ",F(roj.uholGama(),2) +"°");Svet.vypíšRiadok("M: ",F(roj.mierka(),2));Svet.vypíš("Režim myši: ");switch(režim) {case1:Svet.vypíšRiadok("kamera");break;case2:Svet.vypíšRiadok("stred otáčania");break;case3:Svet.vypíšRiadok("uhly rotácie");break;case4:Svet.vypíšRiadok("mierka");break;case5:Svet.vypíšRiadok("posunutie bodov");break;case6:Svet.vypíšRiadok("pootočenie bodov");break; }Svet.vypíšRiadok(riadok,"Želaný uhol: ", želanýUhol);Svet.vypíšRiadok("Uhol pootočenia: ", Δu);intpoložka = čísloPoložky();if(položka <0|| položka >= mená.length)Svet.vypíšRiadok("Neznáme číslo položky: ", položka);elseSvet.vypíšRiadok("Zvolená položka ", položka,": ", mená[položka]); } }// Rozšírenie ovládania klávesnicou pre režim ladenia.publicvoidpriUvoľneníKlávesu() {switch(ÚdajeUdalostí.kláves()) {caseKláves.VK_0: režim =0;break;caseKláves.VK_1: režim =1;break;caseKláves.VK_2: režim =2;break;caseKláves.VK_3: režim =3;break;caseKláves.VK_4: režim =4;break;caseKláves.VK_5: režim =5;break;caseKláves.VK_6: režim =6;break;caseKláves.VK_I: infoORoji = !infoORoji;break;caseKláves.VK_O: Ikonka.info = !Ikonka.info; prekresliRoj =true;break;caseKláves.VK_S: osi(!osX());break;caseKláves.MEDZERA: resetujRoj(); resetujBody();break; } infoORoji(); }// Ovládanie myšou v režime ladenia – akcia vykonaná pri stlačení// ľubovoľného tlačidla myši.@OverridepublicvoidstlačenieTlačidlaMyši() {// if (tlačidloMyši(ĽAVÉ)) {} else {}myšX =ÚdajeUdalostí.polohaMyšiX(); myšY =ÚdajeUdalostí.polohaMyšiY(); }// Ovládanie myšou v režime ladenia – akcia vykonaná pri ťahaní// myšou (t. j. pohybe myšou počas držania ľubovoľného tlačidla).@OverridepublicvoidťahanieMyšou() {// (Rozlišuje sa akcia stlačenia ľavého a „iného“ tlačidla…)if(ÚdajeUdalostí.tlačidloMyši(ĽAVÉ)) {switch(režim) {case1: roj.posuňKameru(ÚdajeUdalostí.polohaMyšiX() - myšX,ÚdajeUdalostí.polohaMyšiY() - myšY,0.0);break;case2: roj.posuňStredOtáčania(ÚdajeUdalostí.polohaMyšiX() - myšX,ÚdajeUdalostí.polohaMyšiY() - myšY,0.0);break;case3:if(ÚdajeUdalostí.myš().isControlDown()) {if(ÚdajeUdalostí.myš().isShiftDown()) roj.pootoč(0.0, (ÚdajeUdalostí.polohaMyšiX() - myšX +ÚdajeUdalostí.polohaMyšiY() - myšY) /10.0,0.0);elseroj.pootoč((ÚdajeUdalostí.polohaMyšiX() - myšX +ÚdajeUdalostí.polohaMyšiY() - myšY) /10.0,0.0,0.0); }elseroj.pootoč( (ÚdajeUdalostí.polohaMyšiY() - myšY) /10.0, (ÚdajeUdalostí.polohaMyšiX() - myšX) /10.0,0.0);break;case4: roj.zmeňMierku( (myšX -ÚdajeUdalostí.polohaMyšiX()) /10.0+ (myšY -ÚdajeUdalostí.polohaMyšiY()) /1.0);break;case5: posuňBody( (ÚdajeUdalostí.polohaMyšiX() - myšX) /10.0, (myšY -ÚdajeUdalostí.polohaMyšiY()) /10.0,0);break;case6: pootočBody( (ÚdajeUdalostí.polohaMyšiY() - myšY) /10.0, (ÚdajeUdalostí.polohaMyšiX() - myšX) /10.0,0);break; } }else{switch(režim) {case1: roj.posuňKameru(0.0,0.0, ((myšX -ÚdajeUdalostí.polohaMyšiX()) /100.0) + ((myšY -ÚdajeUdalostí.polohaMyšiY()) /10.0));break;case2: roj.posuňStredOtáčania(0.0,0.0, myšY -ÚdajeUdalostí.polohaMyšiY());break;case3: roj.pootoč(0.0,0.0, (ÚdajeUdalostí.polohaMyšiX() - myšX +ÚdajeUdalostí.polohaMyšiY() - myšY) /10.0);break;case4: roj.zmeňMierku( (myšX -ÚdajeUdalostí.polohaMyšiX()) /1000.0+ (myšY -ÚdajeUdalostí.polohaMyšiY()) /100.0);break;case5: posuňBody(0,0, (ÚdajeUdalostí.polohaMyšiX() - myšX) /100.0+ (ÚdajeUdalostí.polohaMyšiY() - myšY) /10.0);break;case6: pootočBody(0,0,(ÚdajeUdalostí.polohaMyšiX() - myšX +ÚdajeUdalostí.polohaMyšiY() - myšY) /10.0);break; } } myšX =ÚdajeUdalostí.polohaMyšiX(); myšY =ÚdajeUdalostí.polohaMyšiY(); prekresliRoj =true; infoORoji();Svet.prekresli(); }// Kreslenie vlastného tvaru robota (ktoré by bolo predvoleným tvarom// tých bodov roja, ktoré by nemali definovaný žiadny vlastný tvar).// V tomto príklade je to zariadené tak, že volanie tejto metódy by// nemalo nikdy nastať. Je definovaná v podstate len „pre istotu.“@OverridepublicvoidkresliSeba() {krúžok(); }
// V tomto komentári sa nachádza krátka sekcia vytvorená na ladiace// účely, ktorá pri pohybe kurzorom myši (výhradne pri pohybe kurzorom// myši) overí prítomnosť kurzora nad niektorým bodom roja a v prípade// nájdenia takéhoto bodu nad ním nachvíľu zobrazí červenú kružnicu// (realizovanú prostredníctvom jednoúčelového robota uloženého// v inštancii zvýrazniť).//// private GRobot zvýrazniť = null;// @Override public void pohybMyši()// {// Roj.Bod bod = null == roj ? null : roj.dajBodNaMyši();// if (null == bod)// {// if (null != zvýrazniť) zvýrazniť.skry();// }// else// {// if (null == zvýrazniť)// {// zvýrazniť = new GRobot()// {// @Override public void deaktivácia() { skry(); }// @Override public void aktivácia() { zobraz(); }// };//// zvýrazniť.vlastnýTvar(r -> r.krúžok());// zvýrazniť.farba(červená);// zvýrazniť.hrúbkaČiary(3);// zvýrazniť.vrstva(1);// }//// zvýrazniť.skočNa(bod.x3, bod.y3);// zvýrazniť.veľkosť(bod.z3);// zvýrazniť.aktivuj(10);// }// }// }}}
// Pomocná metóda zisťujúca, ktorá ikonka je v popredí (podľa želaného// uhla pootočenia roja podľa osi z, ktorý je uložený v prislúchajúcom// atribúte tejto triedy).privateintčísloPoložky() {doubleuhol = (želanýUhol +90+ Δu /2) %360.0;if(uhol <0) uhol +=360.0;return(int)(uhol / Δu); }// Pomocná metóda určená na rozšírenie a na vykonanie prislúchajúcej// akcie podľa „aktuálneho“ čísla položky (zisteného metódou vyššie).privatevoidpotvrdeniePoložky() {intpoložka = čísloPoložky();if(položka <0|| položka >= mená.length)Svet.chyba("Neznáme číslo položky: "+ položka);elseSvet.správa("Zvolená položka "+ položka +": "+ mená[položka]); }// Ovládanie kolotoča klávesnicou.@OverridepublicvoiduvoľnenieKlávesu() {switch(ÚdajeUdalostí.kláves()) {caseKláves.VPRAVO: želanýUhol += Δu;break;caseKláves.VĽAVO: želanýUhol -= Δu;break;caseKláves.ENTER: potvrdeniePoložky();break;default: priUvoľneníKlávesu(); } }// Alternatívny spôsob aktivovania položky – klikom myši.@Overridepublicvoidklik() {// Prevzatie bodu na myši.Roj.Bodbod =null== roj ?null: roj.dajBodNaMyši();if(null!= bod &&null!= bod.kreslenie&& bod.kreslenieinstanceofIkonka) {// Získanie „mena“ bodu (resp. názvu SVG súboru).Stringmeno = ((Ikonka)bod.kreslenie).meno;// Zistenie indexu položky kolotoča podľa jej „mena.“intindexOf = -1;for(inti =0; i < mená.length; ++i)if(mená[i].equals(meno)) { indexOf = i;break; }if(-1!= indexOf) {// „Aktivácia“ položky rolovaním na ňu.if(ÚdajeUdalostí.polohaMyšiX() >=0)for(inti =0; čísloPoložky() != indexOf && i < mená.length; ++i) želanýUhol += Δu;elsefor(inti =0; čísloPoložky() != indexOf && i < mená.length; ++i) želanýUhol -= Δu;// Potvrdenie položky (rovnakým spôsobom ako pri klávesnici).if(čísloPoložky() == indexOf) potvrdeniePoložky(); } } }// Animácia kolotoča v časovači.@Overridepublicvoidtik() {doubleΔγ = želanýUhol - roj.uholGama();if(Math.abs(Δγ) >=1.0) { roj.pootoč(0.0,0.0, Δγ /10.0); prekresliRoj =true; infoORoji(); }if(prekresliRoj) { prekresliRoj =false;Svet.vymažGrafiku(); roj.kresli(); }if(Svet.neboloPrekreslené())Svet.prekresli(); }
// Hlavná metóda.publicstaticvoidmain(String[] args) {Svet.použiKonfiguráciu("Kolotoč.cfg");newKolotoč(); } }Balíček SVG ikoniek na prevzatie: kolotoc-ikonky.7z
Výsledok:
Ukážka fungovania kolotoča so zapnutými ladiacimi informáciami a pootočením roviny otáčania.Informačné zdroje, ktoré môžu pomôcť pri riešení matematických problémov súvisiacich s touto kapitolou (triedou):
Poznámka: Zdroje môžu obsahovať chyby (v čase ich citovania ich obsahovali), preto je vhodné informácie z nich konfrontovať s inou (napríklad tlačenou) literatúrou. Autor pri tvorbe tejto triedy použil uvedené zdroje najmä na pripomenutie si informácií o 3D grafike a súvisiacich operáciách s maticami (ktoré naposledy používal asi 12 až 15 rokov pred začatím písania tejto triedy).
- Liekens, Anthony: Computers » Rendering Tutorial. anthony.liekens.net, 2000–2013. Dostupné na: http://anthony.liekens.net/index.php/Computers/RenderingTutorial. Citované: 15. 10. 2017.
- Matrix multiplication – Wikipedia. Dostupné na: https://en.wikipedia.org/wiki/Matrix_multiplication. Citované: 15. 10. 2017.
- Rotation matrix – Wikipedia. Dostupné na: https://en.wikipedia.org/wiki/Rotation_matrix. Citované: 15. 10. 2017.
-
-
Prehľad vnorených tried
Vnorené triedy Modifikátor a typ Trieda a opis classRoj.BodTrieda uchovávajúca údaje o jednom bode roja.classRoj.Smernik Alias pre
Alias pre Smerník.classRoj.SmerníkPomocná trieda na riadené vkladanie bodov do roja.
-
Prehľad atribútov
Atribúty Modifikátor a typ Atribút a opis static intALFAKonštanta slúžiaca na určenie čítania uhla alfa metódouuhol(ktorý)alebo nastavenia uhla alfa metódouuhol(ktorý, hodnota).static intBETAKonštanta slúžiaca na určenie čítania uhla beta metódouuhol(ktorý)alebo nastavenia uhla beta metódouuhol(ktorý, hodnota).Roj.BodbodInštancia aktuálne spracúvaného bodu.static intGAMAKonštanta slúžiaca na určenie čítania uhla gama metódouuhol(ktorý)alebo nastavenia uhla gama metódouuhol(ktorý, hodnota).GRobotkresliToto je kresliaci robot roja.Roj.Smerniksmernik Alias pre smerník.Roj.SmerniksmerníkInštancia smerníka.
-
Prehľad metód
Všetky metódy Statické metódy Inštančné metódy Skutočne definované metódy Modifikátor a typ Metóda a opis Zoznam<Roj.Bod>body()Vráti kópiu aktuálneho zoznamu bodov roja.voidcitajZoSuboru(Súbor súbor, String identifikátor) Alias pre čítajZoSúboru.voidčítajZoSúboru(Súbor súbor, String identifikátor)Prečíta údaje o roji z konfiguračného súboru otvoreného na čítanie.Roj.BoddajBodNa(double súradnicaX, double súradnicaY)Zistí, či sa projekcia niektorého bodu roja nachádza na zadaných súradniciach.Roj.BoddajBodNa(double súradnicaX, double súradnicaY, double polomer)Zistí, či sa projekcia niektorého bodu roja nachádza na zadaných súradniciach.Roj.BoddajBodNa(Poloha objekt)Zistí, či sa projekcia niektorého bodu roja nachádza na súradniciach zadaného objektu.Roj.BoddajBodNa(Poloha objekt, double polomer)Zistí, či sa projekcia niektorého bodu roja nachádza na súradniciach zadaného objektu.Roj.BoddajBodNaMysi() Alias pre dajBodNaMyši.Roj.BoddajBodNaMysi(double polomer) Alias pre dajBodNaMyši.Roj.BoddajBodNaMyši()Zistí, či sa projekcia niektorého bodu roja nachádza na súradniciach myši.Roj.BoddajBodNaMyši(double polomer)Zistí, či sa projekcia niektorého bodu roja nachádza na súradniciach myši.double[]kamera()Vráti aktuálnu polohu kamery vo forme trojprvkového poľa [kx, ky, kz].doublekameraX()Vráti aktuálnu x-ovú súradnicu polohy kamery.voidkameraX(double hodnota)Nastaví novú x-ovú súradnicu polohy kamery.doublekameraY()Vráti aktuálnu y-ovú súradnicu polohy kamery.voidkameraY(double hodnota)Nastaví novú y-ovú súradnicu polohy kamery.doublekameraZ()Vráti aktuálnu z-ovú súradnicu polohy kamery.voidkameraZ(double hodnota)Nastaví novú z-ovú súradnicu polohy kamery.voidkresli()Prekreslí roj s použitím kresliaceho robota roja.doublemierka()Vráti aktuálnu hodnotu mierky roja.voidmierka(double hodnota)Nastaví novú hodnotu mierky roja.voidnastavKameru(double[] bod)Nastaví polohu kamery roja na základe hodnôt zadaného poľa.voidnastavKameru(double nkx, double nky, double nkz)Nastaví novú polohu kamery.voidnastavStredOtacania(double[] bod) Alias pre nastavStredOtáčania.voidnastavStredOtacania(double nxs, double nys, double nzs) Alias pre nastavStredOtáčania.voidnastavStredOtáčania(double[] bod)Nastaví stred otáčania roja na základe hodnôt zadaného poľa.voidnastavStredOtáčania(double nxs, double nys, double nzs)Nastaví nové súradnice stredu otáčania.voidnastavUhly(double[] pole)Nastaví hodnoty uhlov roja na základe hodnôt zadaného poľa.voidnastavUhly(double nα, double nβ, double nγ)static double[]normala(double x1, double y1, double z1, double x2, double y2, double z2, double x3, double y3, double z3) Alias pre normála.static double[]normála(double x1, double y1, double z1, double x2, double y2, double z2, double x3, double y3, double z3)Vypočíta zo zadaných súradníc troch bodov určujúcich plochu v priestore súradnice normálového vektora k tejto ploche a vráti jeho nenormalizované súradnice.static double[]normalizuj(double[] vektor)Normalizuje vektor zadaných súradníc.voidpootoc(double[] pole) Alias pre pootoč.voidpootoc(double Δα, double Δβ, double Δγ) Alias pre pootoč.voidpootoč(double[] pole)Pozmení hodnoty uhlov roja na základe hodnôt zadaného poľa.voidpootoč(double Δα, double Δβ, double Δγ)Zoznam<Roj.Bod>poradieKreslenia()Vráti kópiu aktuálneho zoznamu bodov roja zoradeného podľa poradia kreslenia.voidposunKameru(double[] bod) Alias pre posuňKameru.voidposuňKameru(double[] bod)Posunie polohu kamery roja na základe hodnôt zadaného poľa.voidposunKameru(double Δkx, double Δky, double Δkz) Alias pre posuňKameru.voidposuňKameru(double Δkx, double Δky, double Δkz)Posunie polohu kamery.voidposunStredOtacania(double[] bod) Alias pre posuňStredOtáčania.voidposunStredOtacania(double Δxs, double Δys, double Δzs) Alias pre posuňStredOtáčania.voidposuňStredOtáčania(double[] bod)Posunie stred otáčania roja na základe hodnôt zadaného poľa.voidposuňStredOtáčania(double Δxs, double Δys, double Δzs)Posunie súradnice stredu otáčania.voidprecitajZoSuboru(Súbor súbor, String identifikátor) Alias pre čítajZoSúboru.voidprečítajZoSúboru(Súbor súbor, String identifikátor) Alias pre čítajZoSúboru.voidprepocitaj() Alias pre prepočítaj.voidprepocitat() Alias pre prepočítať.voidprepočítaj()voidprepočítať()Táto metóda vynúti prepočet premietaných súradníc (x3,y3) a veľkostí kreslených objektov (z3) všetkých bodov roja pri najbližšom kreslení alebo pri volaní metódyprepočítaj.Roj.BodpridajBod()Pridá nový bod do roja.voidpridajDoSVG(SVGPodpora svgPodpora)Táto metóda slúži na export grafiky roja do zadanej inštancie SVG podpory.double[]stredOtacania() Alias pre stredOtáčania.doublestredOtacaniaX() Alias pre stredOtáčaniaX.voidstredOtacaniaX(double hodnota) Alias pre stredOtáčaniaX.doublestredOtacaniaY() Alias pre stredOtáčaniaY.voidstredOtacaniaY(double hodnota) Alias pre stredOtáčaniaY.doublestredOtacaniaZ() Alias pre stredOtáčaniaZ.voidstredOtacaniaZ(double hodnota) Alias pre stredOtáčaniaZ.double[]stredOtáčania()Vráti aktuálny stred otáčania vo forme trojprvkového poľa [xs, ys, zs].doublestredOtáčaniaX()Vráti x-ovú súradnicu stredu otáčania.voidstredOtáčaniaX(double hodnota)Nastaví novú hodnotu x-ovej súradnice stredu otáčania.doublestredOtáčaniaY()Vráti y-ovú súradnicu stredu otáčania.voidstredOtáčaniaY(double hodnota)Nastaví novú hodnotu y-ovej súradnice stredu otáčania.doublestredOtáčaniaZ()Vráti z-ovú súradnicu stredu otáčania.voidstredOtáčaniaZ(double hodnota)Nastaví novú hodnotu z-ovej súradnice stredu otáčania.voidtransformovat() Alias pre transformovať.voidtransformovať()Táto metóda vynúti prepočet konečných (globálne transformovaných) súradnícx2,y2,z2všetkých bodov roja pri najbližšom kreslení alebo pri volaní metódytransformuj.voidtransformuj()voidtransformuj(Roj.Bod bod)double[]uhly()Vráti aktuálne hodnoty uhlov alfa (α), beta (β) a gama (γ) roja vo forme trojprvkového poľa [α, β, γ].static double[]uhlyK(double[] vektor)Vráti uhly potrebné na pootočenie jednotkového vektora paralelného s osou z okolo osí x (prvý prvok poľa v návratovej hodnote označovaný v tejto dokomentácii aj ako uhol α) a y (druhý prvok poľa v návratovej hodnote označovaný v tejto dokomentácii aj ako uhol β) tak, aby výsledný vektor smeroval k zadanému polohovému vektoru.static double[]uhlyK(double x, double y, double z)Vráti uhly potrebné na pootočenie jednotkového vektora paralelného s osou z okolo osí x (prvý prvok poľa v návratovej hodnote označovaný v tejto dokomentácii aj ako uhol α) a y (druhý prvok poľa v návratovej hodnote označovaný v tejto dokomentácii aj ako uhol β) tak, aby výsledný vektor smeroval k zadanému polohovému vektoru.doubleuhol(int ktorý)voiduhol(int ktorý, double hodnota)Nastaví jeden alebo viacero uhlov na stanovenú hodnotu.doubleuholAlfa()Vráti aktuálnu hodnotu uhla alfa (vnútorne značenéhoα).voiduholAlfa(double hodnota)Nastaví novú hodnotu uhlu alfa (vnútorne značenéhoα).doubleuholBeta()Vráti aktuálnu hodnotu uhla beta (vnútorne značenéhoβ).voiduholBeta(double hodnota)Nastaví novú hodnotu uhlu beta (vnútorne značenéhoβ).doubleuholGama()Vráti aktuálnu hodnotu uhla gama (vnútorne značenéhoγ).voiduholGama(double hodnota)Nastaví novú hodnotu uhlu gama (vnútorne značenéhoγ).voidulozDoSuboru(Súbor súbor, String identifikátor) Alias pre uložDoSúboru.voiduložDoSúboru(Súbor súbor, String identifikátor)Zapíše údaje o roji do konfiguračného súboru otvoreného na zápis.voidvymaz() Alias pre vymaž.voidvymazBod(Roj.Bod bod) Alias pre vymažBod.voidvymaž()Odstráni všetky body z roja.voidvymažBod(Roj.Bod bod)Odstráni bod z roja.voidzmenMierku(double Δmierka) Alias pre zmeňMierku.voidzmeňMierku(double Δmierka)Upraví hodnotu mierky roja.
-
-
-
Podrobnosti atribútov
-
smerník
public final Roj.Smernik smerník
Inštancia smerníka. Podrobnosti v dokumentácii triedy
Smerník.
-
smernik
public final Roj.Smernik smernik
Alias pre smerník.
-
ALFA
public static final int ALFA
Konštanta slúžiaca na určenie čítania uhla alfa metódou
uhol(ktorý)alebo nastavenia uhla alfa metódouuhol(ktorý, hodnota).- Pozri tiež:
- Hodnoty konštánt
-
BETA
public static final int BETA
Konštanta slúžiaca na určenie čítania uhla beta metódou
uhol(ktorý)alebo nastavenia uhla beta metódouuhol(ktorý, hodnota).- Pozri tiež:
- Hodnoty konštánt
-
GAMA
public static final int GAMA
Konštanta slúžiaca na určenie čítania uhla gama metódou
uhol(ktorý)alebo nastavenia uhla gama metódouuhol(ktorý, hodnota).- Pozri tiež:
- Hodnoty konštánt
-
kresli
public GRobot kresli
Toto je kresliaci robot roja. Ak nie je nastavený, tak roj nemôže byť kreslený a pri individuálnom pokuse o nakreslenie bodu roja nastane chyba. Tvar tohto robota určuje predvolený tvar objektov na polohách bodov roja. Vlastnosti pera ovplyvňujú kreslenie spojov medzi bodmi roja – hrúbka určuje predvolenú hrúbku a poloha (poloha v zmysle stavu zdvihnutia/ploženia pera) to, či budú všetky spoje paušálne nakreslené alebo nie.
-
bod
public Roj.Bod bod
Inštancia aktuálne spracúvaného bodu. Počas kreslenia spojníc a objektov alebo počas exportu do SVG formátu je do tohto atribútu ukladaná inštancia aktuálne spracúvaného bodu.
-
-
Podrobnosti konštruktorov
-
Roj
public Roj(GRobot kreslič)
Konštruktor roja. Prijíma inštanciu grafického robota, ktorý bude kresličom roja. Bez kresliča roj nemôže byť nakreslený.
- Parametre:
kreslič– kreslič roja
-
-
Podrobnosti metód
-
pridajBod
public Roj.Bod pridajBod()
Pridá nový bod do roja. Bod bude mať hodnoty všetkých atribútov nastavené na predvolené. Návratová hodnota tejto metódy je inštancia nového bodu, ktorá môže byť použitá na nastavenie všetkých vlastností bodu.
-
vymažBod
public void vymažBod(Roj.Bod bod)
Odstráni bod z roja.
- Parametre:
bod– inštancia bodu, ktorý má byť z roja odstránený
-
vymaž
public void vymaž()
Odstráni všetky body z roja.
-
vymaz
public void vymaz()
Alias pre vymaž.
-
body
public Zoznam<Roj.Bod> body()
Vráti kópiu aktuálneho zoznamu bodov roja. Zoznam je určený (predovšetkým) na prechádzanie a úpravu vlastností jednotlivých bodov. Vymazaním bodu z tohto zoznamu sa bod z roja nevymaže. Na vymazanie bodu slúži metóda roja
vymažBod.
-
poradieKreslenia
public Zoznam<Roj.Bod> poradieKreslenia()
Vráti kópiu aktuálneho zoznamu bodov roja zoradeného podľa poradia kreslenia. Zoznam je určený (predovšetkým) na prechádzanie v súvislosti s prekresľovaním objektov. (Napríklad vymazaním bodu z tohto zoznamu sa bod nevymaže. Na vymazanie bodu z roja slúži metóda
vymažBod.)
-
uhly
public double[] uhly()
Vráti aktuálne hodnoty uhlov alfa (α), beta (β) a gama (γ) roja vo forme trojprvkového poľa [α, β, γ].
Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Návratová hodnota:
- aktuálne hodnoty uhlov roja v trojprvkovom poli
- Pozri tiež:
nastavUhly(double[])
-
uholAlfa
public double uholAlfa()
Vráti aktuálnu hodnotu uhla alfa (vnútorne značeného
α). Tento uhol je spätý s rotáciou okolo osi x, pričom sa do úvahy berie aj aktuálny stred otáčania. Rotácia zmenou uhlov alfa (α), beta (β) a gama (γ) je v podstate rotáciou kamery roja.Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Návratová hodnota:
- aktuálna hodnota uhla alfa
- Pozri tiež:
uholBeta(),uholGama(),uholAlfa(double),uholBeta(double),uholGama(double),uhol(int),uhol(int, double),nastavUhly(double, double, double),pootoč(double, double, double)
-
uholBeta
public double uholBeta()
Vráti aktuálnu hodnotu uhla beta (vnútorne značeného
β). Tento uhol je spätý s rotáciou okolo osi y, pričom sa do úvahy berie aj aktuálny stred otáčania. Rotácia zmenou uhlov alfa (α), beta (β) a gama (γ) je v podstate rotáciou kamery roja.Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Návratová hodnota:
- aktuálna hodnota uhla beta
- Pozri tiež:
uholAlfa(),uholGama(),uholAlfa(double),uholBeta(double),uholGama(double),uhol(int),uhol(int, double),nastavUhly(double, double, double),pootoč(double, double, double)
-
uholGama
public double uholGama()
Vráti aktuálnu hodnotu uhla gama (vnútorne značeného
γ). Tento uhol je spätý s rotáciou okolo osi z, pričom sa do úvahy berie aj aktuálny stred otáčania. Rotácia zmenou uhlov alfa (α), beta (β) a gama (γ) je v podstate rotáciou kamery roja.Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Návratová hodnota:
- aktuálna hodnota uhla gama
- Pozri tiež:
uholAlfa(),uholBeta(),uholAlfa(double),uholBeta(double),uholGama(double),uhol(int),uhol(int, double),nastavUhly(double, double, double),pootoč(double, double, double)
-
uholAlfa
public void uholAlfa(double hodnota)
Nastaví novú hodnotu uhlu alfa (vnútorne značeného
α). Pozri aj opis metódyuholAlfa().Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
hodnota– nová hodnota uhla alfa- Pozri tiež:
uholAlfa(),uholBeta(),uholGama(),uholBeta(double),uholGama(double),uhol(int),uhol(int, double),nastavUhly(double, double, double),pootoč(double, double, double)
-
uholBeta
public void uholBeta(double hodnota)
Nastaví novú hodnotu uhlu beta (vnútorne značeného
β). Pozri aj opis metódyuholBeta().Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
hodnota– nová hodnota uhla beta- Pozri tiež:
uholAlfa(),uholBeta(),uholGama(),uholAlfa(double),uholGama(double),uhol(int),uhol(int, double),nastavUhly(double, double, double),pootoč(double, double, double)
-
uholGama
public void uholGama(double hodnota)
Nastaví novú hodnotu uhlu gama (vnútorne značeného
γ). Pozri aj opis metódyuholGama().Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
hodnota– nová hodnota uhla gama- Pozri tiež:
uholAlfa(),uholBeta(),uholGama(),uholAlfa(double),uholBeta(double),uhol(int),uhol(int, double),nastavUhly(double, double, double),pootoč(double, double, double)
-
uhol
public double uhol(int ktorý)
Vráti hodnotu zadaného uhla, pričom ak zadaná konštanta obsahuje kombináciu príznakov viacerých uhlov, tak prioritne vracia uhol
ALFA, potomBETAa nakoniecGAMA.Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
ktorý– konštanta určujúca, ktorý uhol má byť vrátený (ALFA,BETA,GAMA)- Návratová hodnota:
- hodnota uhla určeného parametrom
ktorý - Pozri tiež:
uholAlfa(),uholBeta(),uholGama(),uholAlfa(double),uholBeta(double),uholGama(double),uhol(int, double),nastavUhly(double, double, double),pootoč(double, double, double)
-
uhol
public void uhol(int ktorý, double hodnota)Nastaví jeden alebo viacero uhlov na stanovenú hodnotu.
Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
ktorý– konštanta určujúca, ktorý uhol alebo uhly majú byť nastavené; parameter môže byť kombináciou konštántALFA,BETAaGAMA)hodnota– nová hodnota uhla alebo uhlov určených parametromktorý- Pozri tiež:
uholAlfa(),uholBeta(),uholGama(),uholAlfa(double),uholBeta(double),uholGama(double),uhol(int),nastavUhly(double, double, double),pootoč(double, double, double)
-
nastavUhly
public void nastavUhly(double nα, double nβ, double nγ)Nastaví hodnoty všetkých troch uhlov alfa, beta a gama. (Pozri aj stred otáčania.)
Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
nα– nová hodnota uhla alfanβ– nová hodnota uhla betanγ– nová hodnota uhla gama- Pozri tiež:
uholAlfa(),uholBeta(),uholGama(),uholAlfa(double),uholBeta(double),uholGama(double),uhol(int),uhol(int, double),pootoč(double, double, double)
-
nastavUhly
public void nastavUhly(double[] pole)
Nastaví hodnoty uhlov roja na základe hodnôt zadaného poľa. Metóda má zjednodušiť nastavenie orientácie roja (napríklad v súvislosti zo zálohou a obnovou stavu roja; pozri aj
uhly). Ak je zadané pole aspoň šesťprvkové, tak metóda pracuje s druhou trojicou prvkov poľa. Ak je pole aspoň trojprvkové, tak metóda berie do úvahy jeho prvé tri prvky. (Ak má pole menší počet prvkov, tak metóda nevykoná nič.)Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
pole– pole na základe ktorého budú nastavené uhly roja- Pozri tiež:
uhly(),nastavUhly(double, double, double)
-
pootoč
public void pootoč(double Δα, double Δβ, double Δγ)Pozmení hodnoty všetkých troch uhlov alfa, beta a gama.
Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
Δα– miera zmeny hodnoty uhla alfaΔβ– miera zmeny hodnoty uhla betaΔγ– miera zmeny hodnoty uhla gama- Pozri tiež:
uholAlfa(),uholBeta(),uholGama(),uholAlfa(double),uholBeta(double),uholGama(double),uhol(int),uhol(int, double),nastavUhly(double, double, double)
-
pootoc
public void pootoc(double Δα, double Δβ, double Δγ) Alias pre pootoč.
-
pootoč
public void pootoč(double[] pole)
Pozmení hodnoty uhlov roja na základe hodnôt zadaného poľa. Metóda má zjednodušiť zmenu orientácie roja. Ak je zadané pole aspoň šesťprvkové, tak metóda pracuje s druhou trojicou prvkov poľa. Ak je pole aspoň trojprvkové, tak metóda berie do úvahy jeho prvé tri prvky. (Ak má pole menší počet prvkov, tak metóda nevykoná nič.)
Poznámka: Transformácia pootočenia je zložená z troch samostatných transformácií rotácie okolo jednotlivých osí súradnicovej sústavy. Skladanie transformácií nie je komutatívne, takže výsledok rotácie nie je intuitívny a môže sa líšiť od (intuitívne) predpokladaného stavu.
- Parametre:
pole– pole na základe ktorého budú pozmenené uhly roja- Pozri tiež:
nastavUhly(double[]),pootoč(double, double, double)
-
pootoc
public void pootoc(double[] pole)
Alias pre pootoč.
-
stredOtáčania
public double[] stredOtáčania()
Vráti aktuálny stred otáčania vo forme trojprvkového poľa [xs, ys, zs].
- Návratová hodnota:
- aktuálny stred otáčania
- Pozri tiež:
nastavStredOtáčania(double[])
-
stredOtacania
public double[] stredOtacania()
Alias pre stredOtáčania.
-
stredOtáčaniaX
public double stredOtáčaniaX()
Vráti x-ovú súradnicu stredu otáčania.
- Návratová hodnota:
- aktuálna hodnota x-ovej súradnice stredu otáčania
- Pozri tiež:
stredOtáčaniaY(),stredOtáčaniaZ(),stredOtáčaniaX(double),stredOtáčaniaY(double),stredOtáčaniaZ(double),nastavStredOtáčania(double, double, double),posuňStredOtáčania(double, double, double)
-
stredOtacaniaX
public double stredOtacaniaX()
Alias pre stredOtáčaniaX.
-
stredOtáčaniaY
public double stredOtáčaniaY()
Vráti y-ovú súradnicu stredu otáčania.
- Návratová hodnota:
- aktuálna hodnota y-ovej súradnice stredu otáčania
- Pozri tiež:
stredOtáčaniaX(),stredOtáčaniaZ(),stredOtáčaniaX(double),stredOtáčaniaY(double),stredOtáčaniaZ(double),nastavStredOtáčania(double, double, double),posuňStredOtáčania(double, double, double)
-
stredOtacaniaY
public double stredOtacaniaY()
Alias pre stredOtáčaniaY.
-
stredOtáčaniaZ
public double stredOtáčaniaZ()
Vráti z-ovú súradnicu stredu otáčania.
- Návratová hodnota:
- aktuálna hodnota z-ovej súradnice stredu otáčania
- Pozri tiež:
stredOtáčaniaX(),stredOtáčaniaY(),stredOtáčaniaX(double),stredOtáčaniaY(double),stredOtáčaniaZ(double),nastavStredOtáčania(double, double, double),posuňStredOtáčania(double, double, double)
-
stredOtacaniaZ
public double stredOtacaniaZ()
Alias pre stredOtáčaniaZ.
-
stredOtáčaniaX
public void stredOtáčaniaX(double hodnota)
Nastaví novú hodnotu x-ovej súradnice stredu otáčania.
- Parametre:
hodnota– nová hodnota x-ovej súradnice stredu otáčania- Pozri tiež:
stredOtáčaniaX(),stredOtáčaniaY(),stredOtáčaniaZ(),stredOtáčaniaY(double),stredOtáčaniaZ(double),nastavStredOtáčania(double, double, double),posuňStredOtáčania(double, double, double)
-
stredOtacaniaX
public void stredOtacaniaX(double hodnota)
Alias pre stredOtáčaniaX.
-
stredOtáčaniaY
public void stredOtáčaniaY(double hodnota)
Nastaví novú hodnotu y-ovej súradnice stredu otáčania.
- Parametre:
hodnota– nová hodnota y-ovej súradnice stredu otáčania- Pozri tiež:
stredOtáčaniaX(),stredOtáčaniaY(),stredOtáčaniaZ(),stredOtáčaniaX(double),stredOtáčaniaZ(double),nastavStredOtáčania(double, double, double),posuňStredOtáčania(double, double, double)
-
stredOtacaniaY
public void stredOtacaniaY(double hodnota)
Alias pre stredOtáčaniaY.
-
stredOtáčaniaZ
public void stredOtáčaniaZ(double hodnota)
Nastaví novú hodnotu z-ovej súradnice stredu otáčania.
- Parametre:
hodnota– nová hodnota z-ovej súradnice stredu otáčania- Pozri tiež:
stredOtáčaniaX(),stredOtáčaniaY(),stredOtáčaniaZ(),stredOtáčaniaX(double),stredOtáčaniaY(double),nastavStredOtáčania(double, double, double),posuňStredOtáčania(double, double, double)
-
stredOtacaniaZ
public void stredOtacaniaZ(double hodnota)
Alias pre stredOtáčaniaZ.
-
nastavStredOtáčania
public void nastavStredOtáčania(double nxs, double nys, double nzs)- Parametre:
nxs– nová hodnota x-ovej súradnice stredu otáčanianys– nová hodnota y-ovej súradnice stredu otáčanianzs– nová hodnota z-ovej súradnice stredu otáčania- Pozri tiež:
stredOtáčaniaX(),stredOtáčaniaY(),stredOtáčaniaZ(),stredOtáčaniaX(double),stredOtáčaniaY(double),stredOtáčaniaZ(double),posuňStredOtáčania(double, double, double)
-
nastavStredOtacania
public void nastavStredOtacania(double nxs, double nys, double nzs) Alias pre nastavStredOtáčania.
-
nastavStredOtáčania
public void nastavStredOtáčania(double[] bod)
Nastaví stred otáčania roja na základe hodnôt zadaného poľa. Metóda má zjednodušiť nastavenie polohy stredu otáčania roja berúc do úvahy spôsob práce smerníka. Ak je zadané pole aspoň trojprvkové, tak metóda berie do úvahy prvé tri jeho prvky. (Ak má pole menší počet prvkov, tak metóda nevykoná nič.)
- Parametre:
bod– súradnice bodu určujúce novú polohu stredu otáčania roja- Pozri tiež:
stredOtáčania(),nastavStredOtáčania(double, double, double)
-
nastavStredOtacania
public void nastavStredOtacania(double[] bod)
Alias pre nastavStredOtáčania.
-
posuňStredOtáčania
public void posuňStredOtáčania(double Δxs, double Δys, double Δzs)Posunie súradnice stredu otáčania. (Pozri aj uhly alfa, beta a gama.)
- Parametre:
Δxs– miera zmeny x-ovej súradnice stredu otáčaniaΔys– miera zmeny y-ovej súradnice stredu otáčaniaΔzs– miera zmeny z-ovej súradnice stredu otáčania- Pozri tiež:
stredOtáčaniaX(),stredOtáčaniaY(),stredOtáčaniaZ(),stredOtáčaniaX(double),stredOtáčaniaY(double),stredOtáčaniaZ(double),nastavStredOtáčania(double, double, double)
-
posunStredOtacania
public void posunStredOtacania(double Δxs, double Δys, double Δzs) Alias pre posuňStredOtáčania.
-
posuňStredOtáčania
public void posuňStredOtáčania(double[] bod)
Posunie stred otáčania roja na základe hodnôt zadaného poľa. Metóda má zjednodušiť zmenu polohy stredu otáčania roja berúc do úvahy spôsob práce smerníka. Ak je zadané pole aspoň trojprvkové, tak metóda berie do úvahy prvé tri jeho prvky. (Ak má pole menší počet prvkov, tak metóda nevykoná nič.)
- Parametre:
bod– trojica polohových súradníc, o ktoré bude posunutá poloha stredu otáčania roja- Pozri tiež:
nastavStredOtáčania(double[]),posuňStredOtáčania(double, double, double)
-
posunStredOtacania
public void posunStredOtacania(double[] bod)
Alias pre posuňStredOtáčania.
-
kamera
public double[] kamera()
Vráti aktuálnu polohu kamery vo forme trojprvkového poľa [kx, ky, kz].
- Návratová hodnota:
- aktuálna poloha kamery
- Pozri tiež:
nastavKameru(double[])
-
kameraX
public double kameraX()
Vráti aktuálnu x-ovú súradnicu polohy kamery.
- Návratová hodnota:
- aktuálna hodnota x-ovej súradnice polohy kamery
- Pozri tiež:
kameraY(),kameraZ(),kameraX(double),kameraY(double),kameraZ(double),nastavKameru(double, double, double),posuňKameru(double, double, double)
-
kameraY
public double kameraY()
Vráti aktuálnu y-ovú súradnicu polohy kamery.
- Návratová hodnota:
- aktuálna hodnota y-ovej súradnice polohy kamery
- Pozri tiež:
kameraX(),kameraZ(),kameraX(double),kameraY(double),kameraZ(double),nastavKameru(double, double, double),posuňKameru(double, double, double)
-
kameraZ
public double kameraZ()
Vráti aktuálnu z-ovú súradnicu polohy kamery.
- Návratová hodnota:
- aktuálna hodnota z-ovej súradnice polohy kamery
- Pozri tiež:
kameraX(),kameraY(),kameraX(double),kameraY(double),kameraZ(double),nastavKameru(double, double, double),posuňKameru(double, double, double)
-
kameraX
public void kameraX(double hodnota)
Nastaví novú x-ovú súradnicu polohy kamery.
- Parametre:
hodnota– nová hodnota x-ovej súradnice polohy kamery- Pozri tiež:
kameraX(),kameraY(),kameraZ(),kameraY(double),kameraZ(double),nastavKameru(double, double, double),posuňKameru(double, double, double)
-
kameraY
public void kameraY(double hodnota)
Nastaví novú y-ovú súradnicu polohy kamery.
- Parametre:
hodnota– nová hodnota y-ovej súradnice polohy kamery- Pozri tiež:
kameraX(),kameraY(),kameraZ(),kameraX(double),kameraZ(double),nastavKameru(double, double, double),posuňKameru(double, double, double)
-
kameraZ
public void kameraZ(double hodnota)
Nastaví novú z-ovú súradnicu polohy kamery.
- Parametre:
hodnota– nová hodnota z-ovej súradnice polohy kamery- Pozri tiež:
kameraX(),kameraY(),kameraZ(),kameraX(double),kameraY(double),kameraZ(double),nastavKameru(double, double, double),posuňKameru(double, double, double)
-
nastavKameru
public void nastavKameru(double nkx, double nky, double nkz)Nastaví novú polohu kamery.
- Parametre:
nkx– nová hodnota x-ovej súradnice polohy kamerynky– nová hodnota y-ovej súradnice polohy kamerynkz– nová hodnota z-ovej súradnice polohy kamery- Pozri tiež:
kameraX(),kameraY(),kameraZ(),kameraX(double),kameraY(double),kameraZ(double),posuňKameru(double, double, double)
-
nastavKameru
public void nastavKameru(double[] bod)
Nastaví polohu kamery roja na základe hodnôt zadaného poľa. Metóda má zjednodušiť nastavenie polohy kamery roja berúc do úvahy spôsob práce smerníka. Ak je zadané pole aspoň trojprvkové, tak metóda berie do úvahy prvé tri jeho prvky. (Ak má pole menší počet prvkov, tak metóda nevykoná nič.)
- Parametre:
bod– súradnice bodu, na ktoré bude nastavená poloha kamery- Pozri tiež:
kamera(),nastavKameru(double, double, double)
-
posuňKameru
public void posuňKameru(double Δkx, double Δky, double Δkz)Posunie polohu kamery.
- Parametre:
Δkx– miera zmeny hodnoty x-ovej súradnice polohy kameryΔky– miera zmeny hodnoty y-ovej súradnice polohy kameryΔkz– miera zmeny hodnoty z-ovej súradnice polohy kamery- Pozri tiež:
kameraX(),kameraY(),kameraZ(),kameraX(double),kameraY(double),kameraZ(double),nastavKameru(double, double, double)
-
posunKameru
public void posunKameru(double Δkx, double Δky, double Δkz) Alias pre posuňKameru.
-
posuňKameru
public void posuňKameru(double[] bod)
Posunie polohu kamery roja na základe hodnôt zadaného poľa. Metóda má zjednodušiť zmenu polohy kamery roja berúc do úvahy spôsob práce smerníka. Ak je zadané pole aspoň trojprvkové, metóda berie do úvahy prvé tri jeho prvky. (Ak má pole menší počet prvkov, tak metóda nevykoná nič.)
- Parametre:
bod– súradnice bodu, o ktoré bude posunutá poloha kamery- Pozri tiež:
nastavKameru(double[]),posuňKameru(double, double, double)
-
posunKameru
public void posunKameru(double[] bod)
Alias pre posuňKameru.
-
mierka
public double mierka()
Vráti aktuálnu hodnotu mierky roja. Mierka vo veľkej miere ovplyvňuje zobrazenie roja. Ak je nesprávne nastavená, výsledok je skreslený. Dá sa prirovnať k ohniskovej vzdialenosti objektívu.
- Návratová hodnota:
- aktuálna hodnota mierky zobrazenia roja
- Pozri tiež:
mierka(double),zmeňMierku(double)
-
mierka
public void mierka(double hodnota)
Nastaví novú hodnotu mierky roja. Pozri aj opis metódy
mierka().- Parametre:
hodnota– nová hodnota mierky zobrazenia roja- Pozri tiež:
mierka(),zmeňMierku(double)
-
zmeňMierku
public void zmeňMierku(double Δmierka)
Upraví hodnotu mierky roja. Pozri aj opis metódy
mierka().- Parametre:
Δmierka– miera zmeny hodnoty mierky zobrazenia roja- Pozri tiež:
mierka(),mierka(double)
-
zmenMierku
public void zmenMierku(double Δmierka)
Alias pre zmeňMierku.
-
transformovať
public void transformovať()
Táto metóda vynúti prepočet konečných (globálne transformovaných) súradníc
x2,y2,z2všetkých bodov roja pri najbližšom kreslení alebo pri volaní metódytransformuj. Volanie tejto metódy zároveň nastaví príznak prepočítania atribútov použitých pri kreslení (premietaní) bodov roja. (Pozri metódu:prepočítať.)- Pozri tiež:
prepočítať(),transformuj()
-
transformovat
public void transformovat()
Alias pre transformovať.
-
transformuj
public void transformuj()
Táto metóda prepočíta hodnoty konečných (globálne transformovaných) súradníc
x2,y2,z2všetkých bodov roja. Metóda používa vnútorný príznak na overenie toho, či je prepočítanie potrebné. Ak chcete prepočítanie vynútiť, musíte pred volaním tejto metódy zavolať metódutransformovať.- Pozri tiež:
transformovať(),prepočítaj(),transformuj(Roj.Bod)
-
transformuj
public void transformuj(Roj.Bod bod)
Toto je metóda, ktorá prepočíta hodnoty konečných (globálne transformovaných) súradníc
x2,y2,z2zadaného bodu roja.- Parametre:
bod– inštancia bodu roja, ktorého atribúty majú byť prepočítané- Pozri tiež:
transformuj()
-
prepočítať
public void prepočítať()
Táto metóda vynúti prepočet premietaných súradníc (
x3,y3) a veľkostí kreslených objektov (z3) všetkých bodov roja pri najbližšom kreslení alebo pri volaní metódyprepočítaj.- Pozri tiež:
transformovať(),prepočítaj()
-
prepocitat
public void prepocitat()
Alias pre prepočítať.
-
prepočítaj
public void prepočítaj()
Táto metóda prepočíta pre všetky body roja atribúty cieľovej (premietanej) polohy na plátne a veľkosti objektu kresleného na polohe bodu – hodnoty atribútov
x3,y3az3. Metóda používa vnútorný príznak na overenie toho, či je prepočítanie potrebné. Ak chcete prepočítanie vynútiť, musíte pred volaním tejto metódy zavolať metóduprepočítať.- Pozri tiež:
prepočítať(),transformuj()
-
prepocitaj
public void prepocitaj()
Alias pre prepočítaj.
-
kresli
public void kresli()
Prekreslí roj s použitím kresliaceho robota roja.
Poznámka: Pred kreslením roja sú zálohované iba dve vlastnosti: farba a hrúbka čiary robota. Ich hodnoty sú obnovené až po nakreslení všetkých prvkov roja, čiže ak zákaznícke kreslenie objektu (telesa) v niektorom z bodov roja tieto vlastnosti zmenilo (a neobnovilo), tak sa zmeny prenesú do kreslenia ďalších prvkov roja…
Poznámka: Počas kreslenia je aktualizovaná inštancia roja
bod, ktorá sa dá využiť pri zákaznícky definovanom kreslení bodov roja (pozrikreslenie).
-
pridajDoSVG
public void pridajDoSVG(SVGPodpora svgPodpora)
Táto metóda slúži na export grafiky roja do zadanej inštancie SVG podpory. Táto metóda automaticky spúšťa metódy
spojDoSVGatelesoDoSVGpre jednotlivé body roja.Poznámka: Počas exportu je aktualizovaná inštancia roja
bod, ktorá sa dá využiť pri zákaznícky definovanom exporte bodov roja (pozrisvgKreslenie).- Parametre:
svgPodpora– inštancia SVG podpory, do ktorej budú exportované tvary Javy reprezentujúce všetky viditeľné spoje medzi bodmi roja a telesá umiestnené v bodoch roja- Pozri tiež:
Roj.Bod.spojDoSVG(SVGPodpora),Roj.Bod.telesoDoSVG(SVGPodpora)
-
normála
public static double[] normála(double x1, double y1, double z1, double x2, double y2, double z2, double x3, double y3, double z3)Vypočíta zo zadaných súradníc troch bodov určujúcich plochu v priestore súradnice normálového vektora k tejto ploche a vráti jeho nenormalizované súradnice.
Inak povedané, metóda vypočíta súradnice smerového vektora kolmice k ploche, tento vektor však neprepočíta na jednotkový, ale ho vráti v (kvázi) „surovom“ stave. (Na väčšinu účelov by mal postačovať aj nenormalizovaný vektor. V prípade potreby použite metódu
normalizuj.)- Parametre:
x1– x-ová súradnica prvého boduy1– y-ová súradnica prvého boduz1– z-ová súradnica prvého bodux2– x-ová súradnica druhého boduy2– y-ová súradnica druhého boduz2– z-ová súradnica druhého bodux3– x-ová súradnica tretieho boduy3– y-ová súradnica tretieho boduz3– z-ová súradnica tretieho bodu- Návratová hodnota:
- trojprvkové pole so súradnicami normálového vektora plochy (určenej tromi bodmi v parametroch)
-
normala
public static double[] normala(double x1, double y1, double z1, double x2, double y2, double z2, double x3, double y3, double z3) Alias pre normála.
-
normalizuj
public static double[] normalizuj(double[] vektor)
Normalizuje vektor zadaných súradníc. Táto metóda pracuje s ľubovoľne veľkým vektorom a normalizuje všetky súradnice podľa dĺžky vektora. To znamená, že ak má vektor šesť súradníc (pozri
smerník.dajStav()), tak metóda vzájomne normalizuje všetkých šesť súradníc dohromady (akoby išlo napríklad o šesťrozmerný bod)! Návratovou hodnotou je rovnaké pole, ktoré bolo zadané vo vstupnom parametrivektor, len s prepočítanými súradnicami. (To znamená, že všetky zmeny sa rovnako prejavia aj vo vstupnom poli – ide o rovnakú inštanciu poľa.)- Parametre:
vektor– vektor súradníc určených na normalizáciu- Návratová hodnota:
- vektor s normalizovanými súradnicami
-
uhlyK
public static double[] uhlyK(double x, double y, double z)Vráti uhly potrebné na pootočenie jednotkového vektora paralelného s osou z okolo osí x (prvý prvok poľa v návratovej hodnote označovaný v tejto dokomentácii aj ako uhol α) a y (druhý prvok poľa v návratovej hodnote označovaný v tejto dokomentácii aj ako uhol β) tak, aby výsledný vektor smeroval k zadanému polohovému vektoru.
- Parametre:
x– x-ová súradnica polohového vektoray– y-ová súradnica polohového vektoraz– z-ová súradnica polohového vektora- Návratová hodnota:
- dvojprvkové pole s požadovanými uhlami
-
uhlyK
public static double[] uhlyK(double[] vektor)
Vráti uhly potrebné na pootočenie jednotkového vektora paralelného s osou z okolo osí x (prvý prvok poľa v návratovej hodnote označovaný v tejto dokomentácii aj ako uhol α) a y (druhý prvok poľa v návratovej hodnote označovaný v tejto dokomentácii aj ako uhol β) tak, aby výsledný vektor smeroval k zadanému polohovému vektoru. Ak zadaný vektor neobsahuje aspoň tri prvky, tak metóda vráti hodnotu
null.- Parametre:
vektor– polohový vektor súradníc- Návratová hodnota:
- dvojprvkové pole s požadovanými uhlami alebo
null
-
dajBodNa
public Roj.Bod dajBodNa(double súradnicaX, double súradnicaY, double polomer)
Zistí, či sa projekcia niektorého bodu roja nachádza na zadaných súradniciach. Metóda využíva metódu bodu roja:
bodV. Bod, ktorý vyhovie podmienke je vrátený. Ak nie je nájdený žiadny bod, tak metóda vráti hodnotunull.- Parametre:
súradnicaX– x-ová súradnica bodusúradnicaY– y-ová súradnica bodupolomer– polomer vyšetrovaného kruhu (pozribodV)- Návratová hodnota:
- nájdený bod alebo
null
-
dajBodNa
public Roj.Bod dajBodNa(Poloha objekt, double polomer)
Zistí, či sa projekcia niektorého bodu roja nachádza na súradniciach zadaného objektu. Metóda využíva metódu bodu roja:
bodV. Bod, ktorý vyhovie podmienke je vrátený. Ak nie je nájdený žiadny bod, tak metóda vráti hodnotunull.- Parametre:
objekt– objekt, ktorého poloha je použitá na overenie bodovpolomer– polomer vyšetrovaného kruhu (pozribodV)- Návratová hodnota:
- nájdený bod alebo
null
-
dajBodNa
public Roj.Bod dajBodNa(double súradnicaX, double súradnicaY)
Zistí, či sa projekcia niektorého bodu roja nachádza na zadaných súradniciach. Metóda využíva metódu bodu roja:
bodV. Bod, ktorý vyhovie podmienke je vrátený. Ak nie je nájdený žiadny bod, tak metóda vráti hodnotunull.- Parametre:
súradnicaX– x-ová súradnica bodusúradnicaY– y-ová súradnica bodu- Návratová hodnota:
- nájdený bod alebo
null
-
dajBodNa
public Roj.Bod dajBodNa(Poloha objekt)
Zistí, či sa projekcia niektorého bodu roja nachádza na súradniciach zadaného objektu. Metóda využíva metódu bodu roja:
bodV. Bod, ktorý vyhovie podmienke je vrátený. Ak nie je nájdený žiadny bod, tak metóda vráti hodnotunull.- Parametre:
objekt– objekt, ktorého poloha je použitá na overenie bodov- Návratová hodnota:
- nájdený bod alebo
null
-
dajBodNaMyši
public Roj.Bod dajBodNaMyši(double polomer)
Zistí, či sa projekcia niektorého bodu roja nachádza na súradniciach myši. Metóda využíva metódu bodu roja:
myšV. Bod, ktorý vyhovie podmienke je vrátený. Ak nie je nájdený žiadny bod, tak metóda vráti hodnotunull.- Parametre:
polomer– polomer vyšetrovaného kruhu (pozrimyšV)- Návratová hodnota:
- nájdený bod alebo
null
-
dajBodNaMysi
public Roj.Bod dajBodNaMysi(double polomer)
Alias pre dajBodNaMyši.
-
dajBodNaMyši
public Roj.Bod dajBodNaMyši()
Zistí, či sa projekcia niektorého bodu roja nachádza na súradniciach myši. Metóda využíva metódu bodu roja:
myšV. Bod, ktorý vyhovie podmienke je vrátený. Ak nie je nájdený žiadny bod, tak metóda vráti hodnotunull.- Návratová hodnota:
- nájdený bod alebo
null
-
dajBodNaMysi
public Roj.Bod dajBodNaMysi()
Alias pre dajBodNaMyši.
-
čítajZoSúboru
public void čítajZoSúboru(Súbor súbor, String identifikátor) throws IOException
Prečíta údaje o roji z konfiguračného súboru otvoreného na čítanie. Metóda prijíma identifikátor menného priestoru. Identifikátor smie mať hodnotu
null. V takom prípade sú údaje čítané z aktuálneho menného priestoru zadaného konfiguračného súboru.- Parametre:
súbor– inštancia triedySúborotvorená na čítanieidentifikátor– vnorený menný priestor, z ktorého budú prevzaté údaje o roji- Výnimky:
IOException– ak vznikla chyba vo vstupno-výstupnej operácii
-
citajZoSuboru
public void citajZoSuboru(Súbor súbor, String identifikátor) throws IOException
Alias pre čítajZoSúboru.- Výnimky:
IOException
-
prečítajZoSúboru
public void prečítajZoSúboru(Súbor súbor, String identifikátor) throws IOException
Alias pre čítajZoSúboru.- Výnimky:
IOException
-
precitajZoSuboru
public void precitajZoSuboru(Súbor súbor, String identifikátor) throws IOException
Alias pre čítajZoSúboru.- Výnimky:
IOException
-
uložDoSúboru
public void uložDoSúboru(Súbor súbor, String identifikátor) throws IOException
Zapíše údaje o roji do konfiguračného súboru otvoreného na zápis. Metóda prijíma identifikátor menného priestoru. Identifikátor smie mať hodnotu
null. V takom prípade sú údaje ukladané do aktuálneho menného priestoru zadaného konfiguračného súboru.- Parametre:
súbor– inštancia triedySúborotvorená na zápisidentifikátor– vnorený menný priestor, do ktorého budú vložené údaje o roji- Výnimky:
IOException– ak vznikla chyba vo vstupno-výstupnej operácii
-
ulozDoSuboru
public void ulozDoSuboru(Súbor súbor, String identifikátor) throws IOException
Alias pre uložDoSúboru.- Výnimky:
IOException
-
-